1.本发明涉及喷涂机器人技术领域,更具体地涉及一种大范围工作的喷涂机器人。
背景技术:
2.喷涂机器人又叫喷漆机器人,是可进行自动喷漆或喷涂其他涂料的工业机器人,喷漆机器人主要由机器人本体、计算机和相应的控制系统组成,液压驱动的喷漆机器人还包括液压油源,如油泵、油箱和电机等,喷漆机器人一般采用液压驱动,具有动作速度快、防爆性能好等特点,可通过手把手示教或点位示数来实现示教,喷漆机器人广泛用于汽车、仪表、电器、搪瓷等工艺生产部门。
3.在实际的使用过程中喷涂机器人的使用时会造成极大的问题首先在进行喷涂时,特别是大面积的物件进行喷涂时就会导致在进行喷涂时会存在较大的问题,常常需要进行多次喷涂,才能达到喷涂效果,会造成涂料浪费,时间长等问题,因此需要一种能够进行大面积喷涂的喷涂机器人。
技术实现要素:
4.为了克服现有技术的上述缺陷,本发明提供了一种大范围工作的喷涂机器人,以解决上述背景技术中存在的问题。
5.本发明提供如下技术方案:一种大范围工作的喷涂机器人,包括机器人主体,所述机器人主体的机械臂底端固定连接有涂料输送杆,所述涂料输送杆远离机器人主体的一端固定连接有喷涂装置,所述喷涂装置包括有喷涂主体以及喷涂辅块,所述喷涂主体的顶端以及底端两侧均设有电动转向铰链,所述喷涂主体通过电动转向铰链与喷涂辅块进行活动连接,所述喷涂主体以及喷涂辅块的表面均密集排列设有喷头,所述喷涂主体靠近涂料输送杆的一侧固定连接有主体壳,所述喷涂辅块靠近涂料输送杆的一侧固定连接有辅块壳,所述主体壳以及辅块壳位于喷头所在的位置均开设有流出孔。
6.进一步的,所述喷涂主体位于每竖排的喷头所在的位置设有限流装置,所述喷涂主体位于限流装置处均开设有活动槽,所述限流装置包括有两个相互对称的限流块,所述限流块的内侧位于每个喷头所在的位置均开设有限流夹槽,所述限流块的中部均活动套接有插销,所述插销固定连接在喷涂主体的活动槽内,所述限流块的外侧均固定连接有拉力弹簧的一端,所述限流块位于拉力弹簧的一端为顶端,所述限流块的底端外侧均设有推动弹簧,所述推动弹簧的一端抵在喷涂主体的活动槽内,所述推动弹簧的另一端抵在限流块的底端外侧,所述喷涂辅块内也设有限流装置且结构功能相同,通过这样的设置能够使得在实际的使用过程中由于受到重力的作用下在进行涂料运输过程中位于底端的涂料的压强较大,这就会导致喷涂不均匀的问题,通过使用推动弹簧的推力以及拉力弹簧的拉力的相互作用下,使得在实际的喷涂作业中,从而能够通过限流装置的限流夹槽之间的夹紧程度来改变流入量,从而达到流速均等的问题,从而确保喷涂均匀。
7.进一步的,所述主体壳的中部开设有汇流槽,所述主体壳位于汇流槽的顶端以及
底端均开设有主体出流槽,每个竖排所述流出孔均与该竖排所在的主体出流槽进行配合,通过这样的设置能够使得流入到汇流槽内的涂料能够均质的进入到主体出流槽内从而进行喷涂。
8.进一步的,所述辅块壳的中部开设有辅块出流槽,所述辅块壳靠近主体壳的位置均开设有辅块接流槽,所述主体壳的汇流槽处设有管路,所述主体壳的管路通过辅块接流槽直接接入辅块出流槽。
9.进一步的,所述喷头以及流出孔内连接有软质涂料输送小管,所述喷头以及流出孔所连接的软质输送小管的均穿过两个限流块的限流夹槽。
10.进一步的,所述所述电动转向铰链的顶端均设有电机,所述电动转向铰链的电机驱动电动转向铰链进行旋转,所述电动转向铰链可进行八十五度旋转。
11.进一步的,所述限流块的限流夹槽最顶端与底端的直径之比为十一比十所述限流块的顶端到底端的限流夹槽的直径大小之按顺序逐渐递减,从而确保限流块的流速控制能够使得上下间的重力变化均考虑到。
12.本发明的技术效果和优点:
13.1.本发明通过设有电动转向铰链,有利于在进行工作时,可以根据需求来改变喷涂辅块的位置,特别是进行大面积非均质的物件进行喷涂时,则可以通过使用电动转向铰链的电机进行转动,就会导致喷涂辅块受到电动转向铰链的作用下进行旋转,直至旋转到合适的角度,亦可不需要使用电动转向铰链对喷涂辅块进行改变角度,此时进行喷涂。
14.2.本发明通过设有限流装置,有利于当输送导致主体出流槽堆积满后,会通过软质输送管穿过流出孔到达限流装置处,限流装置的顶端由于插销、拉力弹簧以及推动弹簧的作用下产生的拉力导致限流块顶端的限流夹槽的阻力最小,而限流装置底端的软质输送管受到插销、拉力弹簧以及推动弹簧的作用下产生的推力导致限流块底端的限流夹槽的阻力最大,从而会流速变慢,同时其余部位也会相应发生变化从而产生均质为喷涂流量,从而进行大面积喷涂。
附图说明
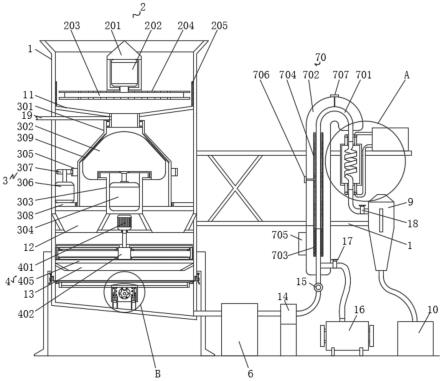
15.图1为本发明的整体结构安装示意图。
16.图2为本发明的整体结构示意图。
17.图3为本发明的整体结构分解示意图。
18.图4为本发明的喷涂装置结构示意图。
19.图5为本发明的主体壳以及辅块壳结构示意图。
20.图6为本发明的喷涂主体剖面结构示意图。
21.图7为本发明的限流装置结构示意图。
22.图8为本发明的主体壳以及辅块壳剖面结构示意图。
23.附图标记为:1、机器人主体;2、涂料输送杆;3、喷涂装置;301、喷涂主体;3011、主体壳;3012、汇流槽;3013、主体出流槽;302、喷涂辅块;3021、辅块壳;3022、辅块出流槽;3023、辅块接流槽;303、电动转向铰链;304、喷头;305、流出孔;306、限流装置;3061、限流块;3062、限流夹槽;3063、插销;3064、拉力弹簧;3065、推动弹簧。
具体实施方式
24.下面将结合本发明中的附图,对本发明中的技术方案进行清楚、完整地描述,另外,在以下的实施方式中记载的各结构的形态只不过是例示,本发明所涉及的大范围工作的喷涂机器人并不限定于在以下的实施方式中记载的各结构,在本领域普通技术人员在没有做出创造性劳动的前提下所获得的所有其他实施方式都属于本发明保护的范围。
25.参照图1-8,本发明提供了一种大范围工作的喷涂机器人,包括机器人主体1,机器人主体1的机械臂底端固定连接有涂料输送杆2,涂料输送杆2远离机器人主体1的一端固定连接有喷涂装置3,喷涂装置3包括有喷涂主体301以及喷涂辅块302,喷涂主体301的顶端以及底端两侧均设有电动转向铰链303,喷涂主体301通过电动转向铰链303与喷涂辅块302进行活动连接,喷涂主体301以及喷涂辅块302的表面均密集排列设有喷头304,喷涂主体301靠近涂料输送杆2的一侧固定连接有主体壳3011,喷涂辅块302靠近涂料输送杆2的一侧固定连接有辅块壳3021,主体壳3011以及辅块壳3021位于喷头304所在的位置均开设有流出孔305。
26.其中,喷涂主体301位于每竖排的喷头304所在的位置设有限流装置306,喷涂主体301位于限流装置306处均开设有活动槽,限流装置306包括有两个相互对称的限流块3061,限流块3061的内侧位于每个喷头304所在的位置均开设有限流夹槽3062,限流块3061的中部均活动套接有插销3063,插销3063固定连接在喷涂主体301的活动槽内,限流块3061的外侧均固定连接有拉力弹簧3064的一端,限流块3061位于拉力弹簧3064的一端为顶端,限流块3061的底端外侧均设有推动弹簧3065,推动弹簧3065的一端抵在喷涂主体301的活动槽内,推动弹簧3065的另一端抵在限流块3061的底端外侧,喷涂辅块302内也设有限流装置306且结构功能相同,通过这样的设置能够使得在实际的使用过程中由于受到重力的作用下在进行涂料运输过程中位于底端的涂料的压强较大,这就会导致喷涂不均匀的问题,通过使用推动弹簧3065的推力以及拉力弹簧3064的拉力的相互作用下,使得在实际的喷涂作业中,从而能够通过限流装置306的限流夹槽3062之间的夹紧程度来改变流入量,从而达到流速均等的问题,从而确保喷涂均匀。
