1.公开的实施方式涉及陶瓷结构体、吸嘴、刀具、镊子、磨损检测器、粉体除电装置、粉体制造装置、顶销、搬运手及纤维引导件。
背景技术:
2.以往,已知通过使金属氧化物粒子分布于机械特性优异的陶瓷材料的内部而具有绝缘性与导电性之间的中间电传导性(以下也称作“半导电性”。)的陶瓷结构体(例如,参照专利文献1)。
3.在先技术文献
4.专利文献
5.专利文献1:国际公开第2009/099184号
技术实现要素:
6.实施方式的一方案的陶瓷结构体由含有导电性的金属氧化物粒子的陶瓷构成,所述陶瓷结构体具有与内部相比所述金属氧化物粒子的分布量较少的表面。
附图说明
7.图1是实施方式的吸嘴组装体的立体图。
8.图2是实施方式的吸嘴组装体的纵剖视图。
9.图3是实施方式的刀具的立体图。
10.图4是实施方式的刀具的剖视图。
11.图5是实施方式的镊子的立体图。
12.图6是实施方式的磨损检测器的立体图。
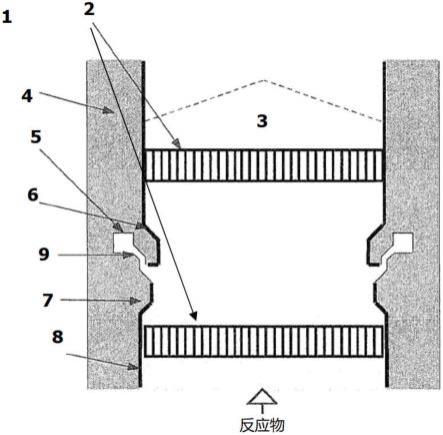
13.图7是实施方式的粉体除电装置的剖视图。
14.图8是实施方式的粉体制造装置的立体图。
15.图9是实施方式的顶销的立体图。
16.图10是图9所示的x-x线的向视剖视图。
17.图11是实施方式的搬运手的俯视图。
18.图12是作为实施方式的纤维引导件的一例的注油嘴的立体图。
19.图13是作为实施方式的纤维引导件的一例的辊式引导件的立体图。
20.图14是作为实施方式的纤维引导件的一例的杆式引导件的立体图。
21.图15是作为实施方式的纤维引导件的一例的横动引导件的立体图。
22.图16是陶瓷结构体的表面的sem观察照片。
23.图17是陶瓷结构体的内部的sem观察照片。
具体实施方式
24.以下,参照附图,来说明本技术公开的陶瓷结构体、吸嘴、刀具、镊子、磨损检测器、粉体除电装置、粉体制造装置、顶销、搬运手及纤维引导件的实施方式。需要说明的是,该公开并不由以下所示的实施方式限定。
25.以往,已知通过使金属氧化物粒子分布于机械特性优异的陶瓷材料的内部来具有绝缘性与导电性之间的中间电传导性(以下,也称作“半导电性”。)的陶瓷结构体。
26.例如通过对为了安装小片(chip)状的电子部件而使用的陶瓷的吸嘴赋予半导电性,从而在吸附有电子部件时能够将这样的电子部件所带的静电除去。
27.然而,在以往的技术中,在陶瓷结构体的表面也分布有多的金属氧化物粒子,因此存在因这样的金属氧化物粒子而陶瓷结构体的表面强度降低等问题。
28.另外,在以往的技术中,担心分布于表面的金属氧化物粒子脱离而这样的脱离后的金属氧化物粒子成为杂质(微粒:particle)。
29.于是,期待克服上述的问题点,具有半导电性,并且能够使表面的强度提高的陶瓷结构体的实现。
30.《吸嘴组装体》
31.首先,参照图1及图2来说明适用了实施方式的陶瓷结构体1的吸嘴组装体10的结构。图1是实施方式的吸嘴组装体10的立体图,图2是实施方式的吸嘴组装体10的纵剖视图。
32.如图1等所示,实施方式的吸嘴组装体10具备吸嘴11和凸缘12。吸嘴11具有大致圆筒形状,且具有贯通孔11a、吸附面11b及安装部11c。
33.贯通孔11a从吸嘴11的前端部a形成到后端部b。吸附面11b是设置于前端部a、且与吸附的电子部件相接的面。安装部11c是包含后端部b、且安装于凸缘12的部位。
34.凸缘12如图2所示具有与吸嘴11的贯通孔11a相连的连通孔12a、及内周面12b,是包含吸嘴11的后端部b而将吸嘴11的后端部b内包的筒状体。
