1.本实用新型涉及直流电机技术领域,尤其是涉及一种直流无刷电机。
背景技术:
2.直流无刷电机是指无电刷和换向器(或集电环)的电机,又称无换向器电机。具有传统直流电机的优点,同时又取消了碳刷、滑环结构以及可替代直流电机调速、变频器 变频电机调速、异步电机 减速机调速等优点。目前,现有技术中的直流无刷电机通常采用霍尔传感器感应极性替代电刷直接接触,延长了直流电机使用时长,避免需经常性更换电刷带来的使用繁琐的问题。但是,霍尔传感器在进行感应极性过程中,需要受到一定量的高斯值(磁感应强度值)才会切换信号,转子的充磁和距离远近受到限制。
技术实现要素:
3.本实用新型的目的旨在提供一种直流无刷电机,采用发射红外光和接收红外光感应转子的极性,输出切换相位的信号,代替传统的霍尔传感器,具有反映速度快、感应距离远的特点,而且保障了检测转子极性的可靠性。
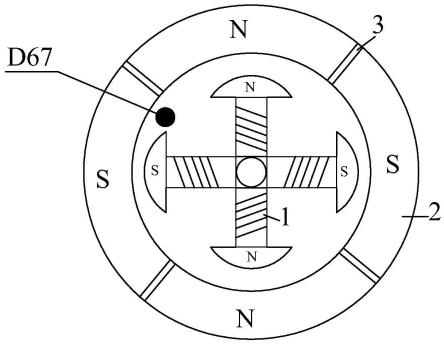
4.为解决上述技术问题,本实用新型提供的技术方案是:一种直流无刷电机,包括定子和转子,在定子与转子的间隙中设有由红外发射管d6和红外接收管d7组成的红外发射与接收管,转子端面沿圆周方向设有反光片,红外发射管d6发出红外光线,红外接收管d7检测反光片上的红外光线。
5.本实用新型采用上述技术方案,定子产生旋转磁场驱动转子旋转,在转子旋转过程中,反光片跟随旋转,红外发射管通电一直保持发出红外光线,当红外光线照射在反光片,反光片将光线反射回红外接收管中,红外接收管接收到红外光后,可反馈信息至微控制单元中。通过红外光线代替传统的霍尔传感器感应转子的极性变化,具有反映速度快,感应距离更远的优点。
6.进一步地,反光片呈两两依次垂直的角度设置。两两反光片的延长线相交时呈垂直角度,两两垂直,反光片的数量可以为4个,沿转子的端面圆周方向均布。
7.进一步地,反光片贴在转子的端面上,红外发射与接收管的照射端与接收端定位在反光片上方。
8.进一步地,还包括微控制单元,微控制单元与红外接收管信号连接。红外接收管接收到红外光线后,输出一个高电平将该所检测到的转子在转动过程中反光片反射回的红外光线信息反馈至微控制单元中,使得微控制单元分析判断出转子的极性。
9.进一步地,微控制单元电路连接有用于驱动电机产生交变磁场、控制转子旋转的h桥。h桥用于控制电机旋转。
10.进一步地,微控制单元电路连接有输出驱动信号至h桥中的驱动电路。驱动电路通过vm端输出控制信号驱动h桥电路工作,驱动电机旋转。
11.进一步地,h桥由第一mos集成模块u3和第二mos集成模块耦接组成。
12.进一步地,微控制单元电路连接有电机转速信号采集电路。电机转速信号采集电路用于获取电机转速的信息。
13.进一步地,微控制单元线路连接有pwm脉冲控制信号电路。pwm脉冲控制信号电路用于发出脉冲信号至微控制单元中,微控制单元输出控制信号驱动驱动电路工作,用以驱动h桥电路控制电机的工作。
14.本实用新型还具有如下有益效果是:在转子上设置反光片,红外发射管保持发出红外光线,当转子上的反光片旋转至红外发射管发出的红外光线下时,将该红外光线反射回红外接收管中,红外接收管接收到该红外光线后发出一个高电平反馈至微控制单元中,微控制单元判断红外接收管反馈的信息,判断转子上该反光片旋转位置并通过与旋转时间及转子的转速等信息进行分析,可判断转子的极性变化,通过利用红外光线感应的原理,替代霍尔传感器具有感应距离远,响应速度快的特点。
附图说明
15.图1至图4是本实用新型在工作中的转子极性变化图;
