1.本公开涉及集成电路制造技术领域,具体而言,涉及一种可以检测芯片中每种晶体管的工艺角的工艺角检测电路与工艺角检测方法。
背景技术:
2.芯片生产过程中,在同一晶圆上制造的芯片由于在晶圆上的位置不同,通常属于不同的工艺角(corner),位于不同工艺角的芯片晶体管参数也不完全相同。在设计芯片时需要考虑工艺角,以在设计阶段使各种工艺角下生产的芯片都能正常工作,这样才能使生产出的芯片可靠。
3.工艺角通常包括典型工艺角(t角,typical)、偏快工艺角(f角,fast)、偏慢工艺角(s角,slow),其中快和慢是指晶体管的延时时间短或长。对于每个芯片,每一种晶体管在制造时所处的工艺角不完全相同,为了准确检测芯片,需要分别测试一个芯片中每种晶体管的延迟时间以判断该种晶体管的工艺角。
4.相关技术中,通常采用通过检测芯片中设置的专门用于检测的环形振荡器(使用同种类p型晶体管和n型晶体管构成反相器)的电参数来检测晶体管的工艺角,但是这种方式只能确定构成环形振荡器中反相器的n型晶体管和p型晶体管的组合的延迟时间,无法准确测量该芯片中每种n型晶体管和每种p型晶体管的工艺角,无法为芯片电路分析提供更准确的测试结果。
5.需要说明的是,在上述背景技术部分公开的信息仅用于加强对本公开的背景的理解,因此可以包括不构成对本领域普通技术人员已知的现有技术的信息。
技术实现要素:
6.本公开的目的在于提供一种工艺角检测电路与工艺角检测方法,用于至少在一定程度上克服由于相关技术的限制和缺陷而导致的无法准确测量芯片中每种晶体管的工艺角的问题。
7.根据本公开的第一方面,一种工艺角检测电路,包括:设置在芯片中的m个环形振荡器(m≥1),所述m个环形振荡器的n型晶体管类型不完全相同,p型晶体管类型不完全相同,所述m个环形振荡器的晶体管类型包括所述芯片中使用的全部晶体管类型,所述环形振荡器包括对称环形振荡器和不对称环形振荡器,所述对称环形振荡器的n型晶体管种类和p型晶体管种类相同,所述不对称环形振荡器的n型晶体管种类和p型晶体管种类不同。
8.在本公开的一种示例性实施例中,第m环形振荡器的反相器均由第i种n型晶体管和第j种p型晶体管构成,m∈[1,m],i∈[1,x],j∈[1,y],x是所述芯片中n型晶体管的种类数量,y是所述芯片中p型晶体管的种类数量,m=xy。
[0009]
在本公开的一种示例性实施例中,所述芯片的全部晶体管类型包括大尺寸、一般尺寸、小尺寸对应的普通工艺n型晶体管、普通工艺p型晶体管、低阈值电压n型晶体管、低阈值电压p型晶体管、用于输入输出端口的低阈值电压n型晶体管、用于输入输出端口的低阈
值电压p型晶体管中的多种。
[0010]
在本公开的一种示例性实施例中,所述芯片还设置有与每个所述环形振荡器对应的分压检测电路,所述分压检测电路至少包括:测试p型晶体管,所述测试p型晶体管的晶体管种类与对应的环形振荡器中反相器使用的p型晶体管的晶体管种类相同,所述测试p型晶体管的源极连接电源,栅极连接第一控制信号,漏极连接分压测试点,所述第一控制信号用于控制所述测试p型晶体管导通;测试n型晶体管,所述测试n型晶体管的晶体管种类与对应的环形振荡器中反相器使用的n型晶体管的晶体管种类相同,所述测试n型晶体管的漏极连接所述分压测试点,栅极连接第二控制信号,源极接地,所述第二控制信号用于控制所述测试n型晶体管导通。
[0011]
在本公开的一种示例性实施例中,所述环形振荡器包括环形串联的偶数个反相器与一个与非门,所述与非门的晶体管类型与所述反相器的晶体管类型相同,所述与非门的第一输入端连接使能控制信号,所述与非门的第二输入端连接一个所述反相器的输出端,所述与非门的输出端连接另一个所述反相器的输入端,其中,所述使能控制信号用于控制所述环形振荡器的运行。
[0012]
