1.本发明涉及一种粒子加速器治疗床。
背景技术:
2.粒子加速器治疗就是一种利用电磁加速的原理对带电粒子进行加速,最终通过轰击重金属靶发生韧性辐射,以此为临床上放射治疗提供符合要求的x或e线辐射束,而x或e线对肿瘤细胞具有破坏及增殖抑制的作用,所以“放疗”就是以此达到治疗目的的。
3.目前,使用粒子加速器加速以后的粒子进行诊疗时,粒子加速器提供速度达到诊疗要求的射束,然后使用束流配送系统将束流传送到临床使用,再利用束流引导系统将粒子射束准确无误地射向肿瘤等病灶,传统的束流配送系统的输出终端输出能量可控的束流,而束流引导系统一般是一种圆环形设备,将束流引导射向圆环形的圆心处。在对患者进行放射性诊疗时,患者一般需要躺在治疗床上,治疗床搭载着患者需要伸入到圆环形的束流引导系统中间,因此,患者躺在治疗床上以后需要摆动进圆环中去,另外由于不同的患者肿瘤位置不同,患者平躺在治疗床上时,还需要治疗床绕其轴自转,再又就是调节治疗床床板的高度、左右和前后的三维位置。传统的治疗床一般只能实现其床板上下、左右、前后直线移动,不能实现向圆环形的束流引导系统中摆动,也不能绕其轴旋转,因此,在粒子加速器诊疗时需要提供合适于粒子加速器治疗的治疗床。
技术实现要素:
4.本发明的目的是提供一种适合于粒子加速器诊疗的粒子加速器治疗床,该治疗床共有五个自由度,通过两个轴心线垂直的回旋轴和三个分别沿左右、前后、上下方向的直线移动机构来实现。
5.本发明为实现其技术目的所采用的技术方案是:一种粒子加速器治疗床,包括床板、底座;带动床板做直线运动的上下移动机构、左右移动机构和前后移动机构;
6.还包括将床板绕与地面垂直方向摆动的摆动机构和实现床板旋转的旋转机构;
7.所述的摆动机构包括摆臂和回旋轴b,所述的摆臂为一根承重梁,固定端设置有与其垂直的安装部,所述的回旋轴b的轴心线垂直设置在所述的底座上,所述的摆臂的安装部与回旋轴b轴接实现摆臂绕回旋轴b中心轴线摆动;
8.所述的旋转机构包括回旋轴a,所述的回旋轴a的轴心线水平设置与摆臂的自由端轴接,所述床板底面与所述的回旋轴a的外环相连,实现床板绕回旋轴a的轴心线旋转。
9.进一步的,上述的粒子加速器治疗床中:所述的床板和回旋轴a的外环之间还设置有方形安装座,所述的方形安装座上下两个表面分别与床板和回旋轴a的外环固定。
10.进一步的,上述的粒子加速器治疗床中:所述床板的竖向中心线与所述的回旋轴a的轴心线平行。
11.进一步的,上述的粒子加速器治疗床中:所述的摆臂的安装部为一圆柱形结构,与回旋轴b轴接时,安装部与回旋轴b的外环相连,随回旋轴b外环旋转带动摆臂摆动。
12.进一步的,上述的粒子加速器治疗床中:所述的回旋轴b内环与一个磁滑板a上表面连接;所述磁滑板a下表面与一块水平矩形板的上表面活动连接;所述的水平矩形板的下表面与磁滑板b上表面活动连接。
13.进一步的,上述的粒子加速器治疗床中:所述的磁滑板a和磁滑板b内均布有圆柱形永磁铁和顶针轴承,所述的圆柱形永磁铁和顶针轴承的轴线与表面垂直,两个磁滑板内的圆柱形永磁铁磁极同极相对。
14.本发明为粒子加速器诊疗提供治疗床的床板可以自旋和摆动,同时可沿上下方向升降,可沿左右方向和前后方向平移。
15.下面结合附图和具体实施例对本发明进行详细地说明。
附图说明
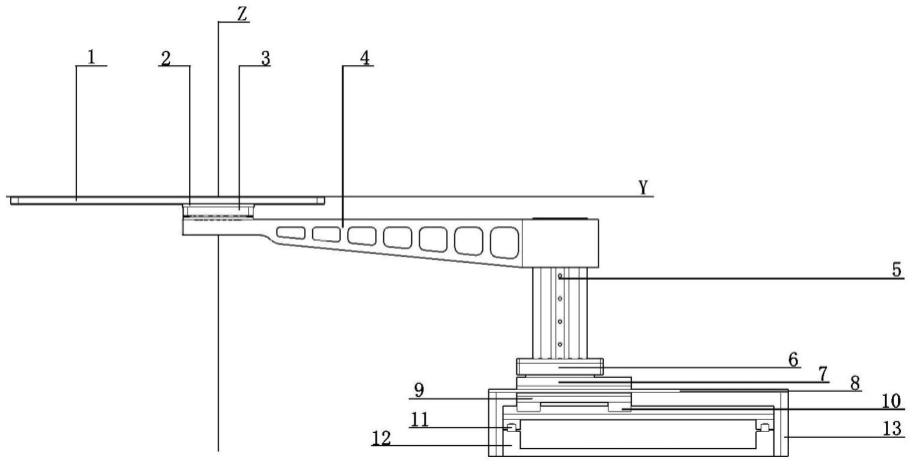
16.图1、治疗床结构图;
17.图2、底座内部结构图;
18.图3、磁滑板b的结构图;
19.图4、治疗床与影像系统配合示意图之一;
20.图5、治疗床与影像系统配合示意图之二;
21.图6、治疗床与影像系统配合示意图之三。
22.图中符号:
23.1、床板
24.2、安装座
25.3、回旋轴a
26.4、摆臂
27.5、连接部
28.6、回旋轴b
29.7、磁滑板a
30.8、连接板
31.9、磁滑板b
32.9-1、底板;9-2、圆柱形永磁铁;9-3、顶针轴承;9-4、压板;
33.10、左右移动导轨
34.11、前后移动导轨
35.12、导轨座
36.13、底座
37.14、束流配送系统的梯形安装框架
38.15、影像引导实时定位系统。
具体实施方式
39.实施例1,本实施例一种粒子加速器治疗床,具有五个移动方向,包括前后、左右、上下三个直线移动机构,以及两个绕轴旋转方向,如图1所示:包括床板1;床板1由一摆臂4支撑;摆臂4的自由端接一个轴心线水平的回旋轴a3,实际上,回旋轴a3的内环与摆臂4的自
由端固定,回旋轴a3的外环通过一个安装座2接所述的床板1,回旋轴a3的外环可以绕摆臂4的自由端旋转,带动与其固定的床板1也绕摆臂自由端旋转实现床板4自旋。摆臂4利用一个连接部5与回旋轴b6连接,实际上,摆臂4是一种横梁,是水平设置的,连接部5则是一根垂直设置的转轴,连接部5可以带动摆臂4摆动,这样,连接部5可以以回旋轴b6的中轴线为旋转轴旋转相当的角度,实现摆臂4带动床板1摆动,可以将床板1摆动到一个圆环形的粒子加速器影像引导实时定位系统15的圆环形框架中,在圆环形框架内,可以通过直线移调整床板1的位置,如通过延长连接部5的长度提升床板1的高度,这就实现了竖向(垂直方向)上的直线移动(提升、下降),实践中,很多情况下,连接部5上采用液压等方式将摆臂4向上提升。另外,在连接部5的底部与回旋轴b6一起设置在一个可移动的装置上,实现水平移动,包括前后、左右方向移动,这样的机构目前很多,本实施例中,将前后移动导轨11和左右移动导轨10设置在底座13内,实现摆臂4和回旋轴b6在底座13上水平移动,在其它一些实施例中,也可以在底座13下面设置一组轮子,轮子在水平的地板上移动,实现摆臂4带动床板1在水平方向移动,结合摆臂4的连接部5伸缩实现床板1在上下方向升降,实现了上下、左右、前后三维直线移动。结合摆臂4摆动和床板1以摆臂轴线为旋转轴旋转实现自转,因此,实现了五维的运动。
40.如图2所示,是本实施例中治疗床的底座13的结构图,如图2所示,底座13是一个中空座,在底座13内有相互垂直的两幅导轨,分别是左右移动导轨10和前后移动导轨11,前后移动导轨11利用导轨座12安装在底座13水平的底面上,而左右移动导轨10利用滑块安装在前后移动导轨11上,而摆臂4的连接部5以及回放轴b6是可以在左右移动导轨10上左右移动的。由于床板1上是需要躺人的,因此,需要有一定的强度,重量也不会太小,而摆臂4可以支撑床板及躺在床板1上的患者,因此,也需要有较强的强度,一般可以采用钢臂结构,因此,连接部5以及回放轴b6是与左右移动导轨10连接时需要有一个较强结构的连接座,本实施例中,直接将连接部5和回放轴b6安装在底座13的上面的连接板8上,实现上,连接板8就是底座1的上盖板,为了实现摆臂4沿左右移动导轨10或者间接沿前后移动导轨11滑动,本实施例中采用磁滑板技术,两个磁滑板置于连接板8的上下,通过下方磁滑板拖动上方磁滑板同步水平移动的方式实现摆臂水平运动,实现上是间接地沿左右移动导轨10或者间接沿前后移动导轨11滑动。
41.如图1、2、3所示,摆臂4的安装部5为一圆柱形结构,与回旋轴b6轴接时,安装部5与回旋轴b6的外环相连,随回旋轴b6外环旋转带动摆臂4摆动。回旋轴b6内环与一个磁滑板a7上表面连接;磁滑板a7下表面与一块连接板8的上表面活动连接;这连接板8实际上就是底座13的上盖,连接板8的下表面与磁滑板b9上表面活动连接,磁滑板b9下表面利用滑块安装在左右移动导轨10上。
