1.本公开涉及一种用于使用行星齿轮装置传递动力的行星齿轮传动装置以及具有该行星齿轮传动装置的机器人。
背景技术:
2.通常,行星齿轮装置广泛用作传动装置。
3.行星齿轮装置包括齿圈、设置在齿圈中心的太阳齿轮、布置在齿圈和太阳齿轮之间并与齿圈和太阳齿轮接合的多个行星齿轮、以及设置有多个行星齿轮的行星架。
4.行星齿轮装置可以以各种方式传递动力。例如,在使用太阳齿轮作为输入的情况下,当行星架固定时,通过齿圈实现反向减速输出。相反,当太阳齿轮用作输入并且齿圈固定时,通过行星架实现正向减速输出。
5.另外,在使用行星架作为输入的情况下,当太阳齿轮固定时,通过齿圈实现正向加速输出,而当齿圈固定时,通过太阳齿轮实现正向加速输出。
6.另外,在使用齿圈作为输入的情况下,当太阳齿轮固定时,通过行星架实现正向减速输出,而当行星架固定时,通过太阳齿轮实现反向加速输出。
7.如上所述,行星齿轮装置可实现四个输出,即,利用一个输入的正向加速输出、正向减速输出、反向加速输出和反向减速输出。
8.然而,相关技术的行星齿轮装置具有输入部件和输出部件在行星齿轮装置的相对侧上以同一直线设置的结构。因此,尽管行星齿轮装置本身的尺寸较小,但是存在包括输入部件和输出部件的行星齿轮传动装置的尺寸较大的问题。
9.上述信息仅作为背景信息呈现,以帮助理解本公开。关于上述内容中的任何内容是否可作为关于本公开的现有技术适用,没有做出任何确定,也没有做出断言。
技术实现要素:
10.技术问题
11.本公开的各方面是为了至少解决上述问题和/或缺点,并且至少提供下面描述的优点。因此,本公开的一个方面是提供一种行星齿轮传动装置和具有该行星齿轮传动装置的机器人,该行星齿轮传动装置能够通过将输入部件和输出部件一起设置在行星齿轮装置的一侧上来减小尺寸。
12.另外的方面将部分地在下面的描述中阐述,并且部分地将从描述中显而易见,或者可通过实践所呈现的实施例而获知。
13.技术方案
14.根据本公开的一个方面,提供了一种行星齿轮传动装置。所述行星齿轮传动装置包括:行星齿轮装置,包括太阳齿轮、齿圈、多个行星齿轮和支撑多个行星齿轮的行星架;电机,被造成为产生输入到行星齿轮装置的旋转力,电机包括电机轴和支撑电机轴的电机主体;固定支架,形成为固定行星齿轮装置的太阳齿轮、齿圈或行星架中的任一个以防止旋
转;以及循环旋转支架,设置有电机并且固定到行星齿轮装置的太阳齿轮、齿圈或行星架中的未被固定支架固定的任一个,其中,循环旋转支架形成为使得电机的电机轴被连接到行星齿轮装置的太阳齿轮、齿圈或行星架中的固定支架和循环旋转支架未固定到的任一个,并且其中,当行星齿轮装置的太阳齿轮、齿圈或行星架中连接到电机轴的任一个通过电机轴旋转时,电机主体通过循环旋转支架旋转,并且电机轴的旋转力通过循环旋转支架输出。
15.行星齿轮装置的齿圈可固定到固定支架,循环旋转支架可固定到行星架,电机的电机轴可连接到太阳齿轮,并且电机的旋转力可通过固定到行星架的循环旋转支架输出到外部。
16.行星齿轮装置的太阳齿轮可固定到固定支架,循环旋转支架可固定到行星架,电机的电机轴可连接到齿圈,并且电机的旋转力可通过固定到行星架的循环旋转支架输出到外部。
17.行星齿轮装置的行星架可固定到固定支架,循环旋转支架可固定到齿圈,电机的电机轴可连接到太阳齿轮,并且电机的旋转力可通过固定到齿圈的循环旋转支架输出到外部。
18.根据本公开的另一方面,提供了一种机器人。所述机器人包括主体;移动构件,设置为相对于主体以预定角度进行旋转;以及行星齿轮传动装置,设置在主体与移动构件之间并允许移动构件相对于主体以预定角度进行旋转,其中,行星齿轮传动装置可包括:行星齿轮装置,包括太阳齿轮、齿圈、多个行星齿轮和支撑多个行星齿轮的行星架,齿圈固定到主体;循环旋转支架,固定到行星齿轮装置的行星架;以及电机,设置在循环旋转支架上并且包括连接到行星齿轮装置的太阳齿轮的电机轴,其中,移动构件固定到电机或循环旋转支架中的任一个,并且其中,当行星齿轮装置的太阳齿轮通过电机轴旋转时,电机和移动构件通过循环旋转支架旋转。
19.根据以下结合附图公开了本公开的各种实施例的详细描述,本公开的其他方面、优点和显著特征对于本领域技术人员将变得显而易见。
20.本发明的有益效果
21.与输入部件和输出部件设置在行星齿轮传动装置之间的相对侧上的相关技术的行星齿轮传动装置相比,利用根据本公开的实施例的具有上述结构的行星齿轮传动装置,行星齿轮传动装置的尺寸可减小。
附图说明
22.通过以下结合附图的描述,本公开的某些实施例的上述和其他方面、特征和优点将更加明显,其中:
23.图1是示出了相关技术的行星齿轮装置的示图;
24.图2是示出根据本公开的实施例的行星齿轮传动装置的透视图;
25.图3是示出根据本公开的实施例的行星齿轮传动装置的剖视图;
26.图4是示出根据本公开的实施例的沿着线
°‑°
截取的图3的行星齿轮传动装置的剖视图;
27.图5是示出在根据本公开的实施例的行星齿轮传动装置中使用的行星齿轮装置的透视图;
28.图6是示出根据本公开的实施例的图3的行星齿轮传动装置的循环旋转支架的透视图;
29.图7是示出根据本公开的实施例的行星齿轮传动装置的剖视图;
30.图8是示出根据本公开的实施例的行星齿轮传动装置的透视图;
31.图9是示出根据本公开的实施例的行星齿轮传动装置的剖视图;
32.图10是示出根据本公开的实施例的沿着线
±‑±
截取的图9的行星齿轮传动装置的剖视图;
33.图11是示出根据本公开的实施例的图9的行星齿轮传动装置的分解透视图;
34.图12是示出根据本公开的实施例的行星齿轮传动装置的透视图;
35.图13是示出根据本公开的实施例的行星齿轮传动装置的剖视图;
36.图14是示出根据本公开的实施例的图13的行星齿轮传动装置沿着线
2-2
'截取的剖视图;
37.图15是示出根据本公开的实施例的图13的行星齿轮传动装置的分解透视图;
38.图16是示出根据本公开的实施例的使用行星齿轮传动装置的机器人的透视图;
39.图17是示出根据本公开的实施例的连接图16的机器人的主体和头部的连接部的结构的透视图;
40.图18是示出根据本公开的实施例的使用行星齿轮传动装置的机器人臂操纵器的透视图;
41.图19是示出根据本公开的实施例的图18的机器人臂操纵器的俯仰旋转轴的分解透视图;以及
42.图20是示出根据本公开的实施例的使用行星齿轮传动装置的机器人腰连接部的透视图。
43.在整个附图中,相同的附图标记将被理解为指代相同的部件、组件和结构。
具体实施方式
44.提供参照附图的以下描述以帮助全面理解由权利要求及其等同物限定的本公开的各种实施例。它包括各种具体细节以帮助理解,但是这些细节仅被认为是示例性的。因此,本领域普通技术人员将认识到,在不脱离本公开的范围和精神的情况下,可对本文描述的各种实施例进行各种改变和修改。另外,为了清楚和简明,可省略对众所周知的功能和结构的描述。
45.在以下描述和权利要求书中使用的术语和词语不限于书面含义,而是仅由发明人使用以使得能够清楚且一致地理解本公开。因此,对于本领域技术人员显而易见的是,提供本公开的各种实施例的以下描述仅用于说明目的,而不是为了限制由所附权利要求及其等同物限定的本公开的目的。
