1.本发明涉及工业安全技术领域,尤其涉及的是一种基于棚上棚下同步定位的高空钢结构锈蚀定位评估方法。
背景技术:
2.车站屋盖或雨棚内的钢构件容易受到金属锈蚀的影响。锈蚀严重时,部分金属构件会蚀断脱落,进而造成安全事件,甚至危及列车正常运营。雨棚上方钉的蚀断会造成遮雨板被刮飞,顶棚下方金属构件的蚀断脱落会砸中人或列车,甚至会出现线路短路,发生火灾等安全事故。如果能够及时发现并有针对性地更换锈蚀严重的金属构件,则可有效避免上述现象的发生。但是,目前市场上尚没有成熟的设备和技术能够满足这一检测需求,因此亟需开发出一种能够有效判别车站雨棚封闭空间内各种钢构件锈蚀程度的检测方法。
技术实现要素:
3.本发明所要解决的技术问题是针对现有技术的不足提供一种基于棚上棚下同步定位的高空钢结构锈蚀定位评估方法。
4.本发明的技术方案如下:
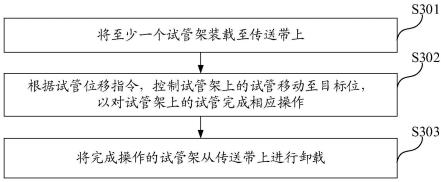
5.棚上棚下同步定位的高空钢结构锈蚀定位评估方法,基于高空钢结构锈蚀定位非接触评价系统进行钢结构锈蚀定位非接触评价,高空钢结构锈蚀定位非接触评价系统包括:雨棚上方agv智能磁吸附车载模块即屋盖自主爬行小车、雨棚下方agv智能磁吸附车载模块即吊顶吸附自主爬行小车、站台地面上同步行进的智能车载模块即地面智能保障车、数据处理及成像评估模块;吊顶吸附自主爬行小车携带的线阵探测器借助屋盖自主爬行小车携带的x射线源发出的x射线,进行棚上、棚下自主爬行小车的同步定位;该同步定位方法包括以下步骤:
6.b1,屋盖自主爬行小车在雨棚上按照预设的路线进行循线扫描,x射线源正对雨棚发射x射线;
7.b2,线阵探测器中四根相互垂直呈十字形的x射线探测器分别获取棚上x射线源释放出的穿透屋盖以后的x射线,并定位其在四根相互垂直呈十字形的x射线探测器上的四个坐标位置,该四个坐标位置构成一个圆形区域;
8.b3,计算该圆形区域的圆心相对于平板探测器中心点的位置偏差δx’和δy’,即为吊顶吸附自主爬行小车相对于屋盖自主爬行小车的位移偏差δx’和δy’;
9.b4,驱动小车和滑轨移动消除位移偏差δx’和δy’,实现棚上、棚下智能车的完全同步。
10.所述的定位评估方法,包括以下步骤:
11.a1,将屋盖自主爬行小车释放至雨棚上方,吊顶吸附自主爬行小车释放至雨棚下方,地面智能保障车放置在地面正对吊顶吸附自主爬行小车的下方;屋盖自主爬行小车、吊顶吸附自主爬行小车依靠磁吸附履带轮吸附在雨棚上下表面;
12.a2,屋盖自主爬行小车在雨棚上按照预设的路线进行循线扫描,x射线源正对雨棚发射x射线,与此同时平板探测器接收棚上x射线源释放出的穿透屋盖以后的x射线,进行雨棚封闭空间内钢结构x射线成像;屋盖自主爬行小车、吊顶吸附自主爬行小车和地面保障车工作时相互通讯,同时线阵(x射线)探测器借助棚上x射线源发出的x射线,进行棚上、棚下自主爬行小车的同步定位;
13.a3,采集平板探测器实时接收的高铁站雨棚的x射线成像信息,该信息同时包含有对应的位置和时间信息;对探测器采集到x射线原始数据,进行统计分析。
14.所述的定位评估方法,所述的统计分析方法为:x射线强度值i按大小可划分为不同的集合,对安装规整的雨棚来讲,低i集合对应的是生锈最小的区域;高i集合对应的是锈蚀程度大的地方,锈蚀蚀穿的地方i值最大;不生锈的固定厚度的钢板对x射线造成的衰减值是一定的,探测器采集到的值最小。探测器采集到x射线原始数据ii值与最小的ii值作差,可以较为准确的反算锈蚀的厚度;每个x射线值都对应着位置和时间信息,因此可圈定不同锈蚀程度的位置区域。
15.所述的定位评估方法,对大面积雨棚连续进行x射成像时,通过寻找特征点的方式对图像进行配准。