35.而且,在实施方式的吸嘴组装体10中,凸缘12所具有的连通孔12a与吸嘴11所具有的贯通孔11a相连,由此作为用于吸附电子部件等的吸引孔发挥功能。
36.需要说明的是,所谓“内包”,凸缘12的内周面12b无需与吸嘴11的外周的全部周向对置,只要能够使吸嘴11与凸缘12组合即可,吸嘴11的后端部b侧的外周面也可以露出。
37.吸嘴11由实施方式的陶瓷结构体1构成。这样的陶瓷结构体1由含有导电性的金属氧化物粒子的陶瓷构成,具有半导电性。实施方式的陶瓷结构体1中,例如电阻值处于103(ω
·
cm)~106(ω
·
cm)的范围。
38.在此,实施方式的陶瓷结构体1具有与内部相比金属氧化物粒子的分布量较少的表面1a。这样的表面1a例如是陶瓷结构体1的烧结表面。需要说明的是,在本公开中,“金属氧化物粒子的分布量”是每单位面积的金属氧化物粒子的分布面积。
39.这样,通过使表面1a处的金属氧化物粒子的分布量比内部少,从而在这样的表面1a中与成为基材的陶瓷相比强度低的金属氧化物粒子的量少,因此能够使表面1a的强度提高。
40.例如吸嘴11中的安装部11c的表面11c1与陶瓷结构体1的表面1a对应。这样,通过使安装部11c的表面11c1处的金属氧化物粒子的分布量比内部少,能够使安装部11c的强度提高。
41.因此,根据实施方式,能够将吸嘴11牢固地安装于凸缘12。
42.另外,通过使表面1a处的金属氧化物粒子的分布量比内部少,能够使从这样的表面1a脱离的金属氧化物粒子的量降低。
43.例如吸嘴11中的贯通孔11a的内壁面11a1与陶瓷结构体1的表面1a对应。这样,通过使贯通孔11a的内壁面11a1处的金属氧化物粒子的分布量比内部少,能够抑制在吸引电子部件时金属氧化物粒子从内壁面11a1脱离。
44.因此,根据实施方式,能够抑制金属氧化物粒子在贯通孔11a内脱离而成为微粒。
45.另外,实施方式的陶瓷结构体1也可以具有金属氧化物粒子的分布量与内部大致相等的表面1b。这样的表面1b例如是将陶瓷结构体1的烧结表面研磨得到的研磨面。
46.这样,通过使表面1b处的金属氧化物粒子的分布量与内部大致相等,能够使金属氧化物粒子的分布量比作为烧结表面的表面1a多,因此能够使表面1b的电传导率比表面1a的电传导率提高。
47.例如吸嘴11的吸附面11b与陶瓷结构体1的表面1b对应。这样,通过使吸附面11b处的金属氧化物粒子的分布量与内部大致相等,能够从与吸附面11b接触的电子部件效率良好地去除静电。
48.接着,说明吸嘴11的详细情况。吸嘴11即陶瓷结构体1的主成分优选是氧化锆(zro2)、氧化铝(al2o3)、氧化锆-氧化铝复合物或碳化硅(sic)。由此,能够对陶瓷结构体1赋予高的机械特性。
49.需要说明的是,在将构成的成分的整体设为100质量%的情况下,本公开中的“主成分”是指55质量%以上。需要说明的是,“氧化锆-氧化铝复合物是主成分”是指,氧化锆和氧化铝的含量的合计是55质量%以上,不只是氧化锆的含量多,也可以是氧化铝的含量多。
50.另外,陶瓷结构体1所包含的金属氧化物粒子的主成分优选是氧化铁(fe2o3)、氧化铬(cr2o3)或氧化钛(tio2)。由此,能够对具有高的机械特性的陶瓷结构体1赋予半导电性。
51.例如在吸嘴11由导电性材料构成的情况下,从电子部件过度地去除静电,因此担心因这样的静电而产生火花。另一方面,在吸嘴11由绝缘性材料构成的情况下,完全不能从电子部件去除静电。
52.然而,在实施方式的吸嘴组装体10中,对吸嘴11适用有半导电性的陶瓷结构体1,因此能够在从吸附电子部件到将电子部件放置于电路基板的期间将所吸附的电子部件适度地除电。
