技术特征:
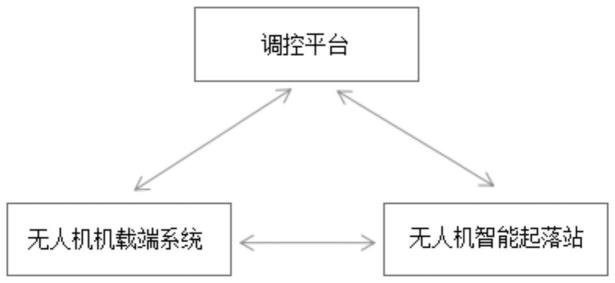
1.一种无人机自主巡检续航系统,其特征是,包括调控平台、无人机机载端系统和无人机智能起落站,其中:所述调控平台用于根据无人机状态,设置巡检任务,向相应的无人机下发飞行任务,确定向所述无人机提供充电续航的无人机智能起落站,接收并分析无人机巡检数据,以得到巡检区域特征,与无人机智能起落站双向通信;所述无人机机载端系统,搭载于无人机上,用于进行飞行和降落状态控制,和调控平台、无人机智能起落站进行数据通信;所述无人机智能起落站,包括若干个,分别设置于巡检航线不同地点上,用于接收所述调控平台的指令,开启舱门以供无人机降落,并为相应无人机提供充电服务,实现无人机续航。2.如权利要求1所述的一种无人机自主巡检续航系统,其特征是,所述调控平台,包括无人机调度平台和数据分析平台,所述无人机调度平台用于控制无人机,获取无人机状态,制定巡检任务,向无人机下发飞行任务,实现无人机巡检任务的调度;所述数据分析平台,用于接收并存储无人机巡检数据,通过分析巡检数据分析巡检区域特征。3.如权利要求1所述的一种无人机自主巡检续航系统,其特征是,所述巡检数据包括影像数据、飞行状态数据和环境监测数据。4.如权利要求1所述的一种无人机自主巡检续航系统,其特征是,所述无人机智能起落站,包括起落站本体,起落站本体内设置有数据传输模块和自主充电模块,所述数据传输模块,用于实时接收无人机以及调度平台传输数据指令;所述自主充电模块,包括充电装置,所述充电装置上设置有充电接头,充电接头上设置有充电突出槽,凸槽上设置有电池正极,所述充电装置设置有充电端,用于识别和对接电池端,完成对巡检无人机的自动充电;所述充电端设置有两个条形凹槽,凹糟中安装有电磁铁。5.如权利要求4所述的一种无人机自主巡检续航系统,其特征是,所述无人机智能起落站内置降落标志,以实现视觉引导的无人机降落,且无人机智能起落站内设置有用于储存无人机的区域;或,所述无人机智能起落站内设置有若干摄像头和探照灯,以分别用于视频获取和提高黑暗环境下充电装置与无人机的连接准确性和安全性。6.如权利要求1所述的一种无人机自主巡检续航系统,其特征是,所述无人机机载端系统具有控制模块、数据通信模块和视觉降落模块,所述控制模块与数据通信模块和视觉降落模块通信。7.如权利要求6所述的一种无人机自主巡检续航系统,其特征是,所述控制模块采用ros框架,多线程分别运行无人机视觉降落、数据通信和无人机飞行状态控制指令,以发送订阅模式实现进程间数据的实时传输;或,所述数据通信模块,包括通信模块和无线数传通信模块,所述通信模块用于将巡检数据与飞行状态数据发送至调控平台;所述无线数传通信模块作用在于无人机起飞前由机载数传通知起落站完成主体开启,开始执行巡检任务后关闭主体;巡检完成后机载数传通知开启主体,完成后关闭主体;或,所述视觉降落模块,包括摄像模块、高精度定位模块、分析模块以及激光测距模块,
高精度定位模块用于记录无人机精准位置,在降落初始阶段利用gps差分定位算法对无人机的精确连续调整;所述摄像模块,用于识别智能起落站降落标识,并获取巡检区域相关数据;所述分析模块,用于通过目标检测算法对摄像模块采集的标识进行识别,识别到相应降落标识后,计算智能起落站在图像中的相对像素坐标,根据计算坐标控制无人机水平运动至智能起落站图像正上空,直至智能起落站位于图像中央满足降落精度条件;所述激光测距模块用于测量无人机对地高度,以满足无人机视觉降落中对地测量数据的获取。8.基于权利要求1-7中任一项所述的系统的控制方法,其特征是,包括以下步骤:根据无人机状态,设置巡检任务,确定无人机的飞行任务航点,向相应的无人机下发飞行任务;确定向所述无人机在执行飞行任务时提供充电续航的无人机智能起落站,控制无人机智能起落站配合无人机,实现无人机在无人机智能起落站的降落和充电续航;接收并分析无人机巡检数据,以得到巡检区域特征。9.如权利要求8所述的控制方法,其特征是,无人机在无人机智能起落站的降落时,具体控制过程包括:对无人机进行定位,并根据起飞前记录的坐标对无人机进行x、y方向上的调整;直至检测到降落标识;利用目标检测算法对图像进行识别,识别到相应降落标志后,计算智能起落站在图像中的相对像素坐标,控制无人机水平运动至智能起落站图像正上方,直至智能起落站位于图像中央满足降落精度条件时,无人机根据预设速度进行自主下降,完成降落。10.如权利要求9所述的控制方法,其特征是,利用自适应pid算法控制无人机水平运动至智能起落站图像正上方。
技术总结
本发明提供了一种无人机自主巡检续航系统及方法,本发明集无人机控制、通信、高精度定位、视觉降落、自动充电等多功能于一体,增强了无人机系统的泛化能力,实现全自动、无人化巡检,让巡检控制和范围突破距离限制,并可实时获取所需的数据和影像形成统一监控管理,可为相关决策提供依据,大幅度提高巡检工作的效率。率。率。
技术研发人员:马思乐 王岚颢 马晓静 姜向远 栾义忠 王明慧 孙旭辉 付博文
受保护的技术使用者:山东大学
技术研发日:2022.03.01
技术公布日:2022/6/16
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。