根据本公开的第二方面,提供一种工艺角检测方法,应用于如上任一项所述的工艺角检测电路,包括:分别在n个芯片中检测第m个环形振荡器的实测振荡周期,以确定所述第m个环形振荡器对应的第m标准振荡周期,所述n个芯片对应同一晶圆,n≥1,m∈[1,m];根据m个所述标准振荡周期和目标芯片中m个环形振荡器的实测振荡周期来确定所述目标芯片中每种晶体管的工艺角。
[0013]
在本公开的一种示例性实施例中,所述分别在n个芯片中检测第m个环形振荡器的实测振荡周期,以确定所述第m个环形振荡器对应的第m标准振荡周期包括:获取第n个芯片中第m个环形振荡器的实测振荡周期tnm,n∈[1,n];将t1m~tnm带入预设公式以确定所述第m标准振荡周期。在本公开的一种示例性实施例中,所述预设公式为求平均值公式。
[0014]
在本公开的一种示例性实施例中,所述根据m个所述标准振荡周期确定目标芯片中每种晶体管的工艺角包括:在所述目标芯片中确定实测振荡周期等于同类环形振荡器的标准振荡周期的基准环形振荡器,所述基准环形振荡器中的反相器由第i种n型晶体管和第j种p型晶体管构成;在所述目标芯片中确定第m1环形振荡器以及第m2环形振荡器,所述第m1环形振荡器中的反相器由第i种n型晶体管和第j 1种p型晶体管构成,所述第m2环形振荡器中的反相器由第i 1种n型晶体管和第j种p型晶体管构成;获取所述第m1环形振荡器对应的第m1实测振荡周期、第m1标准振荡周期以及所述第m2环形振荡器对应的第m2实测振荡周期、第m2标准振荡周期;根据所述第m1实测振荡周期与所述第m1标准振荡周期的差值确定所述第j 1种p型晶体管的工艺角;根据所述第m2实测振荡周期与所述第m2标准振荡周期的差值确定所述第i 1种n型晶体管的工艺角。
[0015]
在本公开的一种示例性实施例中,所述芯片还设置有与每个所述环形振荡器对应的分压检测电路,所述分压检测电路至少包括:测试p型晶体管,所述测试p型晶体管的晶体管种类与对应的环形振荡器中反相器使用的p型晶体管的晶体管种类相同,所述测试p型晶体管的源极连接电源,栅极连接第一控制信号,漏极连接分压测试点,所述第一控制信号用于控制所述测试p型晶体管导通;测试n型晶体管,所述测试n型晶体管的晶体管种类与对应的环形振荡器中反相器使用的n型晶体管的晶体管种类相同,所述测试n型晶体管的漏极连
接所述分压测试点,栅极连接第二控制信号,源极接地,所述第二控制信号用于控制所述测试n型晶体管导通;所述在所述目标芯片中确定实测振荡周期等于同类环形振荡器的标准振荡周期的基准环形振荡器包括:在所述目标芯片中确定实测振荡周期等于同类环形振荡器的标准振荡周期的第m0环形振荡器;获取所述第m0环形振荡器对应的分压检测电路的所述分压测试点的电压;在所述分压测试点的电压等于所述第m0环形振荡器对应的标准分压时,将所述第m0环形振荡器确定为所述目标芯片中的所述基准环形振荡器。
[0016]
在本公开的一种示例性实施例中,所述第m0环形振荡器对应的标准分压的确定过程包括:获取所述n个芯片中所述第m0环形振荡器对应的分压检测电路的所述分压测试点的n个电压;将所述n个电压的平均值确定为所述第m0环形振荡器对应的标准分压。
[0017]
在本公开的一种示例性实施例中,所述根据所述第m1实测振荡周期与所述第m1标准振荡周期的差值确定所述第j 1种p型晶体管的工艺角包括:在所述差值为正值时,确定所述第j 1种p型晶体管的工艺角为偏慢工艺角;在所述差值为零时,确定所述第j 1种p型晶体管的工艺角为标准工艺角;在所述差值为负值时,确定所述第j 1种p型晶体管的工艺角为偏快工艺角。
[0018]
在本公开的一种示例性实施例中,所述根据所述第m2实测振荡周期与所述第m2标准振荡周期的差值确定所述第i 1种n型晶体管的工艺角包括:在所述差值为正值时,确定所述第i 1种n型晶体管的工艺角为偏慢工艺角;在所述差值为零时,确定所述第i 1种n型晶体管的工艺角为标准工艺角;在所述差值为负值时,确定所述第i 1种n型晶体管的工艺角为偏快工艺角。