53.凸缘12由例如不锈钢、铝合金等金属构件构成。需要说明的是,在吸嘴组装体10中,吸嘴11与凸缘12可以通过嵌合而一体化,也可以使用粘接剂而一体化。
54.另外,在吸嘴11与凸缘12使用粘接剂而一体化的情况下,优选对这样的粘接剂赋予导电性。由此,能够经由这样的粘接剂静从电子部件去除的静电放到凸缘12,因此能够从电子部件稳定地去除静电。
55.《刀具》
56.上述的陶瓷结构体1能够适用的对象不限定于吸嘴组装体10的吸嘴11。于是,以后的实施方式中,示出将陶瓷结构体1适用于其他各种对象的例子。
57.首先,参照图3及图4来说明适用了实施方式的陶瓷结构体1的刀具20的结构。图3是实施方式的刀具20的立体图,图4是实施方式的刀具20的剖视图。
58.需要说明的是,图3及图4示出了利用刀具20将收纳有小片状的电子部件27的电子部件收纳带23的覆盖带25切断的结构。
59.刀具20由实施方式的陶瓷结构体1构成。如图4所示,刀具20具有安装于未图示的支承机构的安装部21、以及实施了开刃加工得到的刀尖22。
60.另外,如图3所示,电子部件收纳带23由具有多个电子部件27的收纳孔28的带主体24、以及将收纳孔28包含在内地对带主体24的上部进行覆盖的覆盖带25构成。
61.而且,刀具20沿着电子部件收纳带23的搬运方向立起配置,在图3及图4中,示出了位于覆盖带25的短边方向的中央的例子,将从带主体24剥离覆盖带25的位置p用双点划线示出。需要说明的是,在切断时,优选使用覆盖带按压机构26来抑制覆盖带25的浮起。
62.接着,说明利用刀具20切断覆盖带25并将覆盖带25从带主体24剥离的工序。首先,电子部件收纳带23被搬运,由此利用刀具20的刀尖22将覆盖带25分割为2个而切断。
63.而且,该被分割为2个的覆盖带25分别由覆盖带卷取机构(未图示)卷取,由此能够将覆盖带25从带主体24剥离。
64.在此,在实施方式的刀具20中,安装部21的表面处的金属氧化物粒子的分布量比内部的金属氧化物粒子的分布量少。由此,能够使安装部21的强度提高,由此能够将刀具20牢固地安装于支承机构。
65.另外,在实施方式的刀具20中,刀尖22的表面处的金属氧化物粒子的分布量与内部的金属氧化物粒子的分布量大致相等。由此,能够使刀尖22的电传导率提高,由此能够从与刀尖22接触的电子部件收纳带23的各部分效率良好去除静电。
66.《镊子》
67.接着,参照图5来说明适用了实施方式的陶瓷结构体1的镊子30的结构。图5是实施方式的镊子30的立体图。
68.如图5所示,实施方式的镊子30具有腿部31、一对把持部32、以及多个固定构件33。腿部31以板状体从基端部31a呈两叉状延伸到一对前端部31b、且这样的一对前端部31b互相接触分离的方式进行开闭操作。腿部31由金属、塑料等构成。
69.一对把持部32分别安装于腿部31中的一对前端部31b,并通过闭合腿部31而把持物品。把持部32具有使用固定构件33而安装于腿部31的前端部31b的安装部32a、以及与所把持的物品接触的接触部32b。
70.把持部32由实施方式的陶瓷结构体1构成。而且,在实施方式的把持部32中,安装部32a的表面处的金属氧化物粒子的分布量比内部的金属氧化物粒子的分布量少。由此,能够使安装部32a的强度提高,由此能够将把持部32牢固地安装于腿部31。
71.另外,在实施方式的把持部32中,接触部32b处的金属氧化物粒子的分布量与内部的金属氧化物粒子的分布量大致相等。由此,能够使接触部32b的电传导率提高,由此能够从与接触部32b接触的物品效率良好地去除静电。
