1.本技术涉及飞行器控制领域,具体是一种载人飞行器训练装置及使用方法。
背景技术:
2.交通工具有多种,有一类交通工具是小型载人飞行器,例如单人或两个人的飞行器,翼装飞行器,动力三角翼等,随着科技进步,此类小型载人飞行器原来越多,例如近几年还出现一类纯电动多旋翼载人飞行器(evtol),在世界各地已经有很多验证机型载人飞上天空,具有体积小重量轻灵活容易操控的特点,给人们生活带来方便和乐趣,实现人类飞行梦想,这些种类的载人飞行器需要对驾驶员进行培训,驾驶员经过训练合格才可以安全驾驶,例如有一种载人飞行器,在人体的背部,手臂固定有喷气发动机,依靠人体控制这些喷气发动机保持身体姿态和平衡,需要预先进行很多训练才能熟练控制,以至于现在世界上只有几个人能够驾驶使用此类飞行器,现有技术是驾驶员驾驶载人飞行器从地面起飞,在空中训练,降落地面,在这个过程中,由于驾驶员对于操作载人飞行器缺乏经验,在起飞降落和空中飞行中,因为驾驶员本身不适应空中原因或气候等因素,经常出现失误危险,一旦发生就是造成机毁人亡的严重事故,因此需要改进。
技术实现要素:
3.本技术的目的是在于提供一种载人飞行器训练装置及使用方法,使驾驶员能够更安全学习驾驶载人飞行器,减少事故发生。
4.一种载人飞行器训练装置,包括训练绳,训练绳的上端固定于高处,训练绳的下端固定于载人飞行器,所述训练绳至少部分具有弹性,或/和训练绳设置有收放装置。
5.所述收放装置设置一个或多个,例如设置两个收放装置在训练绳的两端,当训练绳的上端设置收放装置的时候,收放装置设置连接在滑动装置和训练绳之间,当训练绳的下端设置收放装置的时候,收放装置设置连接在训练绳和载人飞行器之间,利用收放装置调节训练绳悬挂部分的长度,使载人飞行器可以停靠在地面,因此载人飞行器可以进行起飞,降落和在空中飞行三个阶段训练,调节训练绳的长度,可以调节载人飞行器适应训练不同阶段的需要,可以抵消载人飞行器部分重力,而使载人飞行器下落减少重力加速度,训练更安全,设置所述训练绳悬挂部分的长度使载人飞行器悬挂在空中,可以进行空中的一些训练,而不会掉下来,不会发生机毁人亡的事故。
6.所述训练绳的上端固定处设置滑动装置,所述滑动装置使训练绳的上端能够在至少一个方向移动。
7.所述滑动装置包括第一滑轮和第一滑道,所述第一滑道为滑索,滑杆或滑轨,所述第一滑轮与训练绳的上端连接,所述第一滑道固定于高处,所述第一滑轮能够沿着第一滑道上滑动。
8.所述滑动装置还设有第二滑道,所述第二滑道为滑索,滑杆或滑轨,所述第二滑道为互相平行的两个,所述第一滑道两端设置在两个互相平行的第二滑道之间,能够沿着第
二滑道滑动,所述第二滑道设置方向与第一滑道垂直,所述第二滑道设置在高处。
9.所述收放装置包括收放轮,训练绳卷绕在所述收放轮,所述收放轮依靠弹性扭簧或/和电动装置转动,所述收放装置固定于载人飞行器和训练绳之间,能够用弹性扭簧或电动装置收放训练绳,改变训练绳悬挂部分的长度和对于载人飞行器的拉力。
10.所述电动装置设有电源,电机和控制器,电源连接控制器,控制器连接电机,所述控制器设有遥控装置,使用遥控装置通过控制器驱动电机,电机驱动收放轮转动,收放训练绳,改变训练绳悬挂部分的长度,使载人飞行器降落地面或悬挂空中,电机和收放轮之间可以设置变速机构,例如行星齿轮。