46.应当理解,除非上下文另有明确规定,否则单数形式包括复数指示物。因此,例如,对“组件表面”的引用包括对一个或更多个这样的表面的引用。
47.术语“第一”、“第二”等可用于描述不同的组件,但是组件不受这些术语的限制。这些术语可仅用于将一个组件与其他组件区分开。例如,在不脱离本公开的范围的情况下,第一组件可被称为第二组件,并且类似地,第二组件也可被称为第一组件。
48.除非另有定义,否则本公开的实施例中使用的术语可被解释为本领域技术人员通常已知的。
49.另外,参照附图限定本公开中使用的术语“前端”、“后端”、“上侧”、“下侧”、“顶端”、“底端”等。然而,每一个组件的形状和位置不受这些术语的限制。
50.在下文中,将参照附图详细描述根据本公开的行星齿轮传动装置的某些实施例。
51.图1是示出了相关技术的行星齿轮装置的示图。
52.参照图1,行星齿轮装置1可包括被设置为在行星齿轮装置1的中心处旋转的太阳齿轮2、像行星一样围绕太阳齿轮2回转的多个行星齿轮3、被设置在多个行星齿轮3的外周上的齿圈4、以及设置有多个行星齿轮3的行星架5。
53.在如上所述的行星齿轮装置1中,当太阳齿轮2、齿圈4和行星架5中的任一个被固定并且旋转力被输入到太阳齿轮2、齿圈4和行星架5中的另一个时,速度被改变的旋转力可通过太阳齿轮2、齿圈4和行星架5中的所述另一个输出。
54.例如,当齿圈4被固定并且太阳齿轮2通过电机旋转时,被行星齿轮装置1减小的旋转通过行星架5输出。
55.详细地,在太阳齿轮2耦接到电机的电机轴(未示出)的情况下,当电机轴旋转时,太阳齿轮2与电机轴一体地旋转。
56.当太阳齿轮2旋转时,多个行星齿轮3与太阳齿轮2啮合,在图1的情况下,四个行星齿轮3通过太阳齿轮2旋转。此时,多个行星齿轮3内切在具有形成在内周表面上的齿的齿圈4中。因此,多个行星齿轮3在被太阳齿轮2旋转的同时沿着齿圈4围绕太阳齿轮2回转。
57.因为多个行星齿轮3设置在行星架5上,所以当多个行星齿轮3回转时,行星架5基于太阳齿轮2旋转。与电机轴的转速相比,行星架5通过以预定齿轮比减速进行旋转。在这种情况下,行星齿轮装置1的齿轮比为s/(s r)。这里,s是太阳齿轮2的齿数,并且r是齿圈4的齿数。
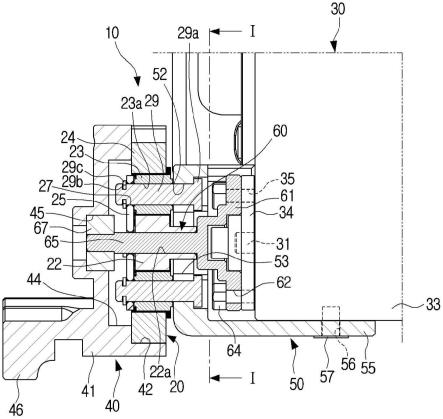
58.图2是示出根据本公开的实施例的行星齿轮传动装置的透视图,并且图3是示出根据本公开的实施例的行星齿轮传动装置的剖视图。图4是示出根据本公开的实施例的沿着线
°‑°
截取的图3的行星齿轮传动装置的剖视图。图5是示出根据本公开的实施例的行星齿轮传动装置中使用的行星齿轮装置的透视图。图6是示出根据本公开的实施例的图3的行星齿轮传动装置的循环旋转支架的透视图。
59.参照图2至图6,根据本公开的实施方式的行星齿轮传动装置10可包括行星齿轮装置20、电机30、固定支架40和循环旋转支架50。
60.行星齿轮装置20可包括太阳齿轮22、多个行星齿轮23、齿圈24和支撑多个行星齿轮23的行星架25。行星齿轮装置20与图1中所示和所述的相关技术的行星齿轮装置1相同或相似;因此,省略其详细描述。
61.然而,根据本公开的实施方式的行星齿轮装置20与图1所示的相关技术的行星齿轮装置1的不同之处在于,行星齿轮装置20包括设置在齿圈24的外周表面上的多个突起26,如图5所示。
62.电机30可形成为产生输入到行星齿轮装置20的旋转力。电机30可包括电机轴31和电机主体33。
63.电机主体33可形成为支撑电机轴31的旋转。转子(未示出)和定子(未示出)可设置
在电机主体33内部以使电机轴31旋转。减速器(未示出)可设置在电机主体33内。
64.例如,可使用减速器内置在电机主体33中的减速器集成电机作为电机30。例如,减速器可将电机30的旋转减少1/350。在根据本公开的实施例的行星齿轮传动装置10的情况下,使用减速器集成电机。另外,伺服电机可用作电机30。
65.固定支架40可形成为对行星齿轮装置20进行固定。详细地,固定支架40可固定行星齿轮装置20的太阳齿轮22、齿圈24和行星架25中的任一个以防止旋转。因此,当电机轴31旋转时,行星齿轮装置20的被固定支架40固定的一部分(即,行星齿轮装置20的太阳齿轮22、齿圈24和行星架25中被固定支架40固定的任一个)不旋转。
66.例如,在行星齿轮装置20的齿圈24固定到固定支架40的情况下,当电机30的电机轴31旋转时,齿圈24不旋转,并且仅太阳齿轮22和多个行星齿轮23旋转。
67.循环旋转支架50可设置在电机30上。循环旋转支架50可形成为使得行星齿轮装置20的太阳齿轮22、齿圈24和行星架25中的未被固定支架40固定的任一个固定到循环旋转支架50。
68.另外,循环旋转支架50可形成为使得电机30的电机轴31将旋转力传递到行星齿轮装置20的太阳齿轮22、齿圈24和行星架25中的未被固定到固定支架40的另一个和循环旋转支架50。
69.因此,当电机轴31旋转时,行星齿轮装置20的太阳齿轮22、齿圈24和行星架25中连接到电机轴31的任一个旋转,使得行星齿轮装置20的太阳齿轮22、齿圈24和行星架25中的设置有循环旋转支架50的另一个旋转。
70.然后,由于循环旋转支架50旋转,所以电机主体33旋转,也就是说,设置在循环旋转支架50中的电机30旋转。换句话说,循环旋转支架50通过电机轴31的旋转而旋转一定角度,从而电机30本身以一定角度旋转。
71.另一方面,电机轴31的旋转力可通过循环旋转支架50输出。换句话说,输出部件可设置在循环旋转支架50上。可选地,输出部件可设置在固定到循环旋转支架50的电机30上。
72.因为电机30固定到循环旋转支架50,所以电机30以与循环旋转支架50相同的方式旋转。
73.在下文中,将详细描述行星齿轮装置20的太阳齿轮22、齿圈24和行星架25中的任一个用作用于固定行星齿轮装置20的固定部件、电机30的旋转力被输入到的输入部件和通过行星齿轮装置20的旋转力被输出的输出部件中的任一个的各种示例。
74.首先,将参照图2、图3、图4和图5详细描述行星齿轮装置20的齿圈24被固定、太阳齿轮22用作输入部件并且行星架25用作输出部件的情况。
75.固定支架40可形成为固定行星齿轮装置20的齿圈24。因此,当电机轴31旋转时,设置在固定支架40上的齿圈24不旋转。固定支架40可包括容纳部41和延伸部46。
76.容纳部41可包括圆形插入凹槽42,其中,行星齿轮装置20的齿圈24插入到该圆形插入凹槽42中。容纳部41的插入凹槽42的直径可形成为与行星齿轮装置20的外径(即,齿圈24的外径)相应。
77.当多个突起26形成在行星齿轮装置20的外周表面上(即,在齿圈24的外周表面上)时,与行星齿轮装置20的多个突起26相应的多个凹槽43可设置在插入凹槽42周围。
78.台阶部44可设置在插入凹槽42的底部。台阶部44可形成为直径小于插入凹槽42的
直径的圆形凹槽。台阶部44的宽度可被确定为稳定地支撑齿圈24。台阶部44的深度可被确定使得从行星架25突出的多个轴29的尖端不接触台阶部44的底部。
79.轴承槽45可设置在台阶部44的中心。用于支撑设置有太阳齿轮22的支撑适配器60的一端的轴承67可被设置在轴承槽45中。