72.《磨损检测器》
73.接着,参照图6来说明适用了实施方式的陶瓷结构体1的磨损检测器40的结构。图6是实施方式的磨损检测器40的立体图。
74.磨损检测器40具备滑动体41和电阻检测器42。滑动体41由实施方式的陶瓷结构体1构成,且具有与其他物体(未图示)滑动的滑动面41a。
75.在此,在实施方式的滑动体41的滑动面41a未磨损的情况下,滑动面41a处的金属氧化物粒子的分布量比内部的金属氧化物粒子的分布量少。另一方面,在滑动面41a与其他物体滑动而磨损了的情况下,滑动面41a处的金属氧化物粒子的分布量与内部的金属氧化物粒子的分布量大致相等。
76.即,在滑动体41的滑动面41a中,由于与其他物体滑动而磨损,从而电阻变小。而且,在实施方式的磨损检测器40中,由电阻检测器42检测滑动面41a处的电阻的变化。
77.具体而言,电阻检测器42通过使多个(在图中为2个)的可动式的触针43与滑动面41a接触,来检测滑动面41a的电阻。由此,能够检测滑动面41a处的电阻的变化,由此磨损检测器40能够基于所检测出的电阻的变化,来评价滑动面41a的磨损情况。
78.《粉体除电装置》
79.接着,参照图7来说明适用了实施方式的陶瓷结构体1的粉体除电装置50的结构。图7是实施方式的粉体除电装置50的剖视图。
80.实施方式的粉体除电装置50具备保持件51、多个离子发生器(ionizer)52、配线53及电流计54。保持件51具有短管形状,且由实施方式的陶瓷结构体1构成。
81.离子发生器52是嘴(nozzle)型的离子发生器。图7的例子中,多个(在图中,为8个)的离子发生器52在保持件51的周向上以等间隔固定。另外,全部的离子发生器52由配线53电连接。
82.离子发生器52具有针电极52a,这样的针电极52a经由电阻52b而接地。需要说明的是,在比电阻52b靠接地侧设置有电流计54,该电流计54用于测定在从针电极52a的针尖发生了电晕放电时从这样的针电极52a流向接地侧的电流的值。
83.而且,使保持件51的内部流通成为除电对象的带电的粉体,并使多个离子发生器52动作。由此,由这样的多个离子发生器52产生的离子传给粉体,由此粉体除电装置50能够将粉体除电。
84.而且,在实施方式的粉体除电装置50中,保持件51由陶瓷结构体1构成,由此保持件51的表面处的金属氧化物粒子的分布量比内部的金属氧化物粒子的分布量少。
85.因此,根据实施方式,能够抑制在使带电的粉体流通时金属氧化物粒子从保持件51的表面脱离而产生微粒。
86.《粉体制造装置》
87.接着,参照图8来说明适用了实施方式的陶瓷结构体1的粉体制造装置60的结构。图8是实施方式的粉体制造装置60的立体图。
88.如图8所示,实施方式的粉体制造装置60具备研钵61、研杵62、导电性片材63及导电性线缆64。研钵61具有能够供粉末的原料65投入的凹部61a,且由实施方式的陶瓷结构体1构成。
89.另外,研钵61载置于电接地的例如由cu、al构成的导电性片材63上,研钵61的底面抵接于这样的导电性片材63。
90.研杵62用于对投入到研钵61的凹部61a的原料65混合或粉碎,且由实施方式的陶瓷结构体1构成。研杵62具有对放入研钵61的凹部61a的原料65按压的抵接部62a、以及由作业者把持的把持部62b。
91.在研杵62的把持部62b,经由导电性粘接剂、未图示的连接端子等而连接有例如由
cu构成的导电性线缆64的一端。另外,导电性线缆64的另一端经由导电性片材63而电接地。