11.所述收放装置设置拉力传感器,当训练绳的上端设置收放装置的时候,所述拉力传感器设置在滑动装置和收放装置之间,当训练绳的下端设置收放装置的时候,所述拉力传感器设置在载人飞行器和收放装置之间,拉力传感器与控制器电连接,所述拉力传感器检测滑动装置和收放装置之间的拉力,或训练绳和载人飞行器之间的拉力,输出信号给控制器,其设置方法为,当拉力传感器检测到拉力小于第一设定值,控制器驱动电机转动收卷减少训练绳长度,当拉力传感器检测到拉力大于第一设定值而小于第二设定值,控制器驱动电机不动保持训练绳长度不变,当拉力传感器检测到拉力大于第二设定值,控制器驱动电机转动释放增加训练绳长度,当拉力传感器检测到拉力大于第三设定值,控制器驱动电机刹车,固定训练绳长度或减缓训练绳释放长度速度,减少载人飞行器下落危险,所述第三设定值大于第二设定值,所述第二设定值大于第一设定值。
12.可以设置所述第一设定值大于0而小于载人飞行器的重力,所述第二设定值约等于载人飞行器的重力,所述第三设定值大于载人飞行器重力。
13.所述收放装置设有锁止机构,当载人飞行器下落速度过快的时候,锁止机构锁止或减缓训练绳拉出,防止载人飞行器超速下落,在载人飞行器下落速度减缓或向上运动的时候,所述锁止机构能够释放训练绳,即锁止机构具有阻尼和锁止至少其中一项功能;例如采用现有汽车安全带一样的锁止结构,或上述收放装置中的电动装置等,可以同时使用多种锁止结构增加安全性,采用上述收放装置中的电动装置实现锁止的方法是,通过控制器控制给予电机施加电流,增加电机定子和转子之间励磁磁阻的阻力,实现锁止功能。
14.在载人飞行器和收放装置中,或载人飞行器和收放装置附近设置加速度传感器,所述加速度传感器与收放装置的控制器电连接,所述加速度传感器检测载人飞行器的运行加速度或/和收放装置的收放轮转动加速度,输出信号给控制器,当检测到载人飞行器的运行加速度或/和收放轮的转动加速度超过设定值,控制器给予电机施加电流,通过增加电机定子和转子之间励磁磁阻的阻力,实现锁止功能,防止载人飞行器失控产生危险。
15.载人飞行器与训练绳或收放装置的连接固定位置,可以根据不同载人飞行器的结构不同而设置在不同位置,可以设置在载人飞行器的重心附近位置。
16.本技术的有益效果在于:采用本技术所述的一种载人飞行器训练装置及使用方法,能够在驾驶员真正驾驶载人飞行器上天空之前,对于驾驶员驾驶载人飞行器有一个熟悉适应过程,模拟在空中的实际情况,在上下,左右和前后多个方向运行,让驾驶员对于载人飞行器找到感觉,然后不依靠训练绳飞行。
附图说明
17.图1为本技术的一种载人飞行器训练装置实施例1示意图;图2为本技术的一种载人飞行器训练装置实施例2示意图;图3为本技术的一种载人飞行器训练装置实施例滑轮部分结构示意图;图4为本技术的一种载人飞行器训练装置实施例3示意图;图5为本技术的一种载人飞行器训练装置实施例3滑轨部分示意图;图6为本技术的一种载人飞行器训练装置实施例3滑轨部分示意图;图7为本技术的一种载人飞行器训练装置收放装置连接实施例示意图;图8为本技术的一种载人飞行器训练装置收放装置示意图;图9为本技术的一种载人飞行器训练装置收放装置示意图;图10为本技术的一种载人飞行器训练装置电机部分示意图;图中1-载人飞行器,2-收放装置,3-训练绳,4-第一滑道,5
ꢀ–
第一滑轮,6-第二滑道,7-第二滑轮,8-滑轨8,9-滑轨滑轮,10-拉力传感装置,11-导轮,12-收放轮,13-电源,14-控制器,15-变速装置,16-框架,17-行星轮,18-外轮,19-电机转子,20-太阳轮,21-收放轮轴。