80.延伸部46可从容纳部41的外周表面延伸,并且可形成为被固定到设置有固定支架40的另一部分。例如,当根据本公开的实施例的行星齿轮传动装置10应用于机器人的头部连接部时(参见图16),固定支架40的延伸部46可固定到机器人的主体。
81.循环旋转支架50可设置为与行星架25一体地旋转。在该实施例的情况下,循环旋转支架50不直接固定到行星架25,而是固定到设置在行星架25上的多个行星齿轮23的相对侧。详细地,行星架25和循环旋转支架50可设置为支撑多个行星齿轮23的两端。
82.为此,行星架25可形成为盘形并且设置有与多个行星齿轮23相应的多个通孔27。例如,当行星齿轮装置20包括四个行星齿轮23时,四个通孔27形成在行星架25中。
83.稍后将描述的适配器60穿过的中心孔28可形成在行星架25的中心。多个通孔27可以以预定间隔围绕行星架25的中心孔28形成。
84.轴孔23a可形成在多个行星齿轮23中的每一个行星齿轮23的中心。
85.电机30可设置在循环旋转支架50上以将动力传递到太阳齿轮22。
86.循环旋转支架50可包括行星齿轮固定部51和电机固定部55。行星齿轮固定部51和电机固定部55可被形成为形成大致直角。因此,循环旋转支架50可形成为近似l形。
87.行星齿轮固定部51可设置有与多个行星齿轮23相应的多个固定孔52和连接到电机轴31的适配器60所穿过的适配器孔53。多个固定孔52可以以预定间隔围绕适配器孔53形成。
88.适配器60可形成为连接太阳齿轮22和电机轴31,以将电机轴31的动力传递到太阳齿轮22。
89.连接板34可设置在电机轴31的前端。连接板34可耦接到电机轴31的前端,以便与电机轴31一体地旋转。连接板34可形成为大致盘形,并且具有围绕电机轴31设置的多个紧固孔35。内螺纹可形成在多个紧固孔35中。
90.适配器60可耦接到太阳齿轮22,并且可固定到被耦接到电机轴31的连接板34。适配器60可包括基部61和从基部61的中心垂直突出的轴部65。
91.基部61可形成为与电机30的连接板34相应的盘,并且可具有以预定间隔围绕轴部65形成的多个固定孔62。因此,当多个螺栓64通过多个固定孔62被紧固到连接板34的多个紧固孔35时,适配器60固定到连接板34。
92.轴部65可从基部61的中心竖直地延伸,并且太阳齿轮22可耦接到轴部65。轴部65被插入的轴孔22a可设置在太阳齿轮22的中心。因此,太阳齿轮22可与轴部65一体地旋转。
93.轴部65的前端可由设置在固定支架40的容纳部41的底部处的轴承67支撑。
94.因此,当电机轴31旋转时,连接板34旋转,并且当连接板34旋转时,适配器60与连接板34一体地旋转。当适配器60旋转时,固定到适配器60的轴部65的太阳齿轮22与适配器60一体地旋转。
95.循环旋转支架50、多个行星齿轮23和行星架25可被多个轴29一体地固定。为此,多个轴29中的每一个轴29可包括形成在轴29的一端处的头部29a和形成在轴29的另一端处的
环槽29b。头部29a可形成为具有大于轴29的直径的直径。环槽29b可形成为沿着轴29的外周表面具有预定深度的槽,使得卡环29c插入环槽29b中。
96.因此,当多个轴29插入循环旋转支架50的行星齿轮固定部51的多个固定孔52中时,多个行星齿轮23的轴孔23a、行星架25的多个通孔27和多个卡环29c设置在从行星架25向外突出的多个轴29的尖端的环槽29b中,循环旋转支架50、多个行星齿轮23和行星架25一体地固定。
97.因此,当多个行星齿轮23通过太阳齿轮22旋转时,行星架25和循环旋转支架50一体地旋转。另外,多个行星齿轮23可分别相对于多个轴29旋转。
98.电机固定部55可设置有用于固定电机30的多个电机固定孔56。电机30的一个侧表面可设置有与多个电机固定孔56相应的多个内螺纹。
99.因此,当多个螺栓57通过循环旋转支架50的电机固定部55的多个电机固定孔56紧固到电机30的多个内螺纹时,电机30被固定到循环旋转支架50。
100.另外,多个子电机固定部58可设置在行星齿轮固定部51中。多个子电机固定部58可设置有子固定孔58a。与多个子固定孔58a相应的多个前内螺纹可设置在电机30的前表面上。
101.因此,当多个螺栓59通过循环旋转支架50的多个子电机固定部58的子固定孔58a紧固到电机30的多个前内螺纹时,电机30被固定到循环旋转支架50。
102.如上所述,当循环旋转支架50利用电机固定部55和多个子电机固定部58被设置在电机30上时,循环旋转支架50和电机30可彼此牢固地耦接。
103.在以上描述中,电机30和循环旋转支架50使用多个螺栓彼此耦接,但是耦接电机30和循环旋转支架50的方法不限于此。尽管未示出,但是可使用各种耦接方法,只要电机30和循环旋转支架50可彼此耦接即可。
104.当电机30固定到循环旋转支架50时,设置在电机轴31的前端处的适配器60可通过循环旋转支架50的适配器孔53突出。适配器60的轴部65可耦接到设置在多个行星齿轮23的中心处的太阳齿轮22。因此,当电机轴31旋转时,太阳齿轮22通过连接板34和适配器60与电机轴31一体地旋转。
105.当太阳齿轮22旋转时,与太阳齿轮22啮合的多个行星齿轮23旋转。当多个行星齿轮23旋转时,行星架25和循环旋转支架50基于太阳齿轮22的旋转轴(即,电机轴31的中心轴)旋转。换句话说,当太阳齿轮22旋转时,与太阳齿轮22啮合的多个行星齿轮23分别基于轴29旋转,并且沿着齿圈24回转。
106.多个行星齿轮23的回转旋转使得行星架25和循环旋转支架50基于太阳齿轮22的中心轴旋转。
107.输出构件可固定到循环旋转支架50。例如,当根据本公开的实施例的行星齿轮传动装置10应用于机器人的头部连接部时(参见图16),循环旋转支架50可固定到机器人的头部。在这种情况下,当循环旋转支架50旋转时,机器人的头部可相对于主体以预定角度进行旋转。
108.另一方面,在根据本公开的实施例的行星齿轮传动装置10中,当循环旋转支架50旋转时,固定到循环旋转支架50的电机30也与循环旋转支架50一体地旋转。因此,循环旋转支架50的旋转进一步使电机轴31旋转。结果,根据本公开的实施例的行星齿轮传动装置10
的齿轮比可与相关技术的行星齿轮装置的齿轮比不同。
109.如在上述实施例中那样,当齿圈24固定时,太阳齿轮22用作输入部件,并且行星架25用作输出部件,相关技术的行星齿轮装置1的齿轮比为s/(s r)。这里,s是太阳齿轮的齿数,r是齿圈的齿数。
110.因此,当电机30使太阳齿轮22旋转n次时,行星架25旋转{s/(s r)}n=an(a=s/(s r))次。
111.此时,因为循环旋转支架50固定到行星架25并且电机30固定到循环旋转支架50,所以行星架25的旋转使电机30旋转预定角度。因此,太阳齿轮22也旋转额外的预定角度。当太阳齿轮22进一步旋转预定角度时,行星架25也进一步旋转。该过程可无限地重复并收敛。该结果可表示为如下公式:
112.太阳齿轮:
113.行星架:
114.换句话说,在根据本公开的实施例的行星齿轮传动装置10中,当太阳齿轮22通过电机30旋转n次时,行星架25旋转bn次。因为行星架25设置有循环旋转支架50,所以当行星架25旋转时,循环旋转支架50一体地旋转。因此,固定到循环旋转支架50的输出构件旋转bn次。结果,根据本公开的实施例的行星齿轮传动装置10的转矩可以以齿轮比增加1/b倍。
115.如上所述,在根据本公开的实施方式的行星齿轮传动装置10中,因为用于输入动力的电机30和用于输出动力的输出构件都设置在循环旋转支架50中,其中,循环旋转支架50设置在行星齿轮装置20的一侧上,所以齿轮比与相关技术的行星齿轮装置1的齿轮比不同。
116.在以上描述中,循环旋转支架50基于多个行星齿轮23设置在行星架25的相对侧上。然而,循环旋转支架50的安装不限于此。作为另一示例,尽管未示出,但是循环旋转支架50可直接固定到行星架25。
117.另外,在以上描述中,电机轴31和太阳齿轮22使用适配器60和连接板34彼此连接,但是电机轴31和太阳齿轮22的连接不限于此。作为另一示例,如图7所示,太阳齿轮22可直接设置在电机轴31'的前端。
118.图7是示出根据本公开的实施例的行星齿轮传动装置的剖视图。
119.参照图7,当电机30'固定到循环旋转支架50时,电机轴31'通过循环旋转支架50的适配器孔53突出。电机轴31'耦接到设置在多个行星齿轮23的中心处的太阳齿轮22。因此,当电机轴31'旋转时,太阳齿轮22与电机轴31'一体地旋转。
120.图7所示的行星齿轮传动装置10'与根据上述实施例的行星齿轮传动装置10的不同之处仅在于电机轴31'和太阳齿轮22之间的连接结构,因此省略行星齿轮传动装置10'的详细描述。
121.在以上描述中,行星齿轮传动装置10使用如图5所示的包括设置在齿圈24的外周表面上的多个突起26的行星齿轮装置20。然而,作为另一实施例,根据本公开的实施例的行星齿轮传动装置10可使用如图1所示的在齿圈的外周表面上没有突起的行星齿轮装置1来实现。
122.接下来,将参照图8、图9、图10和图11详细描述行星齿轮装置20的行星架25被固定、太阳齿轮22被用作输入部件、并且齿圈24被用作输出部件的行星齿轮传动装置110。
123.图8是示出根据本公开的实施例的行星齿轮传动装置的透视图。图9是示出根据本公开的实施例的行星齿轮传动装置的剖视图。图10是示出根据本公开的实施例的沿着线
±‑±
截取的图9的行星齿轮传动装置的剖视图。图11是示出根据本公开的实施例的图9的行星齿轮传动装置的分解透视图。
124.参照图8至图11,固定支架140可形成为对行星齿轮装置120的行星架125进行固定。因此,当电机轴31旋转时,设置在固定支架140上的行星架125不旋转。
125.固定支架140可包括固定部141和延伸部146。
126.固定部141可形成为圆柱形,以固定行星齿轮装置120的行星架125。因此,行星架125可固定到固定部141的一端。在图9、图10和图11所示的实施例的情况下,行星架125可与固定部141的顶表面一体地形成。换句话说,固定部141的顶表面可形成为用作行星架125。
127.与行星架125的多个通孔127和中心孔128相应的多个孔142可形成在具有圆柱形形状的固定部141内部。
128.行星架125可形成为盘形并且设置有与多个行星齿轮123相应的多个通孔127。例如,当行星齿轮装置120包括四个行星齿轮123时,在行星架125中形成四个通孔127。
129.设置在电机轴31上的适配器160穿过的中心孔128可形成在行星架125的中心。多个通孔127可以以预定间隔围绕行星架125的中心孔128形成。
130.轴孔123a可形成在多个行星齿轮123中的每一个行星齿轮123的中心。
131.多个行星齿轮123可通过多个轴129固定到行星架125。为此,多个轴129中的每一个轴129可包括形成在轴129的一端处的头部129a和形成在轴129的另一端处的环槽129b。
132.头部129a可形成为具有大于轴129的直径的直径。环槽129b可形成为沿着轴29的外周表面具有预定深度的槽,使得卡环129c插入环槽129b中。
133.因此,当多个轴129插入多个行星齿轮123的多个轴孔123a和行星架125的多个通孔127中,并且多个卡环129c设置在从行星架125向下突出的多个轴129的尖端的环槽129b中时,多个行星齿轮123固定到行星架125。
134.因此,多个行星齿轮123中的每一个行星齿轮123可在被设置在行星架125上时相对于多个轴129中的每一个轴129旋转。
135.延伸部146可从固定部141的另一端延伸,并且可形成为被固定到设置有固定支架140的另一组件。例如,当根据本公开的实施例的行星齿轮传动装置110应用于机器人的头部连接部时(参见图16),固定支架140的延伸部146可固定到机器人的主体。
136.循环旋转支架150可设置为与齿圈124一体地旋转。在该实施例中,齿圈124固定到循环旋转支架150,使得当齿圈124旋转时,循环旋转支架150与齿圈124一体地旋转。
137.电机30可设置在循环旋转支架150上以将动力传递到太阳齿轮122。
138.循环旋转支架150可包括齿圈固定部151和电机固定部155。齿圈固定部151和电机固定部155可被形成为形成大致直角。因此,循环旋转支架150可形成为近似l形。
139.齿圈固定部151可与齿圈124一体地形成。例如,齿圈124可形成在齿圈固定部151中。然后,当齿圈124旋转时,循环旋转支架150与齿圈124一体地旋转。
140.作为另一示例,尽管未示出,但是齿圈固定部151和齿圈124可单独形成。在这种情
况下,如图5所示的行星齿轮装置20的齿圈24被插入的齿圈孔可形成在齿圈固定部151中,并且齿圈24可连接到齿圈孔。在这种情况下,可围绕齿圈孔设置与行星齿轮装置20的多个突起26相应的多个凹槽。
141.电机固定部155可设置有用于固定电机30的多个电机固定孔156。与多个电机固定孔156相应的多个内螺纹可设置在电机30的一个侧表面上。
142.因此,当多个螺栓157通过循环旋转支架150的电机固定部155的多个电机固定孔156紧固到电机30的多个内螺纹时,电机30固定到循环旋转支架150。
143.另外,循环旋转支架150可包括子电机固定部158。子电机固定部158可设置在齿圈固定部151上,并且可形成为固定到电机30的前表面。
144.在图11所示的实施例的情况下,循环旋转支架150包括两个子电机固定部158。子固定孔158a可设置在子电机固定部158的前端。
145.另外,与子电机固定部158的子固定孔158a相应的前内螺纹可设置在电机30的前表面上。因此,当螺栓159通过子电机固定部158的子固定孔158a紧固到电机30的前内螺纹时,循环旋转支架150可固定到电机30的前表面。
146.如上所述,当循环旋转支架150利用电机固定部155和多个子电机固定部158被设置在电机30上时,循环旋转支架150和电机30可彼此牢固地耦接。
147.电机30的电机轴31和行星齿轮装置120的太阳齿轮122可通过适配器60和连接板34连接。因此,当电机轴31旋转时,太阳齿轮122与电机轴31一体地旋转。
148.适配器60和连接板34的结构与根据上述实施例的行星齿轮传动装置10的适配器60和连接板34相同或相似;因此,省略适配器60和连接板34的结构的详细描述。