92.而且,在实施方式的粉体制造装置60中,将放入研钵61的凹部61a的原料65由研杵62磨碎、敲碎从而粉碎,并且由研杵62将粉碎的原料65搅拌,从而能够从原料65制造粉体。
93.在此,在实施方式的粉体制造装置60中,研钵61及研杵62由具有半导电性的陶瓷结构体1构成,由此能够抑制在从原料65制造粉体时原料65、所生成的粉体带电。
94.而且,在实施方式的粉体制造装置60中,研钵61及研杵62由陶瓷结构体1构成,由此保持件51的表面处的金属氧化物粒子的分布量比内部的金属氧化物粒子的分布量少。
95.因此,根据实施方式,能够抑制在从原料65制造粉体时金属氧化物粒子从研钵61、研杵62的表面脱离而产生微粒。
96.《顶销》
97.接着,参照图9及图10来说明适用了实施方式的陶瓷结构体1的顶销70的结构。图9是实施方式的顶销70的立体图,图10是图9所示的x-x线的向视剖视图。
98.实施方式的顶销70在对晶片等的基板(未图示)实施各种处理的半导体制造装置、检查基板的表面的缺陷的半导体检查装置等中,发挥使基板从载置面分隔而支承基板的作用。如图9等所示,顶销70从与基板接触侧起依次具有前端部71、连接部72及后端部73。
99.如图10所示,前端部71具有安装于连接部72的安装部71a、以及与基板接触的接触面71b,且由陶瓷结构体1构成。这样,与基板接触的前端部71由具有半导电性的陶瓷结构体1构成,从而能够使蓄积于基板的电荷效率良好地流向外部。
100.因此,根据实施方式,能够防止基板从顶销70浮起,稳定地支承基板。
101.前端部71的安装部71a通过压入、导电性粘接剂而接合于连接部72,并在连接部72的后端面侧连续地具备呈螺纹形状的后端部73。另外,连接部72及后端部73由金属一体形成。
102.连接部72优选前端部71侧的端面的直径具有比前端部71的后端面的直径(=后端部73侧的直径)大的直径。由此,能够将半导电性陶瓷的前端部71通过压入而牢固接合于金属的连接部72。
103.而且,在前端部71与连接部72的接合中使用压入,由此与由粘接剂接合的情况相比更为牢固、且能够不丧失顶销70整体的导电性而接合。
104.在此,在实施方式的顶销70中,前端部71的安装部71a的表面处的金属氧化物粒子的分布量比内部的金属氧化物粒子的分布量少。由此,能够使安装部71a的强度提高,由此能够将前端部71进一步牢固地安装于连接部72。
105.另外,在实施方式的顶销70中,前端部71的接触面71b处的金属氧化物粒子的分布量与内部的金属氧化物粒子的分布量大致相等。由此,能够使接触面71b的电传导率提高,因此能够使蓄积于基板的电荷进一步效率良好地流向外部。
106.《搬运手》
107.接着,参照图11来说明适用了实施方式的陶瓷结构体1的搬运手80的结构。图11是实施方式的搬运手80的俯视图。
108.实施方式的搬运手80是在对晶片等的基板(未图示)实施各种处理的半导体制造装置、检查基板的表面的缺陷的半导体检查装置等中搬运基板的手。
109.搬运手80由俯视下大致y字形状的基体81构成,这样的基体81由实施方式的陶瓷
结构体1构成。而且,在搬运手80中,在基体81的载置面81a载置基板,通过从形成于这样的载置面81a的多个吸附口82吸附基板来保持基板。
110.而且,在基体81的内部形成将多个吸附口82与连接于未图示的吸引机构的吸引口83之间相连的流路84。
111.在此,实施方式中,搬运手80的基体81由陶瓷结构体1构成。这样,与基板接触的基体81由具有半导电性的陶瓷结构体1构成,从而能够使蓄积于基板的电荷效率良好地流向外部。