[0019]
在本公开的一种示例性实施例中,所述在所述目标芯片中确定实测振荡周期等于同类环形振荡器的标准振荡周期的基准环形振荡器包括:在所述目标芯片中没有所述基准环形振荡器时,将所述目标芯片标记为工艺偏差不合格。
[0020]
本公开实施例通过在芯片中设置由不同种类的n型晶体管和p型晶体管组成的环形振荡器,可以准确测量一个芯片中不同种类的n型晶体管和p型晶体管的工艺角,为芯片检测提供有效信息。
[0021]
应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,并不能限制本公开。
附图说明
[0022]
此处的附图被并入说明书中并构成本说明书的一部分,示出了等于本公开的实施例,并与说明书一起用于解释本公开的原理。显而易见地,下面描述中的附图仅仅是本公开的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
[0023]
图1是本公开示例性实施例中工艺角检测电路的结构示意图。
[0024]
图2是本公开一个实施例中一个芯片中的环形振荡器的设置示意图。
[0025]
图3是本公开另一个实施例中环形振荡器的示意图。
[0026]
图4是本公开实施例提供的工艺角检测方法的流程图。
[0027]
图5是图4所示方法中步骤s2的子流程图。
[0028]
图6是本公开一个实施例中工艺角检测电路的示意图。
[0029]
图7是应用图6所示实施例实施图5中的步骤s21的流程图。
[0030]
图8是一个实施例中步骤s24的子流程图。
[0031]
图9是一个实施例中步骤s25的子流程图。
[0032]
图10是图8和图9所示流程的示意图。
具体实施方式
[0033]
现在将参考附图更全面地描述示例实施方式。然而,示例实施方式能够以多种形式实施,且不应被理解为限于在此阐述的范例;相反,提供这些实施方式使得本公开将更加全面和完整,并将示例实施方式的构思全面地传达给本领域的技术人员。所描述的特征、结构或特性可以以任何合适的方式结合在一个或更多实施方式中。在下面的描述中,提供许多具体细节从而给出对本公开的实施方式的充分理解。然而,本领域技术人员将意识到,可以实践本公开的技术方案而省略所述特定细节中的一个或更多,或者可以采用其它的方法、组元、装置、步骤等。在其它情况下,不详细示出或描述公知技术方案以避免喧宾夺主而使得本公开的各方面变得模糊。
[0034]
此外,附图仅为本公开的示意性图解,图中相同的附图标记表示相同或类似的部分,因而将省略对它们的重复描述。附图中所示的一些方框图是功能实体,不一定必须与物理或逻辑上独立的实体相对应。可以采用软件形式来实现这些功能实体,或在一个或多个硬件模块或集成电路中实现这些功能实体,或在不同网络和/或处理器装置和/或微控制器装置中实现这些功能实体。
[0035]
下面结合附图对本公开示例实施方式进行详细说明。
[0036]
图1是本公开示例性实施例中工艺角检测电路的结构示意图。
[0037]
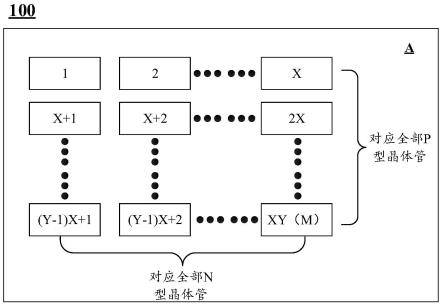
参考图1,工艺角检测电路100可以包括:
[0038]
设置在芯片a中的m(m≥1)个环形振荡器1~xy,m个环形振荡器的n型晶体管类型不完全相同,p型晶体管类型不完全相同,m个环形振荡器的晶体管类型包括芯片a中使用的全部晶体管类型,环形振荡器包括对称环形振荡器和不对称环形振荡器,对称环形振荡器的n型晶体管种类和p型晶体管种类相同,不对称环形振荡器的n型晶体管种类和p型晶体管种类不同。
[0039]