149.当电机轴31旋转时,连接板34旋转,并且当连接板34旋转时,适配器60与连接板34一体地旋转。当适配器60旋转时,固定到适配器60的轴部65的太阳齿轮122与适配器60一体地旋转。
150.当太阳齿轮122旋转时,与太阳齿轮122啮合的多个行星齿轮123中的每一个行星齿轮123绕轴129旋转。
151.当多个行星齿轮123旋转时,与多个行星齿轮123啮合的齿圈124围绕太阳齿轮122的中心轴(即,电机轴31的中心轴)旋转。
152.此时,因为行星架125与固定支架140一体形成,所以当太阳齿轮122旋转时,行星架125不旋转,并且与太阳齿轮122啮合的多个行星齿轮123分别基于多个轴129旋转。然后,齿圈124通过多个行星齿轮123的旋转而基于太阳齿轮122的中心轴旋转。
153.在这种情况下,因为齿圈124固定到循环旋转支架150,所以当齿圈124旋转时,循环旋转支架150与齿圈124一体地旋转。
154.输出构件可固定到循环旋转支架150。例如,当根据本公开的实施例的行星齿轮传动装置110应用于机器人的头部连接部时(参见图16),循环旋转支架150可固定到机器人的头部。在这种情况下,当循环旋转支架150旋转时,机器人的头部可相对于主体以预定角度进行旋转。
155.另一方面,在根据本公开的实施例的行星齿轮传动装置110中,当循环旋转支架150旋转时,固定到循环旋转支架150的电机30也与循环旋转支架150一体地旋转。
156.因此,循环旋转支架150的旋转进一步使电机轴31旋转预定角度。结果,根据本公
开的实施例的行星齿轮传动装置110的齿轮比可与相关技术的行星齿轮装置1的齿轮比不同。
157.如在上述实施例中那样,当行星架125固定时,太阳齿轮22用作输入部件,并且齿圈124用作输出部件,相关技术的行星齿轮装置1的齿轮比为-s/r。这里,s是太阳齿轮的齿数,r是齿圈的齿数。
158.因此,当电机30使太阳齿轮122旋转n次时,齿圈124旋转(-s/r)n=-bn(b=s/r)次。
159.此时,因为齿圈124设置在循环旋转支架150中并且电机30固定到循环旋转支架150上,所以齿圈124的旋转使电机30旋转预定角度。因此,太阳齿轮22也旋转与电机30相同的角度。
160.当太阳齿轮22进一步旋转时,齿圈124也进一步旋转。该过程可无限地重复并收敛。该结果可表示为如下公式:
161.太阳齿轮:
162.齿圈:
163.换句话说,在根据本公开的实施例的行星齿轮传动装置110中,当太阳齿轮122通过电机30旋转n次时,齿圈124旋转-an次。因为齿圈124布置在循环旋转支架150中,所以当齿圈124旋转时,循环旋转支架150一体地旋转。因此,固定到循环旋转支架150的输出构件旋转-an次。结果,根据本公开的实施例的行星齿轮传动装置110的转矩可由于齿轮比而增加1/a倍。
164.如上所述,在根据本公开的实施方式的行星齿轮传动装置110中,因为用于输入动力的电机30和用于输出动力的输出构件都设置在循环旋转支架150中,其中,循环旋转支架150设置在行星齿轮装置120的一侧上,所以齿轮比与相关技术的行星齿轮装置1的齿轮比不同。
165.最后,将参照图12、图13、图14和图15详细描述行星齿轮装置220的太阳齿轮222被固定、齿圈224被用作输入部件、并且行星架225被用作输出部件的行星齿轮传动装置210。
166.图12是示出根据本公开的实施例的行星齿轮传动装置的透视图。图13是示出根据本公开的实施例的行星齿轮传动装置的剖视图。图14是示出根据本公开的实施例的图13的行星齿轮传动装置沿着线2-2截取的剖视图。图15是示出根据本公开的实施例的图13的行星齿轮传动装置的分解透视图。
167.参照图12至图15,固定支架240可形成为固定行星齿轮装置220的太阳齿轮222。因此,当电机轴31旋转时,设置在固定支架240上的太阳齿轮222不旋转。
168.固定支架240可包括固定部241和延伸部246。
169.固定部241可形成为圆柱形以固定行星齿轮装置220的太阳齿轮222。
170.例如,轴承支撑部243可形成在固定部241的前端处,并且太阳齿轮固定部244可形成在轴承支撑部243的前端处。轴承支撑部243的直径可形成为小于固定部241的直径。因此,可在固定部241和轴承支撑部243之间形成能够支撑轴承267的台阶。
171.太阳齿轮固定部244的直径可形成为小于轴承支撑部243的直径。因此,可在轴承
支撑部243和太阳齿轮固定部244之间形成能够支撑太阳齿轮222的台阶。
172.太阳齿轮固定部244插入的太阳齿轮孔222a可形成在太阳齿轮222的中心。太阳齿轮固定部244插入太阳齿轮孔222a中,并且太阳齿轮222被固定为相对于太阳齿轮固定部244不旋转。
173.延伸部246可从固定部241的另一端延伸,并且可形成为被固定到设置有固定支架240的另一组件。例如,当根据本公开的实施例的行星齿轮传动装置210应用于机器人的头部连接部时(参见图16),固定支架240的延伸部246可固定到机器人的主体。
174.循环旋转支架250可设置为与行星架225一体地旋转。在该实施例的情况下,循环旋转支架250可形成为固定到行星架225。因此,当行星架225旋转时,循环旋转支架250可与行星架225一体地旋转。
175.电机30可设置在循环旋转支架250上以将动力传递到齿圈224。
176.循环旋转支架250可包括行星架固定部251和电机固定部255。行星架固定部251和电机固定部255可形成为形成大致直角。在该实施例的情况下,如图15所示,循环旋转支架250可形成为具有平坦底部的近似u形。
177.行星架225可设置在行星架固定部251的一个表面上。行星架225可与行星架固定部251一体形成,或者可与行星架固定部251分开形成。当行星架225与行星架固定部251分开形成时,行星架225可用诸如螺栓的紧固元件固定到行星架固定部251。在该实施例的情况下,行星架225一体地形成在行星架固定部251的上表面上。
178.行星架225可形成为盘形,并且可设置有与多个行星齿轮223相应的多个通孔227。例如,当行星齿轮装置220包括四个行星齿轮223时,在行星架225中形成四个通孔227。另外,行星架固定部251可设置有与行星架225的四个通孔227相应的四个固定孔252。
179.在该实施例的情况下,因为行星架225和行星架固定部251一体地形成,所以行星架225的四个通孔227和行星架固定部251的四个固定孔252可分别一体地形成。
180.固定部241的太阳齿轮固定部244穿过的中心孔228可形成在行星架225的中心。多个通孔227可以以预定间隔围绕行星架225的中心孔228形成。
181.与行星架225的中心孔228相应并且固定支架240的固定部241穿过的轴承孔253可形成在行星架固定部251的中心。多个固定孔252可围绕行星架固定部251的支承孔253以预定间隔形成。
182.在该实施例的情况下,因为行星架225和行星架固定部251一体地形成,所以行星架225的中心孔228和行星架固定部251的轴承孔253可一体地形成。