112.因此,根据实施方式,防止基板从搬运手80浮起,能够稳定地保持基板。
113.另外,实施方式中,流路84的内壁面处的金属氧化物粒子的分布量比内部的金属氧化物粒子的分布量少。因此,根据实施方式,能够抑制在使基板吸附时金属氧化物粒子从流路84的内壁面脱离而产生微粒。
114.另外,实施方式中,基体81的载置面81a处的金属氧化物粒子的分布量与内部的金属氧化物粒子的分布量大致相等。由此,能够使载置面81a的电传导率提高,由此能够使蓄积于基板的电荷进一步效率良好地流向外部。
115.《纤维引导件》
116.接着,参照图12~图15来说明适用了实施方式的陶瓷结构体1的纤维引导件100的结构。图12是作为实施方式的纤维引导件100的一例的注油嘴110的立体图。
117.图12所示的注油嘴110用于使滑动的纤维f附着油。如图12所示,注油嘴110具备主体部111、以及位于这样的主体部111的上部且与纤维f相接的槽状的导丝部112。该导丝部112具备导入纤维f的导入部、使纤维f附着油的附着部及送出纤维f的送出部。
118.在此,在实施方式的注油嘴110中,主体部111由陶瓷结构体1构成。这样,与纤维f接触的主体部111由具有半导电性的陶瓷结构体1构成,由此能够效率良好地去除由于纤维f滑动而产生的静电。
119.另外,在实施方式的注油嘴110中,导丝部112的表面处的金属氧化物粒子的分布量与内部的金属氧化物粒子的分布量大致相等。由此,能够使导丝部112的电传导率提高,因此能够效率良好去除由于纤维f滑动而产生的静电。
120.图13是作为实施方式的纤维引导件100的一例的辊式引导件120的立体图。图13所示的辊式引导件120一边旋转一边引导纤维f。如图13所示,辊式引导件120具备圆筒状的主体部121、以及位于这样的主体部121的侧面且与纤维f相接的v槽状的导丝部122。
121.在此,在实施方式的辊式引导件120中,主体部121由陶瓷结构体1构成。这样,与纤维f接触的主体部121由具有半导电性的陶瓷结构体1构成,由此能够效率良好地去除由于纤维f滑动而产生的静电。
122.另外,在实施方式的辊式引导件120中,导丝部122的表面处的金属氧化物粒子的分布量与内部的金属氧化物粒子的分布量大致相等。由此,能够使导丝部122的电传导率提高,由此能够效率良好地去除由于纤维f滑动而产生的静电。
123.图14是作为实施方式的纤维引导件100的一例的杆式引导件130的立体图。图14所示的杆式引导件130为了将纤维f收集成束或分离而使用。如图14所示,杆式引导件130具备圆筒状的主体部131、以及位于这样的主体部131的侧面的导丝部132。
124.在此,在实施方式的杆式引导件130中,主体部131由陶瓷结构体1构成。这样,与纤
维f接触的主体部131由具有半导电性的陶瓷结构体1构成,由此能够效率良好地去除由于纤维f滑动而产生的静电。
125.另外,在实施方式的杆式引导件130中,导丝部132的表面处的金属氧化物粒子的分布量与内部的金属氧化物粒子的分布量大致相等。由此,能够使导丝部132的电传导率提高,由此能够效率良好地去除由于纤维f滑动而产生的静电。
126.图15是作为实施方式的纤维引导件100的一例的横动引导件140的立体图。图15所示的横动引导件140使用于在圆筒状的封装件的外周卷取纤维f时的引导。如图15所示,横动引导件140具备主体部141、以及位于这样的主体部141的上部且与纤维f相接的u槽状的导丝部142。