16.所述的定位评估方法,雨棚上方agv智能磁吸附车载模块采用屋盖自主爬行小车,通过磁性履带吸附在屋盖上表面,屋盖自主爬行小车搭载有运动控制模块a、通讯模块a、高精度差分gps和惯性导航单元、x射线源和云台,运动控制模块a用于控制屋盖自主爬行小车在屋盖上方与雨棚下方agv智能磁吸附车载模块、站台地面上同步行进的智能车载模块保持同步运行;依靠高精度差分gps和惯性导航进行高精度定位和自主巡航;屋盖自主爬行小车的腹部装载有一x射线源,用于正对高空钢结构雨棚发射x射线。
17.所述的定位评估方法,雨棚下方agv智能磁吸附车载模块采用为吊顶吸附自主爬行小车,通过磁性履带吸附在屋盖下表面正对屋盖自主爬行小车的位置,搭载有运动控制模块b、通讯模块b、平板探测器、线阵探测器、滑轨、摄像头和测距仪;平板探测器用于接收棚上x射线源释放出的穿透屋盖以后的x射线,进行雨棚封闭空间内钢结构x射线成像;平板探测器的四周设置有四根相互垂直呈十字形的由x射线探测器组成的线阵探测器,线阵探测器借助棚上x射线源发出的x射线,进行棚上、棚下自主爬行小车的同步定位,保证平板探测器能够实时接收到棚上小车搭载的x射线源发出的x射线。
18.所述的定位评估方法,x射线源通过云台悬挂在屋盖自主爬行小车的横梁上,云台可以保证x射线源一直处于水平的工作状态。
19.所述的定位评估方法,滑轨安装在吊顶吸附自主爬行小车的底部,为垂直于小车前进方向的横向轨道,平板探测器可以在该轨道上横向移动,以校正棚下自主爬行小车相对于棚上自主爬行小车垂直于行进方向上的位移偏差。
20.所述的定位评估方法,站台地面上同步行进的智能车载模块采用地面保障车,其上方支起一块较大的防跌落充气垫,用于缓冲雨棚下方agv智能磁吸附车载系统万一跌落时所造成的冲击。
21.x射线成像技术与agv智能磁吸附车载系统相结合,可以实现对高铁雨棚封闭空间内钢结构的x射线扫描成像。通过对拍摄图片进行智能图片差异比对和数据统计分析,有助于及时识别发生锈蚀的钢构件,并对锈蚀部分进行风险评级和定位,这对维保单位有针对
性地进行站房装修及围护结构养护、减少返工等不必要费用支出、提升管理水平、避免事故发生和减少危及旅客及列车运行安全意外事件的发生具有重要意义,有较大推广价值。
附图说明
22.图1为高空封闭空间内钢结构锈蚀定位非接触评价系统示意图;
23.10高铁站雨棚,21运动控制模块,22磁吸附履带,23x射线源,24gps,25通讯模块i,26云台,31运动控制模块,33通讯模块ii,34电池,35测距仪,36照明灯,37摄像头,38磁吸附履带,39平板探测器,40线阵探测器,42滑轨,43充气垫,44运动控制模块;
24.图2为雨棚上方智能运载系统示意图;a、b为不同角度的视图
25.图3为雨棚下方智能运载系统示意图;a顶部视图,b底部视图;
26.图4为检测流程简图;
27.图5为棚上棚下智能车同步定位方法流程图;
28.图6为x射线在线阵上的照射区域;
29.图7为棚上棚下智能车同步定位方法原理示意图;
具体实施方式
30.以下结合具体实施例,对本发明进行详细说明。
31.参考图1,高空封闭空间内钢结构锈蚀定位非接触评价系统,包括:雨棚上方agv智能磁吸附车载模块、雨棚下方agv智能磁吸附车载模块、站台地面上同步行进的智能车载模块、数据处理及成像评估模块;
32.雨棚上方agv智能磁吸附车载模块,图2为雨棚上方智能运载系统示意图,本实施例中为屋盖自主爬行小车,其在工作过程中通过磁性履带吸附在屋盖上表面,屋盖自主爬行小车搭载有运动控制模块a、通讯系统a、高精度差分gps和惯性导航单元、x射线源和云台,运动控制模块a用于控制屋盖自主爬行小车在屋盖上与雨棚下方agv智能磁吸附车载模块、站台地面上同步行进的智能车载模块保持同步运行;依靠高精度差分gps和惯性导航进行高精度定位和自主巡航;屋盖自主爬行小车的腹部装载有一个x射线源,用于x射线成像,x射线源通过云台悬挂在屋盖自主爬行小车的横梁上;云台可以保证x射线源一直处于水平的工作状态。