其中,第m环形振荡器的反相器均由第i种n型晶体管和第j种p型晶体管构成,m∈[1,m],i∈[1,x],j∈[1,y],x是芯片中n型晶体管的种类数量,y是芯片中p型晶体管的种类数量。
[0040]
在图1所示实施例中m=xy,x是芯片中n型晶体管的种类数量,y是芯片中p型晶体管的种类数量。在其他实施例中,m的值也可以为其他值,本公开对此不作特殊限制。
[0041]
图2是本公开一个实施例中一个芯片中的环形振荡器的设置示意图。
[0042]
参考图2,假设一个芯片a使用a1、a2、a3三种n型晶体管和b1、b2、b3三种p型晶体管时(x=3,y=3),工艺角检测电路200可以包括9(m=3*3)个环形振荡器21~29。
[0043]
每个环形振荡器包括奇数个循环串联的反相器,每个环形振荡器中的反相器均完全相同,每个反相器均由一个n型晶体管和一个p型晶体管构成。环形振荡器21中的反相器均由a1、b1晶体管构成,环形振荡器22中的反相器均由a1、b2晶体管构成,以此类推,环形振荡器23对应a1、b3晶体管,环形振荡器24对应a2、b1晶体管,环形振荡器25对应a2、b2晶体
管,环形振荡器26对应a2、b3晶体管,环形振荡器27对应a3、b1晶体管,环形振荡器28对应a3、b2晶体管,环形振荡器29对应a3、b3晶体管。
[0044]
在本公开实施例中,芯片的全部晶体管类型包括大尺寸(large)、一般尺寸(normal)、小尺寸(small)对应的普通工艺n型晶体管(nmos)、普通工艺p型晶体管(pmos)、低阈值电压n型晶体管、低阈值电压p型晶体管、用于输入输出端口的低阈值电压n型晶体管、用于输入输出端口的低阈值电压p型晶体管中的多种。
[0045]
在本公开实施例中,为简化表述,使用字母代码表示晶体管类型。将普通工艺nmos和pmos分别设置字母代码ntn和ptn,在低阈值电压晶体管的字母代码后面添加“lv”后缀,在用于输入输出端口的晶体管的字母代码后面添加“io”后缀,将晶体管尺寸small、large分别作为晶体管的字母代码后缀,normal尺寸的晶体管不作特殊标记。例如,ntnlvio-large即为大尺寸的用于输入输出端口的低阈值电压n型晶体管。
[0046]
在本公开实施例中,使用上述字母代码表述,芯片的全部晶体管类型可以包括ntn、ntn-large、ntn-small、ptn、ptn-large、ptn-small、ntnlv(xxx low vth)、ntnlv-large、ntnlv-small、ptnlv、ptnlv-large、ptnlv-small、ntnlvio、ntnlvio-large、ntnlvio-small、ptnlvio、ptnlvio-large、ptnlvio-small等等。晶体管类型的设置可以由芯片的实际设计确定,本公开不以此为限。
[0047]
本公开实施例中的环形振荡器既包括对称环形振荡器,也包括不对称环形振荡器。对称环形振荡器是指构成反相器的n型晶体管种类和p型晶体管种类相同的环形振荡器,例如由ntn和ptn构成反相器的环形振荡器、由ntnlv和ptnlv构成反相器的环形振荡器或者由ntnlv-large和ptnlv-large构成反相器的环形振荡器等;不对称环形振荡器是指构成反相器的n型晶体管种类和p型晶体管种类不同的环形振荡器,例如由ntn和ptnlv构成反相器的环形振荡器、由ntnlv和ptnlv-large构成反相器的环形振荡器或者由ntnlvio和ptnlv-small构成反相器的环形振荡器等。由于晶体管种类繁多,本公开实施例不再一一列举。在图2所示实施例中,环形振荡器21中的a1和b1既可以是相同种类的晶体管,也可以是不同种类的晶体管。
[0048]
图3是本公开另一个实施例中环形振荡器的示意图。