127.在此,在实施方式的横动引导件140中,主体部141由陶瓷结构体1构成。这样,与纤维f接触的主体部141由具有半导电性的陶瓷结构体1构成,由此能够效率良好地去除由于纤维f滑动而产生的静电。
128.另外,在实施方式的横动引导件140中,导丝部142的表面处的金属氧化物粒子的分布量与内部的金属氧化物粒子的分布量大致相等。由此,能够使导丝部142的电传导率提高,由此能够效率良好地去除由于纤维f滑动而产生的静电。
129.实施例
130.以下,具体说明本公开的实施例。需要说明的是,在以下说明的实施例中,示出以氧化锆为主成分的陶瓷结构体1,但本公开并不限定于以下的实施例。
131.首先,准备作为主成分的氧化锆的粉末。而且,向所准备的氧化锆粉末中添加规定量溶剂由旋转研磨机进行预备粉碎,得到第一浆料。在此,由激光衍射式粒度分布装置(microtracbel株式公司制的microtrac粒度分布测定装置mt-3300)测定预备粉碎得到的氧化锆粉末的粒度分布,在求出累积50%粒径(d50)时,是0.190μm。
132.另外,与上述的工序并行而将作为导电性赋予剂且分布于陶瓷结构体1内的成为金属氧化物粒子的氧化铁的粉末与作为添加剂的氧化铬及氧化钛的粉末以规定的比例混合。而且,向所准备的混合粉末中添加规定量溶剂由旋转研磨机进行预备粉碎,得到第二浆料。
133.在此,由上述的激光衍射式粒度分布装置测定预备粉碎得到的混合粉末的粒度分布,在求出累积50%粒径(d50)时,是0.258μm。
134.接着,以氧化锆:氧化铁:氧化铬:氧化钛的比率成为69.6∶27.0∶3.0∶0.4(质量%)的方式调制第一浆料和第二浆料,并由旋转研磨机正式粉碎所调制的浆料。
135.在此,由上述的激光衍射式粒度分布装置测定正式粉碎得到的浆料的粒度分布,在求出累积50%粒径(d50)时,是0.235μm。
136.接着,向得到的浆料添加规定量的各种粘结剂,并通过喷雾干燥法使其干燥而得到颗粒。而且,使用所得到颗粒通过期望的成形法例如干式加压成形法、冷等静水压加压成形法等而得到期望形状的成形体。
137.接着,在大气气氛中以1300~1450℃的温度保持所得到的成形体1~3小时而烧成,由此得到本公开的陶瓷结构体1。需要说明的是,使烧成温度为1300~1450℃是由于:当烧成温度小于1300℃时,不能得到致密的烧结体,当烧成温度超过1450℃时,因粒生长而结晶粒径变大,任一方均倾向于陶瓷结构体1的机械特性降低。
138.需要说明的是,在原料粉末中、制造工序中有可能混入与上述所述的成分不同的杂质,但它们若为2.0质量份以下也可含有。
139.而且,关于所得到的试料,用sem(scanning electron microscope)观察作为烧结表面的表面1a。另外,关于所得到的试料将规定的部位研磨,将这样的研磨面视作陶瓷结构体1的内部,同样用sem观察。
140.图16是陶瓷结构体1的表面1a的sem观察照片,图17是陶瓷结构体1的内部的sem观察照片。需要说明的是,在图16及图17所示的sem观察照片中,浓色的部位示出了金属氧化物粒子。
141.如图16及图17所示可知:在实施方式的陶瓷结构体1中,具有金属氧化物粒子的分布量比内部少的表面1a。
142.推测为这是由于:将作为主成分的氧化锆粉末比其他成分(氧化铁、氧化铬及氧化钛)的粉末细粉碎后烧成,从而在表面处作为主成分的氧化锆比其他成分先烧结,由此其他成分在表面不易烧成。
143.另外,图17所示的陶瓷结构体1的内部是与作为陶瓷结构体1的研磨面的表面1b同等的状态,由此可知:表面被研磨后的陶瓷结构体1具有金属氧化物粒子的分布量与内部大致相等的表面1b。