具体实施方式
18.下面结合具体实施例,进一步阐述本技术,图1为本技术的一种载人飞行器训练装置实施例1示意图,图中载人飞行器1通过收放轮2与训练绳3下端连接,训练绳3上端连接第一滑轮5,第一滑轮5在第一滑道4上滑动,滑道4至少两端固定在高处,训练绳3具有弹性不容易拉断,配合收放轮2对于训练绳3的收放,一起发挥作用,当载人飞行器向上运动的时候,训练绳3依靠弹性收缩减少长度,收放轮2收卷训练绳3减少训练绳3的长度,两者作用使训练绳一直处于紧张状态,避免训练绳3松弛缠绕载人飞行器1,当载人飞行器1沿着第一滑道4两端之间的方向运动的时候,第一滑轮5在第一滑道上跟随滑动,通过这样设置,训练绳3始终有一个拉力给予载人飞行器1,帮助载人飞行器1在一个合适的范围内运动,收放轮2可以采用跟汽车安全带一样的设置,或采用电动电机驱动收放轮2转动,训练绳3可以采用橡胶材料制作,第一滑轮5采用质量较轻的尼龙滑轮,第一滑道4采用钢丝绳或尼龙绳等,也可以采用硬质杆。
19.图2为本技术的一种载人飞行器训练装置实施例2示意图,图中载人飞行器1通过收放轮2与训练绳3下端连接,训练绳3上端连接第一滑轮5,第一滑轮5在第一滑道4上滑动,第一滑道4两端通过第二滑轮7连接在互相平行的第二滑道6上,第二滑轮7能够在第二滑道6上滑动,第二滑轮7与第一滑道4之间设置转轴或万向节,使第二滑轮7能够相对于第一滑道4转动,因此第一滑道4能够相对于第二滑道6移动,训练绳3具有弹性不容易拉断,配合收放轮2对于训练绳3的收放,一起发挥作用,当载人飞行器向上运动的时候,训练绳3依靠弹性收缩减少长度,收放轮2收卷训练绳3减少训练绳3的长度,两者作用使训练绳一直处于紧张状态,避免训练绳3松弛缠绕载人飞行器1,当载人飞行器1沿着第一滑道4两端之间的方向运动的时候,第一滑轮5在第一滑道上跟随滑动,当载人飞行器1沿着第二滑道6的两端之间的方向运动的时候,第一滑道4跟随移动,第二滑道6采用钢丝绳或尼龙绳,第二滑轮7采用尼龙滑轮,因此实现载人飞行器1在上下,左右和前后多个方向的运动。
20.图3为本技术一种载人飞行器训练装置实施例第一滑轮5的结构示意图;图中第一滑轮5连接训练绳3,第一滑道4穿过第一滑轮5内。
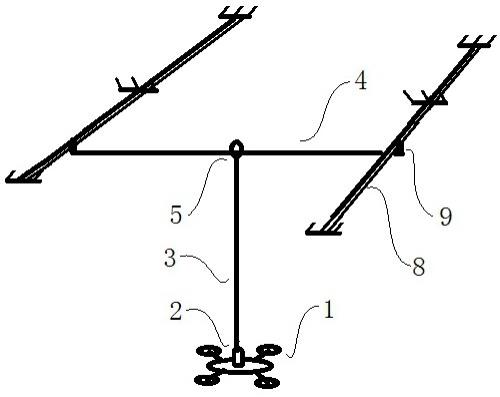
21.图4为本技术的一种载人飞行器训练装置实施例3示意图,图中载人飞行器1通过收放轮2与训练绳3下端连接,训练绳3上端连接第一滑轮5,第一滑轮5在第一滑道4上滑动,滑道4两端通过滑轨滑轮9连接在滑轨8上,滑轨滑轮9能够在滑轨8上滑动,滑轨8至少两端固定于高处,滑轨滑轮9与第一滑道4之间设置转轴或万向节,使滑轨滑轮9能够相对于第一滑道4转动,因此第一滑道4能够相对于滑轨8移动,训练绳3具有弹性不容易拉断,配合收放轮2对于训练绳3的收放,一起发挥作用,当载人飞行器向上运动的时候,训练绳3依靠弹性收缩减少长度,收放轮2收卷训练绳3减少训练绳3的长度,两者作用使训练绳一直处于紧张状态,避免训练绳3松弛缠绕载人飞行器1,当载人飞行器1沿着第一滑道4两端之间的方向运动的时候,第一滑轮5在第一滑道4上跟随滑动,当载人飞行器1沿着滑轨两端之间的方向运动的时候,第一滑道4通过滑轨滑轮9在滑轨8上跟随滑动,实现载人飞行器1在上下,左右和前后多个方向的运动。