42.本实施例中,滑块和回旋轴可以在中心计算机控制下滑动,如需要床板1向前或者向后平移时,控制左右移动导轨10下面沿前后移动导轨11滑动的滑块向前、或者向后运动;当需要左右移动时,控制磁滑板b9的滑块沿左右移动导轨10左右运动;当需要上下移动时,控制液压泵,使摆臂4实现升降;当患者躺在床板1上,需要进入到影像引导实时定位系统15的圆环形支架内时,控制回旋轴b6旋转,使摆臂4带动床板1及患者进入到圆环形支架内。当患者平躺在床板1上,而病灶(肿瘤)并没有暴露在射束下时,控制回放轴a3旋转,使肿瘤部位暴露。
43.本实施例中,两块磁滑板同步地在连接板上下滑动,该两块磁滑板具有相同的结构,如图3所示,磁滑板包括底板9-1和压板9-4,实际中,底板9-1和压板9-4均水平设置,还具有一定数量的圆柱形永磁铁9-2和上细下粗台阶的横竖间隔排列的圆柱形顶针轴承9-3,它们安装在底板9-1上,上面用压板9-4压着。
44.具体的,如图1所示,本实施例描述过程中,采用直角坐标的方式,坐标系统xyz,其中z轴表示与水平面垂直的方向,而xy平面则为水平面。实际上,z轴方向就是上下方向,x轴方向就是前后方向,y轴方向则是左右方向。
45.本实施例的粒子加速器治疗床包括一个床板1,床板1为一个长方形厚板,其下表面与一个有两个边与床板1长边平行的安装座2的上表面连接,安装座2的下表面与一个轴心线与z轴平行的回旋轴a3的外环连接,回旋轴a3的内环与一个摆臂4一端的表面与z轴垂直的圆形座连接,摆臂4另一端的轴心线与z轴平行的圆筒与一个竖向移动机构5活动连接;竖向移动机构5的圆形底座的下表面与一个轴心线与z轴平行的回旋轴b6的外环连接;所述的回旋轴6的内环与一个方向向下的磁滑板a7连接;磁滑板a7与一个与z轴垂直的连接板8的上表面活动连接;连接板8的下表面与一个方向向上的磁滑板b9活动连接;磁滑板b9的下表面与一个左右移动机构10活动连接;所述的左右移动机构10与一个前后移动机构11活动连接;所述的前后移动机构11与导轨座12连接;连接板8的下表面边缘与一个矩形框架13连接。
46.如图4、图5和图6所示,在上述三个直线移动机构和两个回旋轴各自驱动机构的驱动下,床板1可以回旋轴a3的轴心线为轴心自旋,可以回旋轴b6的轴心线为轴心摆动,可沿z轴方向(竖向)升降,可沿x轴(左右)方向和y轴(前后)方向平移。
47.图4所示的是,床板1以回旋轴a3的轴心线为轴心向x轴方向自旋了90
°
,让床板1将肿瘤从影响引导实时定位系统15的左侧送入治疗区。所谓肿瘤送入治疗区是指将肿瘤的照射靶心与等中心重合。
48.图5所示的是,通过让床板1以回旋轴a3的轴心线为轴心的自旋,以回旋轴b6的轴心线为轴心的摆动,沿x轴方向的直线左右移动机构的平移,让床板1将肿瘤从影响引导实时定位系统15的右侧送入治疗区。
49.图6所示的是,通过让床板1以回旋轴a3的轴心线为轴心的自旋,沿y轴方向的直线前后移动机构和x轴方向的左右移动机构的平移,让床板1以其长边与x轴的有一定角度的方向将肿瘤从影响引导实时定位系统15的左侧送入治疗区。图6所示的演示的情况是非共面照射,图中,床板1的自旋角度是45
°
,还可进一步放大。
50.由于磁滑板a7与磁滑板b9在连接板8的上下的吸引和拖动功能,从外面看不到y轴方向的直线前后移动导轨10和x轴方向的直线左右移动导轨11及其驱动系统,看起来十分简洁。连接板8可与地板齐平,本身有一定强度,医务人员可在上面行走。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。