基于柱面扫描体制下的mimo阵列三维成像方法及成像装置
技术领域
1.本发明属于mimo雷达信号处理和成像技术领域,具体地说,涉及一种基于柱面扫描体制下的mimo阵列三维成像方法及成像装置。
背景技术:
2.柱面扫描体制可实现对目标360度的观测,在安检及医学等领域可提供全方位的成像结果。
3.近年来,多输入多输出(multiple-input multipleoutput,mimo)雷达技术由于其诸多优点得到快速发展。其中,mimo阵列相比于单站阵列,可大幅度的减少阵元数量,具有高分辨率成像的潜力。柱面扫描体制下的mimo阵列是将mimo阵列与柱面扫描方式相结合,可实现对目标全方位高分辨的重建。mimo体制下的数据录取方式相对于单站更为复杂,因此,对该几何在近距离场景下的三维成像方法需要进一步的研究。
4.传统的距离徙动算法(range migration algorithm,rma)是基于单站数据获取模式下的成像算法,不能直接应用于mimo阵列信号的处理。在近场条件下,由于波前是球面而不是平面的,因此,在发射和接收天线之间假设虚拟相位中心的成像算法对于近场mimo重建是不准确的。
5.全息成像系统的多数重建算法为了简化推导过程忽略了距离衰减幅度项,从而推导过程引入了一定的近似,而对于近距离成像场景,忽略距离衰减的成像算法将在一定程度上影响成像质量。现有的成像算法在构建回波模型时大多忽略距离衰减幅度项,而忽略该项会一定程度上影响成像质量。
技术实现要素:
6.为了解决现有技术存在的问题,本发明提出了一种基于柱面扫描体制下的mimo阵列三维成像方法,该方法包括:
7.根据柱面扫描几何下,mimo阵列中的发射天线阵元与目标之间的距离,以及mimo阵列中的接收天线阵元与目标之间的距离,得到距离衰减因子,构建考虑距离衰减的回波模型;
8.对所述回波模型相对于发射天线阵元位置、接收天线阵元位置及方位角度变量分别作一维傅里叶变换,得到波数域回波信号;根据频谱回波信号,建立与重建目标半径相关的聚焦函数表达式;对所述聚焦函数表达式求逆后执行一维傅里叶变换,得到波数域聚焦函数;
9.根据得到的波数域回波信号和波数域聚焦函数,将二者相乘后,再进行降维重排、累积和逆傅里叶变换处理得到目标反射率图像。
10.作为上述技术方案的改进之一,所述mimo阵列是由多个发射天线阵元和多个接收天线阵元沿某一方向直线排列而成,并以半径r0作圆周运动,以实现柱面扫描,对柱面内目标区域内的目标实现观测。
11.作为上述技术方案的改进之一,所述根据柱面扫描几何下,mimo阵列中的发射天线阵元与目标之间的距离,以及mimo阵列中的接收天线阵元与目标之间的距离,得到距离衰减因子,构建考虑距离衰减的回波模型;其具体过程包括:
12.根据柱面扫描几何下,发射天线阵元之间的距离r
t
和接收天线阵元与目标之间的距离rr,得到距离衰减因子,记为1/(4πr
trr
);
13.其中,
[0014][0015]
其中,(r,θ,z)为预先建立的柱坐标系o-rθz区域中的任一点;rθz区域中的任一点;分别为mimo阵列中发射天线阵元和接收天线阵元的柱坐标系下的坐标,其中,r0为mimo阵列柱面扫描的半径;为柱面扫描过程中mimo阵列同x轴正向的夹角;z
t
、zr分别代表发射天线阵元在mimo阵列方向的坐标和接收天线阵元在mimo阵列方向的坐标;
[0016]
根据上述得到的距离衰减因子1/(4πr
trr
),构建考虑距离衰减的回波模型:
[0017][0018]
其中,为快时间波数域回波信号;其中,kr为快时间波数;σ(r,θ,z)表示待重建的目标反射率函数;j表示虚部单元;(r,θ,z)为柱坐标系o-rθz区域中的任一点。
[0019]