183.轴承267可设置在行星架固定部251的轴承孔253中,并且可支撑行星架固定部251以相对于固定部241平滑地旋转。因此,循环旋转支架250可基于固定支架240的固定部241旋转。
184.轴孔223a可形成在多个行星齿轮223中的每一个行星齿轮223的中心。
185.多个行星齿轮223、行星架225和行星架固定部251可通过多个轴229一体地固定。为此,多个轴229中的每一个轴229可包括形成在轴229的一端处的头部229a和形成在轴229的另一端处的环槽229b。
186.头部229a可形成为具有大于轴229的直径的直径。环槽229b可形成为沿着轴229的外周表面具有预定深度的槽,使得卡环229c插入环槽229b中。
187.因此,当多个轴229插入多个行星齿轮223的多个轴孔223a和行星架225的多个通孔227中,并且多个卡环229c设置在从行星架225向外突出的多个轴229的尖端的环槽229b中时,多个行星齿轮223、行星架225和循环旋转支架250的行星架固定部251一体地固定。
188.因此,当多个行星齿轮223旋转时,行星架225和循环旋转支架250一体地旋转。另外,多个行星齿轮223中的每一个行星齿轮223可相对于多个轴229中的每一个轴229旋转。
189.电机固定部255可设置有用于固定电机30的多个电机固定孔256。电机固定部255可形成为从行星架固定部251的两端垂直延伸的两个平板。
190.电机30的两个侧表面可设置有与形成在电机固定部255中的多个电机固定孔256相应的多个内螺纹39。
191.因此,当多个螺栓257通过循环旋转支架250的电机固定部255的多个电机固定孔256被紧固到电机30的多个内螺纹39时,电机30固定到循环旋转支架250。
192.适配器260可形成为连接齿圈224和电机轴31,使得电机轴31的动力传递到齿圈224。
193.连接板34可设置在电机轴31的前端。连接板34可形成为在电机轴31的前端与电机轴31一体地旋转。
194.连接板34可形成为大致盘形,并且可设置有围绕电机轴31形成的多个紧固孔35。内螺纹可形成在多个紧固孔35中的每一个紧固孔35中。
195.适配器260可耦接到齿圈224,并且可固定到被连接到电机轴31的连接板34。适配器260可与齿圈224一体地形成。
196.适配器260可包括基部261、连接部263和齿圈板265。
197.基部261可形成为与电机30的连接板34相应的盘,并且可设置有以预定间隔围绕连接部263形成的多个固定孔262。因此,当多个螺栓264通过多个固定孔262被紧固到连接板34的多个紧固孔35时,适配器260固定到连接板34。
198.连接部263可从基部261的中心垂直地延伸,并且可连接到齿圈板265。连接部263可与基部261和齿圈板265一体地形成。
199.齿圈板265可形成为与齿圈224相应的盘,可与多个行星齿轮223和太阳齿轮222间隔开,并且可形成为被连接到齿圈224。
200.在该实施例的情况下,齿圈板265可与齿圈224一体地形成。尽管未示出,但是作为另一示例,齿圈板265可与齿圈224分开形成,并且可通过紧固元件(诸如螺栓)耦接到齿圈224。
201.当电机30固定到循环旋转支架250时,设置在电机轴31的前端处的连接板34被连接到与齿圈224耦接的适配器260。因此,当电机轴31旋转时,连接板34旋转。当连接板34旋转时,适配器260与连接板34一体地旋转。
202.当适配器260旋转时,固定到适配器260的齿圈板265的齿圈224可与电机轴31一体地旋转。
203.当齿圈224旋转时,与齿圈224啮合的多个行星齿轮223旋转。当多个行星齿轮223旋转时,行星架225和循环旋转支架250基于太阳齿轮222的中心轴(即,电机轴31的中心轴)旋转。
204.换句话说,当齿圈224旋转时,与齿圈224啮合的多个行星齿轮223分别围绕多个轴
229旋转,并且沿着齿圈224围绕太阳齿轮222回转。行星架225和循环旋转支架250通过多个行星齿轮223的回转而基于太阳齿轮222旋转。
205.输出构件可固定到循环旋转支架250。例如,当根据本公开的实施例的行星齿轮传动装置210应用于机器人的头部连接部时(参见图16),循环旋转支架250可固定到机器人的头部。在这种情况下,当循环旋转支架250旋转时,机器人的头部可相对于主体以预定角度进行旋转。
206.另一方面,在根据本公开的实施例的行星齿轮传动装置210中,当循环旋转支架250旋转时,固定到循环旋转支架250的电机30也与循环旋转支架250一体地旋转。
207.因此,循环旋转支架250的旋转进一步使电机轴31旋转预定角度。结果,根据本公开的实施例的行星齿轮传动装置210的齿轮比可与相关技术的行星齿轮装置的齿轮比不同。
208.如在上述实施例中那样,当太阳齿轮222固定时,齿圈224用作输入部件,并且行星架225用作输出部件,相关技术的行星齿轮装置1的齿轮比为r/(s r)。这里,s是太阳齿轮的齿数,r是齿圈的齿数。
209.因此,当电机30使齿圈224旋转n次时,行星架225旋转(r/(s r))n=cn(c=r/(s r))次。
210.此时,因为行星架225设置在循环旋转支架250中并且电机30固定到循环旋转支架250,所以行星架225的旋转使电机30旋转预定角度。因此,齿圈224也旋转与电机30相同的角度。
211.当齿圈224进一步旋转时,行星架225也进一步旋转。该过程可无限地重复并收敛。该结果可表示为如下公式:
212.齿圈:
213.行星架:
214.换句话说,在根据本公开的实施例的行星齿轮传动装置210中,当齿圈224通过电机30旋转n次时,行星架225旋转(1/b)n次。因为行星架225设置在循环旋转支架250中,所以当行星架225旋转时,循环旋转支架250一体地旋转。因此,固定到循环旋转支架250的输出构件旋转(1/b)n次。结果,根据本公开的实施例的行星齿轮传动装置210的转矩可由于齿轮比而增加b倍。
215.如上所述,在根据本公开的实施方式的行星齿轮传动装置210中,因为用于输入动力的电机30和用于输出动力的输出构件都设置在循环旋转支架250中,其中,循环旋转支架250设置在行星齿轮装置220的一侧上,所以齿轮比与相关技术的行星齿轮装置1的齿轮比不同。
216.与输入部件和输出部件设置在行星齿轮装置之间的相对侧上的相关技术的行星齿轮传动装置相比,当输入部件和输出部件两者都设置在行星齿轮装置20、120和220的一侧时,与根据本公开的实施例的具有上述结构的行星齿轮传动装置10、110和210一样,行星齿轮传动装置的尺寸可减小。
217.在下文中,将描述包括如上所述的根据本公开的实施例的行星齿轮传动装置的机
器人。
218.图16是示出根据本公开的实施例的使用行星齿轮传动装置的机器人的透视图。作为参考,图16中所示的机器人300表示能够自主移动以运输可在商店等中使用的物品并且具有以预定角度进行旋转的头部320的机器人。
219.参照图16,根据本公开的实施例的机器人300可包括主体310和头部320。
220.主体310在主体310的下部设置有多个轮(未示出),使得主体310可被自主地驱动。能够接收物品的置物架312可设置在主体310的后部。置物架312可根据机器人300承载的物品的类型形成为适当的形状。