27.其中,主体壳3011的中部开设有汇流槽3012,主体壳3011位于汇流槽3012的顶端以及底端均开设有主体出流槽3013,每个竖排流出孔305均与该竖排所在的主体出流槽3013进行配合,通过这样的设置能够使得流入到汇流槽3012内的涂料能够均质的进入到主体出流槽3013内从而进行喷涂。
28.其中,辅块壳3021的中部开设有辅块出流槽3022,辅块壳3021靠近主体壳3011的位置均开设有辅块接流槽3023,主体壳3011的汇流槽3012处设有管路,主体壳3011的管路通过辅块接流槽3023直接接入辅块出流槽3022。
29.其中,喷头304以及流出孔305内连接有软质涂料输送小管,喷头304以及流出孔305所连接的软质输送小管的均穿过两个限流块3061的限流夹槽3062。
30.其中,电动转向铰链303的顶端均设有电机,电动转向铰链303的电机驱动电动转向铰链303进行旋转,电动转向铰链303可进行八十五度旋转。
31.其中,限流块3061的限流夹槽3062最顶端与底端的直径之比为十一比十限流块3061的顶端到底端的限流夹槽3062的直径大小之按顺序逐渐递减,从而确保限流块3061的流速控制能够使得上下间的重力变化均考虑到。
32.本发明工作原理:
33.s1、在进行工作时,首先先启动机器人主体1,当需要进行喷涂时,可以根据需求来改变喷涂辅块302的位置,特别是进行大面积非均质的物件进行喷涂时,则可以通过使用电动转向铰链303的电机进行转动,就会导致喷涂辅块302受到电动转向铰链303的作用下进行旋转,直至旋转到合适的角度,亦可不需要使用电动转向铰链303对喷涂辅块302进行改变角度,此时进行喷涂;
34.s2、当进行喷涂时,首先涂料经过涂料输送杆2进入到喷涂装置3内时,首先涂料会汇聚在汇流槽3012,汇流槽3012内的涂料汇聚过多时,就会使得涂料向主体出流槽3013处移动,同时也会通过管道向辅块出流槽3022内进行输送,且由于涂料输送杆2与喷头304以及流出孔305的软质输送管不直接接触,从而通过涂料输送杆2运输的推力的影响几乎为零;
35.s3、当输送导致主体出流槽3013堆积满后,会通过软质输送管穿过流出孔305到达限流装置306处,限流装置306的顶端由于插销3063、拉力弹簧3064以及推动弹簧3065的作用下产生的拉力导致限流块3061顶端的限流夹槽3062的阻力最小,而限流装置306底端的软质输送管受到插销3063、拉力弹簧3064以及推动弹簧3065的作用下产生的推力导致限流块3061底端的限流夹槽3062的阻力最大,从而会流速变慢,同时其余部位也会相应发生变化从而产生均质为喷涂流量,从而进行大面积喷涂。
36.最后应说明的几点是:首先,在本技术的描述中,需要说明的是,除非另有规定和限定,术语“安装”、“相连”、“连接”应做广义理解,可以是机械连接或电连接,也可以是两个元件内部的连通,可以是直接相连,“上”、“下”、“左”、“右”等仅用于表示相对位置关系,当被描述对象的绝对位置改变,则相对位置关系可能发生改变;
37.其次:本发明公开实施例附图中,只涉及到与本公开实施例涉及到的结构,其他结构可参考通常设计,在不冲突情况下,本发明同一实施例及不同实施例可以相互组合;
38.最后:以上所述仅为本发明的优选实施例而已,并不用于限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。