33.雨棚下方agv智能磁吸附车载模块,图3为雨棚下方智能运载系统示意图,本实施例中为吊顶吸附自主爬行小车,其在工作过程中通过磁性履带吸附在屋盖下表面正对屋盖自主爬行小车的位置,搭载有运动控制模块b、通讯系统和平板(x射线)探测器、线阵(x射线)探测器、滑轨、全景摄像头和测距仪。
34.平板探测器用于接收棚上x射线源释放出的穿透屋盖以后的x射线,进行雨棚钢结构x射线成像;滑轨安装在吊顶吸附自主爬行小车的底部,为垂直于小车前进方向的横向轨道,平板探测器可以在该轨道上横向移动,以校正棚下自主爬行小车相对于棚上自主爬行小车垂直于行进方向上的位移偏差;
35.平板(x射线)探测器的四周设置有四根相互垂直呈十字形的由x射线探测器组成的线阵(x射线)探测器,线阵(x射线)探测器借助棚上x射线源发出的x射线,进行棚上、棚下自主爬行小车的同步定位,保证平板探测器能够实时接收到棚上小车搭载的x射线源发出
的x射线。
36.站台地面上同步行进的智能车载模块,在本实施案例中为地面保障车,其上方支起一块较大的防跌落充气垫,用于缓冲雨棚下方agv智能磁吸附车载系统万一跌落时所造成的冲击。
37.屋盖自主爬行小车、吊顶吸附自主爬行小车和地面保障车工作时相互通讯,同步行进。棚上、棚下两套系统采用宽的磁吸附履带轮,具有较强的吸力和越障能力,而且不会掉进吊顶下方的缝隙里;站台地面上行进的小车为普通车轮,无履带。
38.三个智能车载系统即屋盖自主爬行小车、吊顶吸附自主爬行小车和地面保障车之间用无线网桥方式进行相互通讯和同步定位。
39.考虑到站棚特点和x射线成像要求,采用160kv便携式x射线源,其射线使用角度为50度,锥形发射,截面为圆截面,其半径与射线源、探测器之间的距离呈正比。
40.数据处理及成像评估模块,包括信号采集单元:采集平板探测器实时接收的高铁站雨棚的x射成像信息,该信息同时包含有对应的位置和时间信息;图像拼接单元:对大面积雨棚连续进行x射成像时,可以通过寻找特征点的方式对图像进行配准;统计分析单元:(1)对探测器采集到x射线原始数据,进行统计分析,x射线强度值i按大小可划分为不同的集合,对安装规整的雨棚来讲,低i集合对应的是生锈最小的区域;高i集合对应的是锈蚀程度大的地方,锈蚀蚀穿的地方i值最大。(2)不生锈的固定厚度的钢板对x射线造成的衰减值是一定的,探测器采集到的值最小。探测器采集到x射线原始数据ii值与最小的ii值作差,可以较为准确的反算锈蚀的厚度。(3)每个x射线值都对应着位置和时间信息,因此可圈定不同程度大小的位置区域。
41.利用上述统计分析方法或人工智能图片比对的方法,可以借助软件自动识别高铁站雨棚封闭空间内钢结构锈蚀程度,并进行定位和可视化成像,在雨棚地图上进行不同锈蚀等级圈定,对运维管理具有积极意义。
42.参考图4,高空封闭空间内钢结构锈蚀定位非接触评价方法,包括以下步骤:
43.a1,将屋盖自主爬行小车释放至雨棚上方,吊顶吸附自主爬行小车释放至雨棚下,地面智能保障车放置在地面正对吊顶吸附自主爬行小车的下方;屋盖自主爬行小车、吊顶吸附自主爬行小车依靠磁吸附履带轮吸附在雨棚上下表面;
44.a2,屋盖自主爬行小车在雨棚上按照预设的路线进行循线扫描,x射线源正对雨棚发射x射线,与此同时平板探测器接收棚上x射线源释放出的穿透屋盖以后的x射线,进行雨棚封闭空间内钢结构x射线成像;屋盖自主爬行(棚上)小车、吊顶吸附(棚下)自主爬行小车和地面保障车工作时相互通讯,同时线阵(x射线)探测器借助棚上x射线源发出的x射线,进行棚上、棚下自主爬行小车的同步定位;