22.图5为本技术的一种载人飞行器训练装置实施例3滑轨部分示意图;图中滑轨8采用工字型截面结构,滑轨8固定于高处,滑轨滑轮9包裹滑轨8,滑轨滑轮9下端连接第一滑道4,在滑轨滑轮9和第一滑道4之间设置转轴或万向节。
23.图6为本技术的一种载人飞行器训练装置实施例3滑轨部分示意图;本附图中两条互相平行的滑轨8设置第一滑道4的两端,第一滑道4通过滑轨滑轮9连接滑轨8,第一滑道4和滑轨滑轮9之间设置转轴或万向节,使第一滑道4和滑轨滑轮9之间互相活动连接,第一滑轮5可以在第一滑道4上滑动。
24.图7为本技术的一种载人飞行器训练装置收放装置连接实施例示意图;图中收放装置2设置连接在载人飞行器1 和训练绳3之间。
25.图8为本技术的一种载人飞行器训练装置收放装置示意图;本附图是收放装置2设置在训练绳3与载人飞行器之间的情况,图中训练绳3经过设置在收放装置2的框架16上的导轮11进入收放装置2内,训练绳3卷绕在收放轮12上,收放轮12一端通过收放轮轴21设置在框架16上,收放轮12另一端与变速装置连接,变速装置采用行星齿轮,包括太阳轮20,行星轮17和外轮18,外轮18与收放轮12连接,太阳轮20与电机转子19连接,电机固定在框架16,在收放装置2的框架16内还设置电源13和控制器14,控制器14 分别与电源13和电机电连接,在收放装置2的下部设置拉力传感装置10,所述拉力传感装置10与控制器14 电连接,拉力传感装置10下端与载人飞行器1连接,载人飞行器1与收放装置2之间拉力发生变化,拉力传感装置10产生变形,输出电信号给控制器14,控制器14驱动电机作用于收放轮12,收放轮12卷绕收放训练绳3控制载人飞行器1高度。
26.图9为本技术的一种载人飞行器训练装置收放装置示意图;本附图9是收放装置2设置在训练绳3的上端,与第一滑道4连接部分的示意图,图中训练绳3经过设置在收放装置2的框架16上的导轮11进入收放装置2内,训练绳3卷绕在收放轮12上,收放轮12一端通过收放轮轴21设置在框架16上,收放轮12另一端与变速装置连接,变速装置采用行星齿轮,包括太阳轮20,行星轮17和外轮18,外轮18与收放轮12连接,太阳轮20与电机转子19连接,电机固定在框架16,在收放装置2的框架16内还设置电源13和控制器14,控制器14 分别与电源13和电机电连接,在收放装置2的上部设置拉力传感装置10,所述拉力传感装置10与控制器
14 电连接,拉力传感装置10上端与第一滑轮5连接,第一滑道4穿过两个第一滑轮5,设置两个第一滑轮5可以使收放装置2更稳定连接第一滑道4,收放装置2与第一滑轮5之间拉力发生变化,拉力传感装置10产生变形,输出电信号给控制器14,控制器14驱动电机作用于收放轮12,收放轮12卷绕收放训练绳3控制载人飞行器1高度。
27.图10为本技术的一种载人飞行器训练装置电机部分示意图;图中电机固定在收放装置2的框架16上,电机的转子19与行星变速的太阳轮20连接,太阳轮20 通过行星轮17啮合外轮18,外轮18 连接收放轮12,收放轮12通过收放轮轴21设置在收放装置2的框架16上。
28.在上述各种本技术的实施例中,仅通过所选的实施例对本技术进行了说明,例如附图中各个部件之间的尺寸比例不能用于限定本技术,行星齿轮等变速机构有多种变速比例和结构,在本技术附图中用于说明其原理,上述的实施例用于说明而不是用于限定本技术。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