作为上述技术方案的改进之一,所述对回波模型相对于发射天线阵元位置、接收天线阵元位置及方位角度变量分别作一维傅里叶变换,得到波数域回波信号;其具体过程包括:
[0020]
根据回波模型,获取快时间波数域回波信号
[0021]
对快时间波数域回波信号两侧相对于发射天线阵元位置变量z
t
、接收天线阵元位置变量zr分别执行一维傅里叶变换,得到变换后的频谱回波信号
[0022][0023]
其中,k
zt
、k
zr
分别为代表变量z
t
、zr傅里叶变化后对应的波数域变量;σ(r,θ,z)表示待重建的目标反射率函数;为相对于发射天线阵元位置变量z
t
执行一维傅里叶变换操作;为相对于接收天线阵元位置变量zr执行一维傅里叶变换操作;
[0024]
利用驻定相位原理求解上式中中
[0025][0026][0027]
根据的结果得到另一表示形式下的频谱回波信号
[0028][0029]
其中,r0为mimo阵列柱面扫描的半径;σ(r,θ,z)为待重建的目标反射率函数;
[0030]
对中的角度变量执行一维傅里叶变换的操作,得到波数域回波信号sss(kr,k
θ
,k
zt
,k
zr
);
[0031]
其中,k
θ
为角度变量对应的波数域变量。
[0032]
作为上述技术方案的改进之一,根据所述频谱回波信号,建立与重建目标半径相关的聚焦函数表达式;对所述聚焦函数表达式求逆后执行一维傅里叶变换,得到波数域聚焦函数;包括:
[0033]
根据所述频谱回波信号建立半径r处聚焦函数表达式为:
[0034][0035]
对所述半径r处聚焦函数表达式求逆后相对于角度变量执行一维傅里叶变换,得到半径r处的波数域聚焦函数
[0036]
作为上述技术方案的改进之一,所述根据得到的波数域回波信号和波数域聚焦函数,将二者相乘后,再进行降维重排、累积和逆傅里叶变换处理得到目标反射率图像;其具
体过程包括:
[0037]
将所述波数域回波信号与某半径处波数域聚焦函数表达式相乘得到聚焦后的波数域回波信号;对所述聚焦后的波数域回波信号执行降维重排操作,得到降维处理后的信号;
[0038]
对所述降维处理后的信号在快时间波数上进行累积操作得到半径r处的柱面目标的二维频谱;
[0039]
对所述半径r处的柱面目标的二维频谱执行角度维和阵列维的逆傅里叶变换,得到所述半径r处的柱面目标的重建图像;
[0040]
对每个半径处的柱面目标重复上述过程得到每个半径位置处的柱面目标图像,即可得到三维目标区域的反射率图像。
[0041]
作为上述技术方案的改进之一,所述将所述波数域回波信号与某半径处波数域聚焦函数表达式相乘得到聚焦后的波数域回波信号;对所述聚焦后的波数域回波信号执行降维重排操作,得到降维处理后的信号;其具体过程包括:
[0042]
将所述波数域回波信号sss(kr,k
θ
,k
zt
,k
zr
)与半径r处波数域聚焦函数相乘,得到聚焦后的波数域回波信号表达式:
[0043][0044]
对所述聚焦后的波数域回波信号sssr(kr,k
θ
,k
zt
,k
zr
)执行降维重排操作:按照设定的色散关系kz=k
zt
k
zr
对该信号进行降维重排操作,得到降维处理后的信号其中,kz为定义的阵列向波数;
[0045][0046]
作为上述技术方案的改进之一,所述对所述降维处理后的信号在快时间波数上进行累积操作得到半径r处的柱面目标的二维频谱;对所述半径r处的柱面目标的二维频谱执行角度维和阵列维的逆傅里叶变换,得到所述半径r处的柱面目标的重建图像;其具体过程包括:
[0047]
对所述降维处理后的信号在快时间波数kr上进行累积操作得到半径处的柱面目标的二维频谱表达式:
[0048][0049]
对所述半径r处的柱面目标的二维频谱σr(k
θ
,kz)执行角度维和阵列维的逆傅里叶变换,得到半径r处的柱面目标的重建图像