45.a3,采集平板探测器实时接收的高铁站雨棚的x射成像信息,该信息同时包含有对应的位置和时间信息;对探测器采集到x射线原始数据,进行统计分析;
46.所述的统计分析方法为:x射线强度值i按大小可划分为不同的集合,对安装规整的雨棚来讲,低i集合对应的是生锈最小的区域;高i集合对应的是锈蚀程度大的地方,锈蚀蚀穿的地方i值最大;不生锈的固定厚度的钢板对x射线造成的衰减值是一定的,探测器采集到的值最小。探测器采集到x射线原始数据ii值与最小的ii值作差,可以较为准确的反算锈蚀的厚度;每个x射线值都对应着位置和时间信息,因此可圈定不同程度大小的位置区
域;
47.对大面积雨棚连续进行x射成像时,可以通过寻找特征点的方式对图像进行配准;
48.图6为x射线在线阵上的照射区域,图7为棚上棚下智能车同步定位方法原理示意图;雨棚下方智能车载系统配置有“十”字形x射线探测器阵列,两个探测器阵列组成x-y坐标系(图6,y轴平行于轨道方向,x轴垂直于轨道方向,若干个探测器依次排列在两个坐标系的刻度值上。雨棚上方智能车载系统携带的x射线源向下方呈锥形发射x射线,x射线照射到的区域为圆截面,其内的线阵探测器被x射线照射到,都有灰度值输出(图6中的圆形区域),而圆截面外的区域内的探测器未接受到x射线照射,无灰度值输出。两区域分界线与线阵分别相交于a、b、c和d四点。通过监控有无灰度值输出,可以实时捕捉到四点的坐标值,即xa、xb、yc、yd,圆心o点坐标为
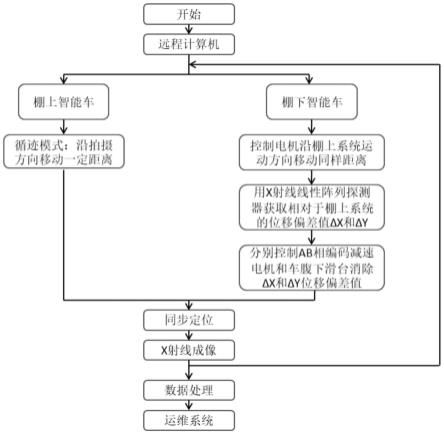
49.图5为棚上、棚下智能车同步定位方法流程图;包括以下步骤:
50.b1,屋盖自主爬行小车在雨棚上按照预设的路线进行循线扫描,x射线源正对雨棚发射x射线;
51.b2,线阵(x射线)探测器中四根相互垂直呈十字形的x射线探测器分别获取棚上x射线源释放出的穿透屋盖以后的x射线,并定位其在四根相互垂直呈十字形的x射线探测器上的四个坐标位置,四个坐标位置构成一个圆形区域;
52.b3,计算该圆形区域的圆心相对于平板探测器中心点的位置偏差δx’和δy’,即为吊顶吸附自主爬行小车相对于屋盖自主爬行小车的位移偏差δx’和δy’;
53.b4,驱动小车和滑轨移动消除位移偏差δx’和δy’,实现棚上、棚下智能车完全同步。
54.关于δx’和δy’的获取,当棚上、下车载系统同步时,棚上射线源与棚下平板探测器中心对正时(图7中的圆形区域),有:
55.xa=-xb56.yc=-yd[0057][0058][0059]
当棚上、下车载系统不同步时(图7中的灰色不连续圆),射线源与线阵x-y坐标系原点o上下不重合,假定此时在线阵上x射线照射区域与线阵x-y坐标系的交点分别为a’、b’、c’和d’,圆心为o’,那么棚下相对于棚上系统中心的偏移值δx’和δy’为:
[0060][0061][0062]
棚上智能车载系统,借助高精度差分gps完成设定检测线路的自主行进,棚下系统根据相对于棚上系统的偏差位移值,控制ab相编码减速电机直线行进相同的位移值,尽管如此仍然会产生少量的位移偏差值(δx’和δy’),δy’用ab相编码减速电机直线行进或后退来完成偏差校正,δx’用棚下车载系统腹部的滑轨移动面板和线阵探测器沿垂直轨道方
向上运动完成偏差校正。
[0063]
智能运载系统四个侧面分别有2个测距仪、1个照明灯和1个摄像头,能够实时获取车身四周影像和障碍物的距离,及时发出报警讯息。
[0064]
应当理解的是,对本领域普通技术人员来说,可以根据上述说明加以改进或变换,而所有这些改进和变换都应属于本发明所附权利要求的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。