144.以上,说明了本公开的实施方式,但本公开并不限定于上述实施方式,只要不脱离其主旨的范围,能够进行各种变更。例如上述的实施方式中,示出了在使陶瓷结构体1的表面1a露出的状态下适用于各种对象的例子,但也可以对表面1a进一步实施导电性涂覆而适用于各种对象。
145.在这样的导电性涂覆中,能够适用对dlc(类金刚石碳)、teflon(注册商标)、硅等赋予导电性成分等得到的物质。
146.由此,能够在维持陶瓷结构体1的半导电性的基础上,抑制氧化铁等含有物从表面1a脱离到外部。因此,能够在半导体制造工序、精密分析等嫌忌杂质的环境下,抑制陶瓷结构体1的含有物作为杂质而脱离。
147.另外,在该例子中,导电性成分(金属氧化物粒子)在陶瓷结构体1的表面1a沉陷,由此导电性涂覆膜进入这样的沉陷部分,因此能够得到锚定效果。
148.能够由本领域技术人员容易地导出进一步的效果、其他方案。因此,本公开更广范围的方案并不限定于如以上那样表示且表述的特定的详细内容及代表性的实施方式。因此,在不脱离由所附的技术方案及其等同物定义的总括性公开的概念的精神或范围的情况下,能够进行各种各样的变更。
149.附图标记说明:
[0150]1ꢀꢀꢀꢀꢀꢀ
陶瓷结构体
[0151]
1a、1b 表面
[0152]
10
ꢀꢀꢀꢀꢀ
吸嘴组装体
[0153]
11
ꢀꢀꢀꢀꢀ
吸嘴
[0154]
11a
ꢀꢀꢀꢀ
贯通孔
[0155]
11a1
ꢀꢀꢀ
内壁面
[0156]
11b
ꢀꢀꢀꢀ
吸附面
[0157]
11c
ꢀꢀꢀꢀ
安装部
[0158]
11c1
ꢀꢀꢀ
表面
[0159]
12
ꢀꢀꢀꢀꢀ
凸缘
[0160]
20
ꢀꢀꢀꢀꢀ
刀具
[0161]
21
ꢀꢀꢀꢀꢀ
安装部
[0162]
22
ꢀꢀꢀꢀꢀ
刀尖
[0163]
30
ꢀꢀꢀꢀꢀ
镊子
[0164]
31
ꢀꢀꢀꢀꢀ
腿部
[0165]
32
ꢀꢀꢀꢀꢀ
把持部
[0166]
32a
ꢀꢀꢀꢀ
安装部
[0167]
32b
ꢀꢀꢀꢀ
接触部
[0168]
40
ꢀꢀꢀꢀꢀ
磨损检测器
[0169]
41
ꢀꢀꢀꢀꢀ
滑动体
[0170]
41a
ꢀꢀꢀꢀ
滑动面
[0171]
42
ꢀꢀꢀꢀꢀ
电阻检测器
[0172]
50
ꢀꢀꢀꢀꢀ
粉体除电装置
[0173]
51
ꢀꢀꢀꢀꢀ
保持件
[0174]
52
ꢀꢀꢀꢀꢀ
离子发生器
[0175]
60
ꢀꢀꢀꢀꢀ
粉体制造装置
[0176]
61
ꢀꢀꢀꢀꢀ
研钵
[0177]
62
ꢀꢀꢀꢀꢀ
研杵
[0178]
70
ꢀꢀꢀꢀꢀ
顶销
[0179]
71
ꢀꢀꢀꢀꢀ
前端部
[0180]
71a
ꢀꢀꢀꢀ
安装部
[0181]
71b
ꢀꢀꢀꢀ
接触面
[0182]
80
ꢀꢀꢀꢀꢀ
搬运手
[0183]
81
ꢀꢀꢀꢀꢀ
基体
[0184]
81a
ꢀꢀꢀꢀ
载置面
[0185]
82
ꢀꢀꢀꢀꢀ
吸附口
[0186]
84
ꢀꢀꢀꢀꢀ
流路
[0187]
100
ꢀꢀꢀꢀ
纤维引导件
[0188]
110
ꢀꢀꢀꢀ
注油嘴
[0189]
111
ꢀꢀꢀꢀ
主体部
[0190]
120
ꢀꢀꢀꢀ
辊式引导件
[0191]
121
ꢀꢀꢀꢀ
主体部
[0192]
130
ꢀꢀꢀꢀ
杆式引导件
[0193]
131
ꢀꢀꢀꢀ
主体部
[0194]
140
ꢀꢀꢀꢀ
横动引导件
[0195]
141
ꢀꢀꢀꢀ
主体部。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。