[0050][0051]
本发明还提供了一种基于柱面扫描体制下的mimo阵列三维成像装置,该装置包括:回波模型构建模块、信号获取模块和图像三维重建模块;
[0052]
所述回波模型构建模块,用于根据柱面扫描几何下,mimo阵列中的发射天线阵元与目标之间的距离,以及mimo阵列中的接收天线阵元与目标之间的距离,得到距离衰减因
子,构建考虑距离衰减的回波模型;
[0053]
所述信号获取模块,所述对回波模型相对于发射天线阵元位置、接收天线阵元位置及方位角度变量分别作一维傅里叶变换,得到波数域回波信号;根据频谱回波信号,建立与重建目标半径相关的聚焦函数表达式;对所述聚焦函数表达式求逆后执行一维傅里叶变换,得到波数域聚焦函数;
[0054]
所述图像三维重建模块,用于根据得到的波数域回波信号和波数域聚焦函数,将二者相乘后,再进行降维重排、累积和逆傅里叶变换处理,得到目标反射率图像。
[0055]
本发明与现有技术相比的有益效果是:
[0056]
1、本发明的方法可有效解决对近场场景下目标的三维成像问题,与传统的时域成像算法相比大大提高的成像的效率;
[0057]
2、本发明的方法补偿了波方程中的固有因子——距离衰减项,可提高重建目标图像的动态范围。
附图说明
[0058]
图1为本发明的一种用于柱面扫描体制下的mimo阵列三维成像方法的流程图;
[0059]
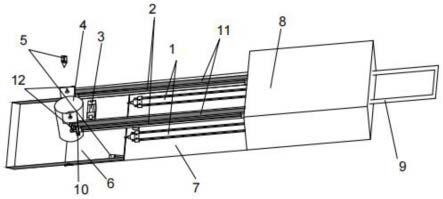
图2是本发明的柱面扫描体制下的mimo阵列成像几何的示意图;
[0060]
图3a是本发明的方法在仿真实验中的mimo阵列的排布示意图;
[0061]
图3b是本发明的方法在仿真实验中的仿真示意图;
[0062]
图4是本发明mimo阵列柱面扫描系统下对点目标的三维成像结果;
[0063]
图5a是三维成像结果的二维切面图像中的xy平面的切片图;
[0064]
图5b是三维成像结果的二维切面图像中的xz方向的切片图;
[0065]
图6是本发明的一种基于柱面扫描体制下的mimo阵列三维成像系统的结构示意图。
具体实施方式
[0066]
现结合附图对本发明作进一步的描述。
[0067]
如图1所示,本发明提供了一种基于柱面扫描体制下的mimo阵列三维成像方法,该方法适用于mimo阵列在近场场景下对柱面孔径内目标进行高分辨三维成像,采用逐个二维柱面成像堆叠的方法实现了目标的三维成像,算法过程中补偿了距离衰减项,提高了图像的质量;在建立回波模型时考虑了距离衰减幅度项,因此本发明的成像方法会一定程度上提高算法的准确度。该方法包括:
[0068]
在mimo阵列柱面扫描几何下,构建了考虑距离衰减的回波模型;
[0069]
对所述回波模型相对于发射天线阵元位置、接收天线阵元位置及方位角度变量分别作一维傅里叶变换,得到波数域回波信号;
[0070]
根据频谱回波信号,建立与重建目标半径相关的聚焦函数表达式;对所述聚焦函数表达式求逆后执行一维傅里叶变换,得到波数域聚焦函数;
[0071]
重复上述操作,遍历成像区域中所有半径即可得到完整的三维反射率图像。
[0072]
如图1所示,该方法具体包括:
[0073]
根据柱面扫描几何下,mimo阵列中的发射天线阵元与目标之间的距离,以及mimo
阵列中的接收天线阵元与目标之间的距离,得到距离衰减因子,构建考虑距离衰减的回波模型;
[0074]
具体地,根据柱面扫描几何下,发射天线阵元之间的距离r
t
和接收天线阵元与目标之间的距离rr,得到距离衰减因子,记为1/(4πr
trr
);
[0075]
其中,
[0076][0077]