221.头部320设置在主体310的上端,并且可形成为与主体310一起在垂直方向和水平方向上以预定角度进行旋转。根据本公开的实施例的行星齿轮传动装置10、110和210可用作连接头部320和主体310的连接部330。
222.在下文中,将参照图17详细描述连接图16的机器人300的主体310和头部320的连接部330的结构。
223.图17是示出根据本公开的实施例的连接图16的机器人的主体和头部的连接部的结构的透视图。作为参考,图17示出了从图16的机器人300去除覆盖主体310和头部320的盖的状态。
224.参照图17,根据本公开的实施例的连接机器人300的主体310和头部320的连接部330可包括主体框架331、头部框架332和行星齿轮传动装置10。
225.主体框架331可设置在主体310的上端,并且行星齿轮传动装置10可设置在主体框架331中。
226.允许头部框架332围绕垂直于主体框架331的垂直轴334相对于主体框架331在左右方向(箭头a)上旋转的水平旋转部333可设置在主体框架331的上表面上。
227.用于支撑头部框架332的一对固定部335可设置在水平旋转部333的上表面上。该对固定部335可彼此间隔开预定距离设置在水平旋转部333的上表面上。连接到行星齿轮传动装置10的固定支架40和支撑支架90可分别设置在一对固定部335处。
228.头部框架332可被设置为相对于主体310(即,主体框架331)以预定角度进行旋转。例如,头部框架332可被设置为围绕平行于主体框架331的上表面的水平轴336在垂直方向(箭头b)上以预定角度进行旋转。因此,头部框架332可被称为能够相对于主体310以预定角度进行旋转的移动构件。
229.行星齿轮传动装置10可设置在主体310和头部320之间,并且可允许头部320相对于主体310在竖直方向上以预定角度进行旋转。例如,行星齿轮传动装置10设置在主体框架331和头部框架332之间,并且允许头部框架332相对于主体框架331在竖直方向上以预定角度进行旋转。
230.详细地,头部框架332固定到行星齿轮传动装置10的输出部件,使得头部框架332可通过行星齿轮装置20的输出以预定角度进行旋转。在这种情况下,用于将动力输入到行星齿轮装置20的电机30设置在行星齿轮装置20的输出部件处。
231.如上所述,根据本公开的实施例的行星齿轮传动装置10可形成为通过行星齿轮装置20的行星架25、齿圈24和太阳齿轮22中的任一个输出电机30的动力。
232.因此,在主体框架331和头部框架332之间,可设置上述各种行星齿轮传动装置10、
110、210中的任一个。
233.图17示出了连接机器人300的主体310和头部320的连接部330的结构,并且行星齿轮传动装置10被施加到连接部330,其中,在行星齿轮传动装置10中,电机30的旋转力被输入到太阳齿轮22,然后通过行星架25被输出,如图2、图3、图4和图5所示。
234.参照图17,行星齿轮传动装置10可包括行星齿轮装置20、循环旋转支架50和电机30。
235.行星齿轮装置20可包括太阳齿轮22、齿圈24、多个行星齿轮23和支撑多个行星齿轮23的行星架25,并且齿圈24可固定到主体310。
236.详细地,齿圈24固定到固定支架40,并且固定支架40设置在主体框架331上。换句话说,固定支架40设置一对固定部335中的一个固定部335上,该对固定部335设置在主体框架331的水平旋转部333上。
237.支撑支架90设置在水平旋转部333的一对固定部335中的另一个固定部335上以面向固定支架40。支撑支架90可设置为可旋转地支撑电机30的另一端。
238.因此,电机30可基于穿过电机轴31(参见图3)的直线(即,水平轴336)相对于固定支架40和支撑支架90旋转。
239.由于电机30固定到头部框架332,因此当电机30旋转时,头部框架332也旋转。
240.另外,电机30设置在循环旋转支架50中,并且电机30的电机轴31连接到行星齿轮装置20的太阳齿轮22。另外,循环旋转支架50固定到行星齿轮装置20的行星架25。
241.因此,当行星齿轮装置20的太阳齿轮22通过电机轴31旋转时,电机30通过循环旋转支架50旋转,并且头部框架332也旋转。换句话说,电机30和头部框架332通过循环旋转支架50同时旋转。
242.详细地,当电机30接通并且电机轴31旋转时,行星齿轮装置20的太阳齿轮22旋转。因为齿圈24由设置在主体框架331上的固定支架40固定,所以当行星齿轮装置20的太阳齿轮22旋转时,行星架25旋转。换句话说,输入到太阳齿轮22的电机30的旋转作为行星架25的旋转被输出。
243.因为循环旋转支架50固定到行星架25,所以当行星架25旋转时,循环旋转支架50一体地旋转。因为电机30固定到循环旋转支架50,所以当循环旋转支架50旋转时,电机30与循环旋转支架50一体地旋转。
244.因为电机30固定到头部框架332,所以当电机30旋转时,头部框架332与电机30一体地旋转。换句话说,当电机轴31旋转时,循环旋转支架50通过行星齿轮装置20的太阳齿轮22和行星架25旋转,使得头部框架332旋转。
245.在下文中,将参照图18和图19描述根据本公开的实施例的行星齿轮传动装置10用于机器人臂操纵器400的情况。
246.图18是示出根据本公开的实施例的使用行星齿轮传动装置的机器人臂操纵器的透视图。图19是示出根据本公开的实施例的图18的机器人臂操纵器的俯仰旋转轴的分解透视图。
247.参照图18,机器人臂操纵器400可包括多个臂部401、402、403和404、两个俯仰旋转轴410和420以及一个滚动旋转轴430。
248.第一俯仰旋转轴410可设置在第一臂部401和第二臂部402之间,并且可形成为允
许第二臂部402在垂直于第一臂部401的方向(箭头c)上以预定角度进行旋转。尽管未示出,但是第一臂部401可设置在主体上。第一臂部401可设置为相对于主体旋转。
249.第二俯仰旋转轴420可设置在第三臂部403和第四臂部404之间,并且可形成为允许第四臂部404在垂直于第三臂部403的方向(箭头d)上以预定角度进行旋转。尽管未示出,但是能够握持物体的手可布置在第四臂部404的末端处。
250.滚动旋转轴430可设置在第二臂部402和第三臂部403之间,并且可形成为允许第三臂部403围绕第二臂部402的中心轴在两个方向(箭头e)上旋转。
251.第一俯仰旋转轴410、第二俯仰旋转轴420和滚动旋转轴430可使用如上所述的根据本公开的实施例的行星齿轮传动装置10。
252.在下文中,将参照图19描述在第一俯仰旋转轴410中使用根据本公开的实施例的行星齿轮传动装置10的示例。
253.图19示出了机械臂操纵器400的第一俯仰旋转轴410,行星齿轮传动装置10被施加到该机械臂操纵器400上,在行星齿轮传动装置10中,电机30的动力被输入到太阳齿轮22,然后通过行星架25被输出,如图2、图3、图4和图5所示。
254.第二臂部402的一端可耦接到第一臂部401的一端,以相对于第一臂部401在竖直方向上以预定角度进行旋转。