[0049]
参考图3,无论使用何种晶体管构成环形振荡器,在本公开实施例中,环形振荡器300可以包括环形串联的偶数个反相器31与一个与非门32,与非门32的晶体管种类与反相器31的晶体管种类相同(即与非门32与反相器31使用相同种类的p型晶体管和相同种类的n型晶体管)与非门32的第一输入端连接使能控制信号en,与非门32的第二输入端连接一个反相器的输出端,与非门32的输出端连接另一个反相器的输入端,其中,使能控制信号en用于控制环形振荡器的运行。
[0050]
为了避免环形振荡器在不被检测时起振、增加功耗,本公开实施例为环形振荡器增加起振条件。当与非门32连接的使能控制信号en为低电平时,无论第二输入端的输入信号为何,与非门32的输出端均输出高电平,整个环形振荡器无法起振;当与非门32连接的使能控制信号en为高电平时,当第二输入端的输入信号为高电平时,与非门32输出低电平,该低电平经过偶数个反相器输入到与非门32的第二输入端时仍为低电平,从而使与非门32的输出电平变更为高电平,只要使能控制信号en的状态不变,与非门32的输出电平即可呈现包括多个脉冲的振荡波,即环形振荡器300实现了起振。
[0051]
可以设置只有在检测该环形振荡器300时,才对与非门32输入高电平的使能控制信号en,以降低工艺角检测电路的功耗。图1和图2中所示的环形振荡器均可以与环形振荡器300具有相同或相似结构。
[0052]
设置了如图1~图3所示的环形振荡器后,可以根据这些环形振荡器确定目标芯片中各种类晶体管的工艺角。
[0053]
图4是本公开实施例提供的工艺角检测方法的流程图。图4所示的方法可以用于包括如图1~图3所示的工艺角检测电路的芯片。
[0054]
参考图4,工艺角检测方法400可以包括:
[0055]
步骤s1,分别在n个芯片中检测第m个环形振荡器的实测振荡周期,以确定第m个环形振荡器对应的第m标准振荡周期,n个芯片对应同一晶圆,n≥1,m∈[1,m];
[0056]
步骤s2,根据m个标准振荡周期和目标芯片中m个环形振荡器的实测振荡周期来确定目标芯片中每种晶体管的工艺角。
[0057]
由于同一晶圆制造的芯片相同(应用的晶体管种类、设置在芯片中的工艺角检测电路均相同),为了方便叙述,本公开实施例中将环形振荡器按照种类进行排序,相同种类的环形振荡器在不同芯片中的序号相同。
[0058]
在步骤s1,首先可以检测来自同一晶圆的n个芯片中,相同种类(即序号相同)的环形振荡器的实际振荡周期。例如,检测每个芯片中由ntn和ptn构成的环形振荡器的实际振荡周期。然后,将这些实际振荡周期带入预设公式,以确定该n个芯片中由ntn和ptn构成的环形振荡器对应的标准振荡周期。如果由ntn和ptn构成的环形振荡器在全部环形振荡器中的序号为m,则该标准振荡周期被称为第m标准振荡周期。步骤s1例如可以表述为获取第n个芯片中第m个环形振荡器的实测振荡周期tnm,n∈[1,n],从而得到t1m~tnm共n个实测振荡周期,将t1m~tnm带入预设公式以确定第m标准振荡周期。
[0059]
在本公开的一个实施例中,预设公式为求平均值公式。即可以将全部被测环形振荡器的实际振荡周期的平均值作为该种环形振荡器对应的标准振荡周期。在其他实施例中,也可以使用取众数、取中位数或者其他函数等形式确定标准振荡周期,本公开对此不作特殊限制。
[0060]
图5是图4所示方法中步骤s2的子流程图。
[0061]
参考图5,在一个实施例中,步骤s2可以包括:
[0062]
步骤s21,在目标芯片中确定实测振荡周期等于同类环形振荡器的标准振荡周期的基准环形振荡器,基准环形振荡器中的反相器由第i种n型晶体管和第j种p型晶体管构成;
[0063]