其中,(r,θ,z)为预先建立的柱坐标系o-rθz区域中的任一点;rθz区域中的任一点;分别为mimo阵列中发射天线阵元和接收天线阵元的柱坐标系下的坐标,其中,r0为mimo阵列柱面扫描的半径;为柱面扫描过程中mimo阵列同x轴正向的夹角;z
t
、zr分别代表发射天线阵元在mimo阵列方向的坐标和接收天线阵元在mimo阵列方向的坐标;
[0078]
根据上述得到的距离衰减因子1/(4πr
trr
),构建考虑距离衰减的回波模型:
[0079][0080]
其中,为快时间波数域回波信号;其中,kr为快时间波数;σ(r,θ,z)表示待重建的目标反射率函数;j表示虚部单元;(r,θ,z)为柱坐标系o-rθz区域中的任一点。
[0081]
对所述回波模型相对于发射天线阵元位置、接收天线阵元位置及方位角度变量分别作一维傅里叶变换,得到波数域回波信号;
[0082]
具体地,根据回波模型,获取快时间波数域回波信号
[0083]
对快时间波数域回波信号两侧相对于发射天线阵元位置变量z
t
、接收天线阵元位置变量zr分别执行一维傅里叶变换,得到变换后的频谱回波信号
[0084][0085]
其中,k
zt
、k
zr
分别为代表变量z
t
、zr傅里叶变化后对应的波数域变量;σ(r,θ,z)表示待重建的目标反射率函数;ft
zt
为相对于发射天线阵元位置变量z
t
执行一维傅里叶变换操作;ft
zr
为相对于接收天线阵元位置变量zr执行一维傅里叶变换操作;
[0086]
利用驻定相位原理求解上式中中
[0087][0088][0089]
根据的结果得到另一表示形式下的频谱回波信号
[0090][0091]
其中,r0为mimo阵列柱面扫描的半径;σ(r,θ,z)为待重建的目标反射率函数;
[0092]
对中的角度变量执行一维傅里叶变换的操作,得到波数域回波信号
[0093]
其中,k
θ
为角度变量对应的波数域变量。
[0094]
根据频谱回波信号,建立与重建目标半径相关的聚焦函数表达式;对所述聚焦函数表达式求逆后执行一维傅里叶变换,得到波数域聚焦函数;
[0095]
具体地,根据所述频谱回波信号建立半径r处聚焦函数表达式为:
[0096][0097]
对所述半径r处聚焦函数表达式求逆后相对于角度变量执行一维傅里叶变换,得到半径r处的波数域聚焦函数
[0098]
根据得到的波数域回波信号和波数域聚焦函数,将二者相乘后,再进行降维重排、累积和逆傅里叶变换处理,得到目标反射率图像。
[0099]
具体地,将所述波数域回波信号与某半径处波数域聚焦函数表达式相乘得到聚焦后的波数域回波信号;对所述聚焦后的波数域回波信号执行降维重排操作,得到降维处理后的信号;
[0100]
具体地,将所述波数域回波信号sss(kr,k
θ
,k
zt
,k
zr
)与半径r处波数域聚焦函数相乘,得到聚焦后的波数域回波信号表达式:
[0101][0102]
对所述聚焦后的波数域回波信号sssr(kr,k
θ
,k
zt
,k
zr
)执行降维重排操作:按照设定的色散关系kz=k
zt
k
zr
进对该信号进行降维重排操作得到降维处理后的信号其中,kz为定义的阵列向波数;
[0103][0104]
对所述降维处理后的信号在快时间波数上进行累积操作得到半径r处的柱面目标的二维频谱;
[0105]
具体地,对所述降维处理后的信号在快时间波数kr上进行累积操作得到半径处的柱面目标的二维频谱表达式:
[0106][0107]
对所述半径r处的柱面目标的二维频谱执行角度维和阵列维的逆傅里叶变换,得到所述半径r处的柱面目标的重建图像;
[0108]
对每个半径处的柱面目标重复上述相乘、降维重排、累积、逆傅里叶变换等过程得到每个半径位置处的柱面目标图像,即可得到三维目标区域的反射率图像。
[0109]
具体地,对所述半径r处的柱面目标的二维频谱σr(k
θ
,kz)执行角度维和阵列维的逆傅里叶变换,得到半径r处的柱面目标的重建图像