255.行星齿轮传动装置10可设置在第一臂部401的一端与第二臂部402的一端之间,并且可允许第二臂部402相对于第一臂部401的一端以预定角度进行旋转。
256.参照图19,行星齿轮传动装置10可包括行星齿轮装置20、循环旋转支架50和电机30。
257.行星齿轮装置20可包括太阳齿轮22、齿圈24、多个行星齿轮23和支撑多个行星齿轮23的行星架25,并且齿圈24可固定到第一臂部401的一端。
258.详细地,齿圈24固定到固定支架40,并且固定支架40设置在第一臂部401的一端处。因为第一臂部件401的另一端设置在主体(未示出)中,所以固定支架40设置在主体中。
259.电机30设置在第二臂部402的一端。详细地,电机支架411设置在第二臂部402的一端,并且电机30固定到电机支架411。因此,当电机30旋转时,第二臂部402与电机30一体地旋转。
260.另外,电机30设置在循环旋转支架50中,并且电机30的电机轴31通过适配器60连接到行星齿轮装置20的太阳齿轮22。另外,循环旋转支架50固定到行星齿轮装置20的行星架25。
261.因此,当行星齿轮装置20的太阳齿轮22通过电机轴31旋转时,电机30通过循环旋转支架50旋转,并且第二臂部402也旋转。换句话说,电机30和第二臂部402通过循环旋转支架50同时旋转。
262.具体地,当电机30的电机轴31旋转时,行星齿轮装置20的太阳齿轮22旋转。因为齿圈24由设置在第一臂部401的一端处的固定支架40固定,所以当行星齿轮装置20的太阳齿轮22旋转时,行星架25旋转。换句话说,输入到太阳齿轮22的电机30的旋转作为行星架25的旋转被输出。
263.因为循环旋转支架50固定到行星架25,所以当行星架25旋转时,循环旋转支架50一体地旋转。因为电机30固定到循环旋转支架50,所以当循环旋转支架50旋转时,电机30与
循环旋转支架50一体地旋转。
264.因为电机30固定到第二臂部402的电机支架411,所以当电机30旋转时,第二臂部402与电机30一体地旋转。换句话说,当电机轴31旋转时,循环旋转支架50通过行星齿轮装置20的太阳齿轮22和行星架25旋转,使得第二臂部402旋转。
265.因此,在图19所示的机器人臂操纵器400的实施例中,第一臂部401用作固定行星齿轮传动装置10的主体,并且第二臂部402用作通过行星齿轮传动装置10旋转的移动构件。
266.在以上描述中,第二臂部402固定到电机30。然而,在另一个实施例中,第二臂部402可直接固定到循环旋转支架50,而不是电机30。即使在这种情况下,当循环旋转支架50旋转时,第二臂部402也旋转。
267.另一方面,在图19中,行星齿轮传动装置10被施加到机器人臂操纵器400,其中,在行星齿轮传动装置10中,电机30的动力被输入到太阳齿轮22,然后通过行星架25被输出。然而,应用于机械臂操纵器400的行星齿轮传动装置不限于此。根据上述其他实施例的行星齿轮传动装置110和210可应用于机器人臂操纵器400。
268.在下文中,将参照图20描述根据本公开实施例的行星齿轮传动装置用于机器人腰连接部500的情况。
269.图20是示出根据本公开的实施例的使用行星齿轮传动装置的机器人腰连接部的透视图。
270.参照图20,机器人腰连接部500可设置在主体下部501和主体上部502之间。机器人腰连接部500可设置为使得主体上部502相对于主体下部501在前后方向(箭头f)上以预定角度进行旋转。
271.机器人腰连接部500可包括固定板510、移动板520和设置在固定板510和移动板520之间的行星齿轮传动装置10。
272.固定板510固定到主体下部501的上端,并且移动板520固定到主体上部502的下端并设置为相对于固定板510以预定角度进行旋转。
273.行星齿轮传动装置10允许移动板520相对于固定板510以预定角度进行旋转。
274.行星齿轮装置20可包括太阳齿轮22、齿圈24、多个行星齿轮23和支撑多个行星齿轮23的行星架25,并且齿圈24可固定到固定板510。
275.详细地,齿圈24固定到固定支架40,并且固定支架40设置在固定板510的上表面上。因为固定板510设置在主体下部501的上端,所以固定支架40设置在主体下部501上。
276.电机30设置在移动板520的下表面中。因此,当电机30旋转时,移动板520与电机30一体地旋转。电机30的另一端可由支撑支架90支撑,使得移动板520可稳定地旋转。换句话说,支撑支架90可设置为在固定支架40的相对侧上可旋转地支撑电机30。
277.另外,电机30设置在循环旋转支架50中,并且电机30的电机轴31连接到行星齿轮装置20的太阳齿轮22。另外,循环旋转支架50固定到行星齿轮装置20的行星架25。
278.因此,当行星齿轮装置20的太阳齿轮22通过电机轴31旋转时,电机30通过循环旋转支架50旋转,并且移动板520也旋转。换句话说,电机30和移动板520通过循环旋转支架50同时旋转。
279.具体地,当电机30的电机轴31旋转时,行星齿轮装置20的太阳齿轮22旋转。因为齿圈24由设置在固定板510上的固定支架40固定,所以当行星齿轮装置20的太阳齿轮22旋转
时,行星架25旋转。换句话说,输入到太阳齿轮22的电机30的旋转作为行星架25的旋转被输出。
280.因为循环旋转支架50固定到行星架25,所以当行星架25旋转时,循环旋转支架50一体地旋转。因为电机30固定到循环旋转支架50,所以当循环旋转支架50旋转时,电机30与循环旋转支架50一体地旋转。
281.因为电机30固定到移动板520的下表面,所以当电机30旋转时,移动板520与电机30一体地旋转。换句话说,当电机轴31旋转时,循环旋转支架50通过行星齿轮装置20的太阳齿轮22和行星架25旋转,使得移动板520旋转。
282.因为固定板510设置在主体下部501的上端,并且移动板520设置在主体上部502的下端,所以当移动板520相对于固定板510旋转时,主体上部502相对于主体下部501以预定角度进行旋转。
283.因此,在图20所示的机器人腰连接部500的实施例中,主体下部501用作固定行星齿轮传动装置10的主体,主体上部502用作通过行星齿轮传动装置10被旋转的移动构件。
284.在以上描述中,移动板520固定到电机30。然而,作为另一实施例,移动板520可直接固定到循环旋转支架50而不是电机30。即使在这种情况下,当循环旋转支架50旋转时,移动板520也旋转。
285.另一方面,在图20中,行星齿轮传动装置10被施加到机器人腰连接部500,其中,在行星齿轮传动装置10中,电机30的动力被输入到太阳齿轮22,然后通过行星架25被输出。然而,应用于机器人腰连接部500的行星齿轮传动装置不限于此。根据上述其他实施例的行星齿轮传动装置110和210可应用于机器人腰连接部500。
286.虽然已经参照本公开的各种实施例示出和描述了本公开,但是本领域技术人员将理解,在不脱离由所附权利要求及其等同物限定的本公开的精神和范围的情况下,可在其中进行形式和细节上的各种改变。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。