1.本发明涉及桥梁安防技术,具体涉及一种基于可变焦热像云台的桥梁防撞主动预警监测系统及方法。
背景技术:
2.目前,随着内河水运能力增强的同时,桥梁船撞风险提高,传统被动式防撞设备仅能在事故发生后,于一定程度上降低船撞事故的灾害程度。于是,桥梁防撞主动预警系统应运而生,桥梁防撞系统首要解决的两个问题就是,船舶的超高预警和船舶的偏航预警,对于船舶的超高和偏航预警的问题,业内的普遍方法有激光对射、激光雷达、ais、微波雷达、可见光相机、热像仪成像等方法,其中,热像仪成像因其环境适用性较强,应用较为普遍。
3.但是,传统的热像仪成像系统采用定焦无热化镜头,同时为了覆盖整个监控水域,采用较大视场角的近焦镜头,这就带来了该系统作用距离近的问题。
技术实现要素:
4.本发明的主要目的在于提供一种基于可变焦热像云台的桥梁防撞主动预警监测系统及方法,设置一套桥梁防撞主动预警系统的方案,解决了宽阔水域无法架设激光对射装置时,使用定焦镜头热像仪或激光雷达作用距离短,或覆盖范围小的问题。
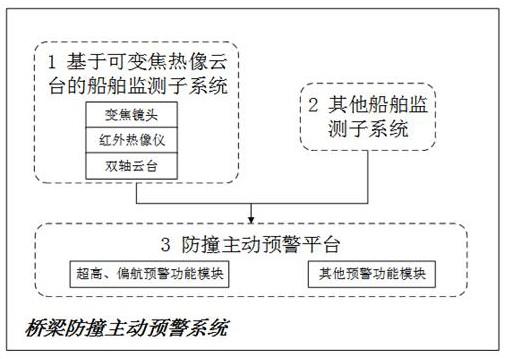
5.根据本发明的一个方面,提供了一种桥梁防撞主动预警监测系统,包括基于可变焦热像云台的船舶监测子系统、其他船舶监测子系统及主动防撞预警平台;所述基于可变焦热像云台的船舶监测子系统连接其他船舶监测子系统,并分别连接主动防撞预警平台。
6.进一步地,所述其他船舶监测子系统包括但不限于雷达、ais、高清摄像机中的一种或多种。
7.更进一步地,所述基于可变焦热像云台的船舶监测子系统由双轴云台、红外热像仪、可变焦镜头组成。
8.根据本发明的又一个方面,提供了一种桥梁防撞主动预警监测方法,包括:通过调整云台热像仪的安装高度,保证当热像仪视轴水平时,与通航限位高度重合;控制俯仰轴处于水平状态,控制方位轴在设定的范围内执行扫描动作,通过对成像界面进行智能图像分析,用于发现船舶目标,当发现船舶目标后,对目标进行锁定,控制变焦镜头至远焦模式,待热像仪自动对焦清晰后,对目标船舶进行超高分析,通过对虚拟超高线下部和上部的图像特征进行同步性对比分析,若同步性高于阈值则可认为目标船舶超高,可触发超高预警信号;同时,该系统也可接收其他子系统发布的目标船舶信息,根据所发布信息的方位特征,直接锁定目标并完成对焦;对目标船舶进行超高分析。
9.进一步地,所述的桥梁防撞主动预警监测方法,还包括:防撞主动预警平台执行监测时,通过基于可变焦热像云台的船舶监测子系统和其他船舶监测子系统对覆盖范围内的船舶目标进行监测,监测到船舶目标后,均通过1调整云台角度、变倍焦距、对焦清晰度等操作锁定目标船舶,通过图像分析的方法判断船舶目标是
否超高或偏航,具体包括如下步骤:步骤1)进入超高监测模式;步骤2)控制云台实现水平方向上的往复式摆扫;步骤3)对热像仪图像进行分析,搜索船舶目标;步骤4)判断有无发现船舶目标,若未发现船舶目标则判断有无其余子系统报告船舶目标;步骤5)若发现船舶目标则根据图像识别到的目标尺寸,调整镜头变倍至合适焦距;若其余子系统报告船舶目标则依据所上报船舶目标的尺寸参数,变倍至合适焦距;步骤6)根据图像自动对焦,或根据上报目标距离,对焦至合适位置;步骤7)超高与偏航分析计算,通过虚拟超高线上下的目标同步性进行超高分析,通过视觉定位进行偏航分析;步骤8)若未超高或偏航则进行下一轮监测,若超高或偏航则启动超高或偏航预警动作。
10.更进一步地,所述的桥梁防撞主动预警监测方法,还包括:定期进行校准补偿,补偿过程完全自动化,校准补偿成功后,自动保存记录校准结果,若校准失败,则会通知系统校准异常,具体包括如下步骤:步骤1)进入超高补偿模式;步骤2)控制云台至补偿预置点,对准基准目标;步骤3)控制变倍到最大焦距,实现最大空间分辨率;步骤4)对基准目标对焦清晰;步骤5)计算当前虚拟超高线相对于基准目标的偏移量,;步骤6)判断偏移量是否安全,将实际与偏移量安全阈值相比较,若小于阈值则为安全,否则为危险;步骤7)若安全则进行虚拟超高线的补偿,若危险则报告异常;步骤8)判断虚拟超高线是否安全,虚拟超高线补偿后,仍需与设定的安全阈值进行比较,若小于阈值则为安全,否则为危险;步骤9)若安全则保存补偿参数,若危险则报告异常;步骤10) 退出超高补偿模式。
11.本发明的优点:本发明将现有的主动预警系统超高监测设备简化,过程简化,预警距离有效延伸,达到远距离提前预警的目的,即使所述系统因外部因素发生了超高线偏移的情况,也无需对设备进行硬件校准或复位操作,只需对虚拟超高线进行一定范围的偏移量补偿即可。
12.除了上面所描述的目的、特征和优点之外,本发明还有其它的目的、特征和优点。下面将参照图,对本发明作进一步详细的说明。