16.图5是本实用新型一种直流无刷电机的控制电路结构示意图;
17.图6是本实用新型一种直流无刷电机的驱动电路结构图;
18.图7是本实用新型一种直流无刷电机的h桥的等效电路结构示意图;
19.图8是本实用新型一种直流无刷电机的h桥的具体电路结构示意图;
20.图9是本实用新型一种直流无刷电机的红外发射管与红外接收管的电路连接结构示意图。
具体实施方式
21.下面结合附图和具体实施方式对本实用新型作进一步的说明。
22.参照图1至图4所示,一种直流无刷电机,包括定子1和转子2,在定子1与转子2的间隙中设有由红外发射管d6和红外接收管d7组成的红外发射与接收管d67,转子2端面沿圆周方向设有反光片3,红外发射管d6发出红外光线,红外接收管d7检测反光片3上的红外光线。
23.反光片3呈两两依次垂直的角度设置。在本实施方式中,反光片3的数量为4个,沿转子2的圆周端面均匀分布,相对的反光片3的连线相互垂直。
24.反光片3贴在转子的端面上,红外发射与接收管d67的照射端与接收端定位在反光片3上方。
25.如图1所示,定子1的正负两端通电产生磁场,定子1的端部分别形成ns极性,由于同性相斥、异性相吸作用,定子1产生的旋转磁场驱动转子2旋转。
26.如图2所示,红外接收管d7检测到转子2刚转动时转子2的ns极性的中间位置,该位置为反光片3的位置,此时转子2极性准备发生改变,红外接收管d7发出信号。
27.如图3所示,微控制单元u1检测到红外接收管d7发出的信号后,切换定子1的正负极,定子的极性发生变化,继续同性相斥、异性相吸的作用驱动转子2旋转。
28.如图4所示,红外接收管d7再次检测到转子2的ns极性的中间位置,转子2的极性准备发生改变,此时红外接收管d7发出信号。
29.应理解,在工作过程中,红外发射管d6为一直保持发出红外光线的状态,红外接收
管d7通过反光片3的反射,接收到红外发射管d6发出的红外光线后,红外接收管d7会发出一个高电平信号至微控制单元u1中,微控制单元u1做出相应调整,发出控制信号使得驱动电路5驱动h桥4工作,驱动电机旋转。
30.参照图1至图9所示,本实用新型还包括微控制单元u1,微控制单元u1与红外接收管d7信号连接。
31.微控制单元u1电路连接有用于驱动电机产生交变磁场、控制转子旋转的h桥4以及输出驱动信号至h桥4中的驱动电路5。
32.h桥4由第一mos集成模块u3和第二mos集成模块u4耦接组成。微控制单元u1电路连接有电机转速信号采集电路6。微控制单元u1线路连接有pwm脉冲控制信号电路7。
33.pwm脉冲控制信号电路7输入脉冲信号,经过处理后,输入至微控制单元u1中进行处理,微控制单元u1根据该pwm脉冲信号输出控制信号至驱动电路5中,驱动h桥4工作,控制电机的运转。在运转过程中,通过电机转速信号采集电力6,采集电机的转速信号。
34.综上所述,本实用新型已如说明书及图示内容,制成实际样品且经多次使用测试,从使用测试的效果看,可证明本实用新型能达到其所预期之目的,实用性价值乃无庸置疑。以上所举实施例仅用来方便举例说明本实用新型,并非对本实用新型作任何形式上的限制,任何所属技术领域中具有通常知识者,若在不脱离本实用新型所提技术特征的范围内,利用本实用新型所揭示技术内容所作出局部更动或修饰的等效实施例,并且未脱离本实用新型的技术特征内容,均仍属于本实用新型技术特征的范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。