[0110][0111]
遍历目标区域,划分n个柱面单元,对每个半径位置重复上述相乘、降维重排、累积、逆傅里叶变换等过程得到每个半径位置处的柱面目标图像,得到三维目标区域的反射率图像其中,r=rn,n=1,2,...n。
[0112]
如图2所示,所述mimo阵列是由多个发射天线阵元和多个接收天线阵元沿某一方向直线排列而成,并以半径r0作圆周运动,以实现柱面扫描,对柱面内目标区域内的目标实现观测。
[0113]
仿真实验
[0114]
1、仿真参数
[0115]
为了验证本发明方法的有效性,此处给出了表1中的仿真数据参数。
[0116]
表1仿真数据参数
[0117][0118]
2、实验内容
[0119]
在本实施例中,所述mimo阵列是由76个均匀分布的接收天线阵元和12个非均匀分布的发射天线阵元组成,如图3a所示。应用的mimo阵列和柱面扫描系统的几何示意如图3b所示。当mimo阵列位于某一方位角度位置时,发射天线阵元依次发射探测信号,对每一个发射天线阵元有全部的接收天线阵元对目标的回波信号进行接收。当所有发射天线阵元完成信号发射后,阵列运动到下一方位位置处,重复上述发射接收过程。最终整个过程会形成360度的柱面孔径。
[0120]
利用本发明的方法所获得的实验处理结果如图4、图5所示。图4为原点处,点目标的三维成像效果,图5a为散射点在xy平面的切面,图5b为散射点在xz平面的切面。从图5a和5b中可以看出本发明方法能准确重建目标位置的成像效果。
[0121]
综上所述,实验验证了本发明的正确性、有效性和可靠性。
[0122]
在另一个实施例中,如图6所示,本发明提供了一种基于柱面扫描体制下的mimo阵列三维成像装置,该装置包括:回波模型构建模块1102,信号获取模块1104和图像三维重建模块1106;
[0123]
所述回波模型构建模块1102,用于根据柱面扫描几何下,mimo阵列中的发射天线阵元与目标之间的距离,以及mimo阵列中的接收天线阵元与目标之间的距离,得到距离衰减因子,构建考虑距离衰减的回波模型;
[0124]
具体地,所述回波模型构建模块1102包括:距离衰减因子获取单元和模型构建单元;
[0125]
所述距离衰减因子获取单元,用于根据柱面扫描几何下,发射天线阵元之间的距离r
t
和接收天线阵元与目标之间的距离rr,得到距离衰减因子,记为1/(4πr
trr
);
[0126]
其中,
[0127][0128]
其中,(r,θ,z)为预先建立的柱坐标系o-rθz区域中的任一点;rθz区域中的任一点;分别为mimo阵列中发射天线阵元和接收天线阵元的柱坐标系下的坐标,其中,r0为mimo阵列柱面扫描的半径;为柱面扫描过程中mimo阵列同x轴正向的夹角;z
t
、zr分别代表发射天线阵元在mimo阵列方向的坐标和接收天线阵元在mimo阵列方向的坐标;
[0129]
所述模型构建单元,用于根据上述得到的距离衰减因子1/(4πr
trr
),构建考虑距离
衰减的回波模型:
[0130][0131]
其中,为快时间波数域回波信号;其中,kr为快时间波数;σ(r,θ,z)表示待重建的目标反射率函数;j表示虚部单元;(r,θ,z)为柱坐标系o-rθz区域中的任一点。
[0132]
所述信号获取模块1104,用于对回波模型相对于发射天线阵元位置、接收天线阵元位置及方位角度变量分别作一维傅里叶变换,得到波数域回波信号;根据频谱回波信号,建立与重建目标半径相关的聚焦函数表达式;对所述聚焦函数表达式求逆后执行一维傅里叶变换,得到波数域聚焦函数;
[0133]
具体地,所述信号获取模块1104包括:波数域回波信号获取单元和波数域聚焦函数获取单元;
[0134]