附图说明
13.构成本技术的一部分的附图用来提供对本发明的进一步理解,本发明的示意性实施例及其说明用于解释本发明,并不构成对本发明的不当限定。
14.图1是本发明的系统工作原理框图;
图2是本发明的可变焦热像仪作用范围示意图;图3是本发明的目标船舶监测图像分析流程图;图4是本发明的虚拟超高线偏移补偿过程流程图。
15.附图标记:1为基于可变焦热像云台的船舶监测子系统、2为其他船舶监测子系统及3为防撞主动预测平台。
具体实施方式
16.为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
17.本发明中提供了系统原理框图,根据图1所示,基于可变焦热像云台的船舶监测子系统1和其他船舶监测子系统2同属于防撞主动预测平台3的目标船舶监测子系统,基于可变焦热像云台的船舶监测子系统1通过基于热像的图像分析寻找船舶目标,其他船舶监测子系统2通过包含但不限于毫米波、激光、可见光图像分析、甚高频通讯等方式监测目标船舶。其中基于可变焦热像云台的船舶监测子系统1由双轴云台、红外热像仪、可变焦镜头组成,具有全天候工作、灵敏度高、作用距离远、覆盖范围广、成像清晰等特点,具体作用范围如图2所示;根据成像原理,目标探测距离的计算公式如下所示:所示::目标探测距离:目标尺寸:空间分辨率(瞬时视场角):视场角:对应分辨率:像元间距(像元尺寸):镜头焦距当观测摄像机确定时,其像元尺寸为定值,当观测目标确定后,其目标尺寸为定值,此时,目标探测距离与镜头焦距成正比关系,与视场角成反比关系,意味着使用长焦模式可以在更远的距离实现目标监测,可提前发现异常情况并发布预警动作,从而为预警动作的发布争取到时间和距离优势。
18.热像仪的作用范围同时取决于目标探测距离和视场角,但无论是长焦模式还是短焦模式下,水平视场角都无法覆盖整个水域,造成监测死角,如图2所示,长焦模式下的监测区域为a1,短焦模式下的监测区域为a2,通过对热像仪配合云台功能,云台可带动热像仪实现水平方向转动,带有云台功能的监测区域为a3,因此通过配备云台,可实现全桥区水域的无死角监测。
19.防撞主动预警平台执行监测时,通过基于可变焦热像云台的船舶监测子系统1和其他船舶监测子系统2对覆盖范围内的船舶目标进行监测,监测到船舶目标后,均通过1调整云台角度、变倍焦距、对焦清晰度等操作锁定目标船舶,通过图像分析的方法判断船舶目标是否超高或偏航,具体流程如图3所示,包括如下步骤:步骤1)进入超高监测模式;步骤2)控制云台实现水平方向上的往复式摆扫;步骤3)对热像仪图像进行分析,搜索船舶目标;步骤4)判断有无发现船舶目标,若未发现船舶目标则判断有无其余子系统报告船舶目标;步骤5)若发现船舶目标则根据图像识别到的目标尺寸,调整镜头变倍至合适焦距;若其余子系统报告船舶目标则依据所上报船舶目标的尺寸参数,变倍至合适焦距。
20.步骤6) 根据图像自动对焦,或根据上报目标距离,对焦至合适位置;步骤7)超高与偏航分析计算,通过虚拟超高线上下的目标同步性进行超高分析,通过视觉定位进行偏航分析;步骤8)若未超高或偏航则进行下一轮监测,若超高或偏航则启动超高或偏航预警动作;因为机械磨损等外界因素,虚拟超高线可能与实际通航高度出现偏差,因此需要定期进行校准补偿,补偿过程完全自动化,校准补偿成功后,自动保存记录校准结果,若校准失败,则会通知系统校准异常。具体流程如图4所示,包括如下步骤:步骤1)进入超高补偿模式;步骤2)控制云台至补偿预置点,对准基准目标;步骤3)控制变倍到最大焦距,实现最大空间分辨率;步骤4)对基准目标对焦清晰;步骤5)计算当前虚拟超高线相对于基准目标的偏移量,;步骤6)判断偏移量是否安全,将实际与偏移量安全阈值相比较,若小于阈值则为安全,否则为危险;步骤7)若安全则进行虚拟超高线的补偿,若危险则报告异常;步骤8)判断虚拟超高线是否安全,虚拟超高线补偿后,仍需与设定的安全阈值进行比较,若小于阈值则为安全,否则为危险;步骤9)若安全则保存补偿参数,若危险则报告异常;步骤10) 退出超高补偿模式;本发明的一种基于可变焦热像云台的桥梁防撞预警监测系统,采用可变焦热像云台对监控水域的船舶进行监测,借助其镜头可变焦的特点,可有效延长热像仪的作用距离,同时,将热像仪安装在双轴云台上,可以补偿其在长焦模式下视场角较小的问题。本系统可极大的提高桥梁主动防撞预警系统的作用距离和作用角度范围,为船舶的诱导动作争取空间和时间优势。
21.以上所述仅为本发明的较佳实施例,并不用以限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。