步骤s22,在目标芯片中确定第m1环形振荡器以及第m2环形振荡器,第m1环形振荡器中的反相器由第i种n型晶体管和第j 1种p型晶体管构成,第m2环形振荡器中的反相器由第i 1种n型晶体管和第j种p型晶体管构成;
[0064]
步骤s23,获取第m1环形振荡器对应的第m1实测振荡周期、第m1标准振荡周期以及第m2环形振荡器对应的第m2实测振荡周期、第m2标准振荡周期;
[0065]
步骤s24,根据第m1实测振荡周期与第m1标准振荡周期的差值确定第j 1种p型晶体管的工艺角;
[0066]
步骤s25,根据第m2实测振荡周期与第m2标准振荡周期的差值确定第i 1种n型晶
体管的工艺角。
[0067]
在本公开实施例中,确定目标芯片中各晶体管的工艺角首先要找到目标芯片中处于标准工艺角的晶体管,以该处于标准工艺角的晶体管作为评价其他晶体管的参照。因此,要找到包含处于标准工艺角的晶体管的基准环形振荡器,需要该基准环形振荡器的两种晶体管在生产时均位于typical corner(标准工艺角),具有满足设计需求的参数。
[0068]
在一个实施例中,可以直接将实测振荡周期等于标准振荡周期的环形振荡器确定为基准环形振荡器,因为该环形振荡器的反相器延迟时间在全部环形振荡器的反相器延迟时间之间最为标准(振荡周期等于标准振荡周期表示反相器的延迟时间等于反相器延迟时间标准值)。但是,本技术发明人在分析过程中发现,即使一个反相器的延迟时间等于反相器延迟时间标准值,也不能表示构成该反相器的n型晶体管和p型晶体管的延迟时间均为标准值,如果该反相器的n型晶体管和p型晶体管的延迟时间一个较同种类n型晶体管的标准延迟时间长,一个较同种类n型晶体管的标准延迟时间短,则二者组成的反相器的最终延时仍旧可能等于上述反相器延迟时间标准值。此时,再基于该n型晶体管或p型晶体管分析其他晶体管的延迟时间,则会产生误差。
[0069]
为了准确地确定可以作为延迟时间比较基准的n型晶体管和p型晶体管,在本公开的一个实施例中,还提供了工艺角检测电路的另一个实施例。
[0070]
图6是本公开一个实施例中工艺角检测电路的示意图。
[0071]
参考图6,在一个实施例中,芯片600还设置有与每个环形振荡器61对应的分压检测电路62,分压检测电路62至少包括:
[0072]
测试p型晶体管m1,测试p型晶体管的晶体管种类与对应的环形振荡器61中反相器使用的p型晶体管的晶体管种类相同,测试p型晶体管的源极连接电源vdd,栅极连接第一控制信号ctrl1,漏极连接分压测试点t,第一控制信号ctrl1用于控制测试p型晶体管导通;
[0073]
测试n型晶体管m2,测试n型晶体管的晶体管种类与对应的环形振荡器61中反相器使用的n型晶体管的晶体管种类相同,测试n型晶体管的漏极连接分压测试点t,栅极连接第二控制信号ctrl2,源极接地,第二控制信号ctrl2用于控制测试n型晶体管导通。
[0074]
可以在测得环形振荡器61的实测振荡振荡周期等于同类环形振荡器的标准振荡周期时,对环形振荡器61对应的分压检测电路62输入第一控制信号ctrl1(低电平)和第二控制信号ctrl2(高电平),以控制测试p型晶体管m1和测试n型晶体管m2导通。由于处于不同工艺角的晶体管的等效电阻不同,在分压测试点t处形成的分压不同,因此通过检测分压,可以确定测试p型晶体管m1和测试n型晶体管m2是否为延迟时间等于同种类晶体管标准值的基准n型晶体管和基准p型晶体管。
[0075]
图7是应用图6所示实施例实施图5中的步骤s21的流程图。
[0076]
参考图7,对于图6所示的分压检测电路,步骤s21可以包括:
[0077]
步骤s211,在目标芯片中确定实测振荡周期等于同类环形振荡器的标准振荡周期的第m0环形振荡器;
[0078]
步骤s212,获取第m0环形振荡器对应的分压检测电路的分压测试点的电压;
[0079]