所述波数域回波信号获取单元,用于根据回波模型,获取快时间波数域回波信号
[0135]
对快时间波数域回波信号两侧相对于发射天线阵元位置变量z
t
、接收天线阵元位置变量zr分别执行一维傅里叶变换,得到变换后的频谱回波信号
[0136][0137]
其中,k
zt
、k
zr
分别为代表变量z
t
、zr傅里叶变化后对应的波数域变量;σ(r,θ,z)表示待重建的目标反射率函数;为相对于发射天线阵元位置变量z
t
执行一维傅里叶变换操作;为相对于接收天线阵元位置变量zr执行一维傅里叶变换操作;
[0138]
利用驻定相位原理求解上式中中
[0139][0140]
[0141]
根据的结果得到另一表示形式下的频谱回波信号
[0142][0143]
其中,r0为mimo阵列柱面扫描的半径;σ(r,θ,z)为待重建的目标反射率函数;
[0144]
对中的角度变量执行一维傅里叶变换的操作,得到波数域回波信号sss(kr,k
θ
,k
zt
,k
zr
);
[0145]
其中,k
θ
为角度变量对应的波数域变量。
[0146]
所述波数域聚焦函数获取单元,用于根据所述频谱回波信号建立半径r处聚焦函数表达式为:
[0147][0148]
对所述半径r处聚焦函数表达式求逆后相对于角度变量执行一维傅里叶变换,得到半径r处的波数域聚焦函数
[0149]
所述图像三维重建模块1106,用于根据得到的波数域回波信号和波数域聚焦函数,将二者相乘后,再进行降维重排、累积和逆傅里叶变换处理,得到目标反射率图像。
[0150]
具体地,所述图像三维重建模块1106包括:降维处理单元、累积处理单元和图像重建单元;
[0151]
所述降维处理单元,用于将所述波数域回波信号与某半径处波数域聚焦函数表达式相乘得到聚焦后的波数域回波信号;对所述聚焦后的波数域回波信号执行降维重排操作,得到降维处理后的信号;
[0152]
将所述波数域回波信号sss(kr,k
θ
,k
zt
,k
zr
)与半径r处波数域聚焦函数相乘,得到聚焦后的波数域回波信号表达式:
[0153][0154]
对所述聚焦后的波数域回波信号sssr(kr,k
θ
,k
zt
,k
zr
)执行降维重排操作:按照设定的色散关系kz=k
zt
k
zr
进对该信号进行降维重排操作得到降维处理后的信号其中,kz为定义的阵列向波数;
[0155][0156]
所述累积处理单元,用于对所述降维处理后的信号在快时间波数上进行累积操作得到半径r处的柱面目标的二维频谱;
[0157]
具体地,对所述降维处理后的信号在快时间波数kr上进行累积操作得到半径处的柱面目标的二维频谱表达式:
[0158][0159]
所述图像重建单元,用于对所述半径r处的柱面目标的二维频谱执行角度维和阵列维的逆傅里叶变换,得到所述半径r处的柱面目标的重建图像;
[0160]
对每个半径处的柱面目标重复上述过程得到每个半径位置处的柱面目标图像,即可得到三维目标区域的反射率图像。
[0161]
具体地,对所述半径r处的柱面目标的二维频谱σr(k
θ
,kz)执行角度维和阵列维的逆傅里叶变换,得到半径r处的柱面目标的重建图像
[0162][0163]
遍历目标区域,划分n个柱面单元,对每个半径位置重复上述过程得到每个半径位置处的柱面目标图像,得到三维目标区域的反射率图像其中,r=rn,n=1,2,...n。
[0164]
最后所应说明的是,以上实施例仅用以说明本发明的技术方案而非限制。尽管参照实施例对本发明进行了详细说明,本领域的普通技术人员应当理解,对本发明的技术方案进行修改或者等同替换,都不脱离本发明技术方案的精神和范围,其均应涵盖在本发明的权利要求范围当中。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。