步骤s213,在分压测试点的电压等于第m0环形振荡器对应的标准分压时,将第m0环形振荡器确定为目标芯片中的基准环形振荡器。
[0080]
其中,第m0环形振荡器对应的标准分压的确定过程例如可以为获取n个芯片中第
m0环形振荡器对应的分压检测电路的分压测试点的n个电压,并将n个电压的平均值确定为第m0环形振荡器对应的标准分压。在本公开其他实施例中,也可以参考标准振荡周期的确定过程中应用的预设公式来确定标准分压,本公开对此不作特殊限制。
[0081]
在一些实施例中,有可能在一个目标芯片中,找不到一个环形振荡器的实测振荡周期等于标准振荡周期,或者,实测振荡周期等于标准振荡周期的环形振荡器对应的分压测试点的电压不等于标准分压,这两种情况均可以视为目标芯片中不存在基准环形振荡器,此时可以判定该目标芯片中不存在处于标准工艺角的晶体管,将目标芯片标记为工艺偏差不合格。
[0082]
在另一些实施例中,有可能在一个目标芯片中找到多个符合上述基准环形振荡器条件的环形振荡器,此时可以任选一个符合条件的环形振荡器作为后续步骤中应用的基准环形振荡器。
[0083]
如果根据图7所示实施例能够确定目标芯片中的基准环形振荡器,可以确定该基准环形振荡器中的n型晶体管和p型晶体管的等效电阻(与延迟时间正相关)为标准值,此时可以以该基准环形振荡器中的n型晶体管(称为基准n型晶体管)和p型晶体管(称为基准p型晶体管)作为衡量其他晶体管的延迟时间是快、慢还是标准的比较基准。
[0084]
首先,在目标芯片中找到包含该基准n型晶体管的第m1环形振荡器,该第m1环形振荡器不等于上述第m环形振荡器,即第m1环形振荡器中的p型晶体管不是基准p型晶体管。此时,可以获取第m1环形振荡器的第m1实测振荡周期和第m1标准振荡周期(将n个芯片中同种类环形振荡器的实测振荡周期带入上述预设公式计算得出),确定第m1实测振荡周期与第m1标准振荡周期的差值。
[0085]
由于第m1环形振荡器使用了基准n型晶体管,因此如果第m1环形振荡器中的p型晶体管较同种类p型晶体管的延迟时间长(位于偏慢工艺角),则由基准n型晶体管与该p型晶体管构成的反相器组成的第m1环形振荡器的振荡周期较同种类环形振荡器的标准振荡周期长;同理,如果第m1环形振荡器中的p型晶体管较同种类p型晶体管的延迟时间短(位于偏快工艺角),则由基准n型晶体管与该p型晶体管构成的反相器组成的第m1环形振荡器的振荡周期较同种类环形振荡器的标准振荡周期短。因此,可以根据第m1实测振荡周期与第m1标准振荡周期的差值确定第m1环形振荡器中的p型晶体管的延迟时间是长还是短。
[0086]
图8是一个实施例中步骤s24的子流程图。
[0087]
参考图8,步骤s24可以包括:
[0088]
步骤s241,在差值为正值时,确定第j 1种p型晶体管的工艺角为偏慢工艺角;
[0089]
步骤s242,在差值为零时,确定第j 1种p型晶体管的工艺角为标准工艺角;
[0090]
步骤s243,在差值为负值时,确定第j 1种p型晶体管的工艺角为偏快工艺角。
[0091]
上述第j 1种p型晶体管泛指与上述基准p型晶体管不同种类的p型晶体管,不仅限于一种晶体管,例如可以为目标芯片应用的p型晶体管中除基准p型晶体管以外的全部种类的p型晶体管。在目标芯片的环形振荡器的数量m=xy时,基准n型晶体管与每种p型晶体管分别组合成y个环形振荡器,因可以通过测量y-1个环形振荡器(在上述y个环形振荡器中去除基准环形振荡器)的实测振荡周期与标准振荡周期的差值,确定目标芯片中每种p型晶体管的工艺角。
[0092]
然后,在目标芯片中找到包含该基准p型晶体管的第m2环形振荡器,该第m2环形振
荡器不等于上述第m环形振荡器,即第m2环形振荡器中的n型晶体管不是基准n型晶体管。此时,可以获取第m2环形振荡器的第m2实测振荡周期和第m2标准振荡周期(将n个芯片中同种类环形振荡器的实测振荡周期带入上述预设公式计算得出),确定第m2实测振荡周期与第m2标准振荡周期的差值。
[0093]
由于第m2环形振荡器使用了基准p型晶体管,因此如果第m2环形振荡器中的n型晶体管较同种类n型晶体管的延迟时间长(位于偏慢工艺角),则由基准p型晶体管与该n型晶体管构成的反相器组成的第m2环形振荡器的振荡周期较同种类环形振荡器的标准振荡周期长;同理,如果第m2环形振荡器中的n型晶体管较同种类n型晶体管的延迟时间短(位于偏快工艺角),则由基准p型晶体管与该n型晶体管构成的反相器组成的第m2环形振荡器的振荡周期较同种类环形振荡器的标准振荡周期短。因此,可以根据第m2实测振荡周期与第m2标准振荡周期的差值确定第m2环形振荡器中的n型晶体管的延迟时间是长还是短。
[0094]
图9是一个实施例中步骤s25的子流程图。
[0095]
参考图9,步骤s25可以包括:
[0096]
步骤s251,在差值为正值时,确定第i 1种n型晶体管的工艺角为偏慢工艺角;
[0097]
步骤s252,在差值为零时,确定第i 1种n型晶体管的工艺角为标准工艺角;
[0098]
步骤s253,在差值为负值时,确定第i 1种n型晶体管的工艺角为偏快工艺角。
[0099]
上述第i 1种n型晶体管泛指与上述基准n型晶体管不同种类的n型晶体管,不仅限于一种晶体管,例如可以为目标芯片应用的n型晶体管中除基准n型晶体管以外的全部种类的n型晶体管。在目标芯片的环形振荡器的数量m=xy时,基准p型晶体管与每种n型晶体管分别组合成x个环形振荡器,因可以通过测量x-1个环形振荡器(在x个环形振荡器中去除基准环形振荡器)的实测振荡周期与标准振荡周期的差值,确定目标芯片中每种n型晶体管的工艺角。
[0100]
图10是图8和图9所示流程的示意图。
[0101]
参考图10,假设在目标芯片中找到的基准环形振荡器由ntn晶体管和ptn晶体管组成,该基准环形振荡器对应的实测振荡周期为4.5ns,标准振荡周期为4.5ns,则目标芯片中的ntn晶体管为基准n型晶体管,ptn晶体管为基准p型晶体管。此时,由基准n型晶体管和其他种类的p型晶体管(例如ptnlv)构成的环形振荡器的实测振荡周期为3ns,该种环形振荡器的标准振荡周期为3.2ns,因此可以判断该ptnlv晶体管的延迟时间较标准值短,该目标芯片中的ptnlv晶体管对应的工艺角为偏快工艺角。
[0102]
综上所述,本公开实施例通过设置由不同n型晶体管和p型晶体管构成的环形振荡器,并在目标芯片中寻找基准环形振荡器来判断目标芯片中其他晶体管的工艺角,可以准确测得目标芯片中每种晶体管的工艺角;通过对应每种环形振荡器设置对应的分压电路,并检测分压测试点的电压来确定该环形振荡器是否为基准振荡器,可以避免n型晶体管与p型晶体管的延迟时间与基准值之差相互抵消带来的测量误差,提高工艺角检测的准确度。
[0103]
应当注意,尽管在上文详细描述中提及了用于动作执行的设备的若干模块或者单元,但是这种划分并非强制性的。实际上,根据本公开的实施方式,上文描述的两个或更多模块或者单元的特征和功能可以在一个模块或者单元中具体化。反之,上文描述的一个模块或者单元的特征和功能可以进一步划分为由多个模块或者单元来具体化。
[0104]
本领域技术人员在考虑说明书及实践这里公开的发明后,将容易想到本公开的其
它实施方案。本技术旨在涵盖本公开的任何变型、用途或者适应性变化,这些变型、用途或者适应性变化遵循本公开的一般性原理并包括本公开未公开的本技术领域中的公知常识或惯用技术手段。说明书和实施例仅被视为示例性的,本公开的真正范围和构思由权利要求指出。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。