1.本实用新型涉及儿童教育器具领域,尤其是涉及一种侧转式球形机器人。
背景技术:
2.随着时代的发展,一种融合信息技术,秉承“开放创新、探究体验”教育理念,以“创造中学”为主要学习方式和以培养各类创新型人才为目的的新型教育模式应运而生。传统教育具有深深的工业化烙印,是典型的基于知识的教育(knowledge-based education);现在的儿童教育则是适应知识经济时代发展的以能力为导向的教育(competence-based education)。现在儿童教育是科学发明文化与教育的结合,基于学生兴趣,以项目学习的方式,使用数字化工具,倡导造物,鼓励分享,培养跨学科解决问题能力、团队协作能力和创新能力的一种素质教育。这种教育模式背后蕴含着丰富的教育理念,其中最突出的便是教育家杜威提出的“做中学”(learning by doing)思想。“做中学”也就是“从活动中学”、“从真实体验中学”,将所学知识与生活实践联系起来,知行合一。现代儿童教育也强调学生的主观感受,引导学生培养快乐、自主的学习习惯。这种教育内容往往与现实问题的解决紧密相关,是一种问题导向式教育,让学生发现现实问题,寻求创意的解决方法并通过努力使之变成现实。我们对此特别设计了一系列儿童教育机器人,针对的目标群体主要是8岁以上的儿童、青少年,为了提高学生的动手能力,培养发散性思维,儿童教育机器人由多种零件组成,。本实用新型主要设计一种示范性的儿童教育机器人,旨在寓教于乐,以玩具的形式增加学生的学习兴趣,激发学生的好玩心和好奇心,使学生更加愿意动手去学习,提高学生的动手能力。
技术实现要素:
3.鉴于上述现有技术的不足之处,本实用新型的目的在于提供一种侧转式球形机器人。
4.为解决以上技术问题,本实用新型采取了以下技术方案:
5.本实用新型提供了一种侧转式球形机器人,包括球形主体,所述球形主体上的一侧部具有可转动的侧圆环,所述侧圆环可相对球形主体的球面进行自转,所述球形主体内设置有驱动电机、主驱动轴、次驱动轴,所述驱动电机驱动所述主驱动轴转动,所述主驱动轴驱动与所述次驱动轴之间通过一对锥形轮连接传动,所述次驱动轴装设于侧圆环的轴心处,当次驱动轴转动,使所述侧圆环于所述球形主体上转动,所述侧圆环和球形主体构成一个完整的球体。
6.在一较佳实施例中,所述的侧转式球形机器人,一对锥形轮通过锥面摩擦传动。
7.在一较佳实施例中,所述的侧转式球形机器人,所述锥形轮为锥齿轮,两个锥形轮啮合传动。
8.在一较佳实施例中,所述的侧转式球形机器人,两个锥形轮的两轴之间的交角等于90
°
。
9.在一较佳实施例中,所述的侧转式球形机器人,所述锥形轮的锥面设置有橡胶摩擦层。
10.相较于现有技术,本实用新型提供的一种侧转式球形机器人,包括球形主体,所述球形主体上的一侧部具有可转动的侧圆环,所述侧圆环可相对球形主体的球面进行自转,所述球形主体内设置有驱动电机、主驱动轴、次驱动轴,所述驱动电机驱动所述主驱动轴转动,所述主驱动轴驱动与所述次驱动轴之间通过一对锥形轮连接传动,所述次驱动轴装设于侧圆环的轴心处,当次驱动轴转动,使所述侧圆环于所述球形主体上转动,所述侧圆环和球形主体构成一个完整的球体。本实用新型能够通过侧圆环的转动,使球形机器人位于平面上时,能够改变球形机器人的移动走向及驱动球形机器人的移动,这种移动方式的球形机器人可以在平面内随机移动,其结构简单,适用于儿童娱乐,也可以用于逗猫。
附图说明
11.为了更清楚地说明本实用新型实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图示出的结构获得其他的附图。
12.图1为本实用新型提供的侧转式球形机器人的结构示意图一。
13.图2为本实用新型提供的侧转式球形机器人的内部结构示意图。
14.图3为本实用新型提供的侧转式球形机器人的结构示意图二。
15.图4为本实用新型提供的二合一机器人的结构示意图。
16.图5为本实用新型提供的多向球形机器人的去除底盖的结构示意图。
具体实施方式
17.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型的一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
18.需要说明,若本实用新型实施例中有涉及方向性指示(诸如上、下、左、右、前、后
……
),则该方向性指示仅用于解释在某一特定姿态(如附图所示)下各部件之间的相对位置关系、运动情况等,如果该特定姿态发生改变时,则该方向性指示也相应地随之改变。
19.另外,若本实用新型实施例中有涉及“第一”、“第二”等的描述,则该“第一”、“第二”等的描述仅用于描述目的,而不能理解为指示或暗示其相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括至少一个该特征。另外,各个实施例之间的技术方案可以相互结合,但是必须是以本领域普通技术人员能够实现为基础,当技术方案的结合出现相互矛盾或无法实现时应当认为这种技术方案的结合不存在,也不在本实用新型要求的保护范围之内。
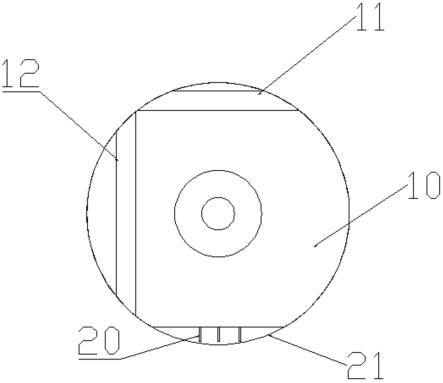
20.如图1-图5所示,本实用新型提供的本实用新型提供了一种球形机器人,包括球形主体10,所述球形主体10上的上部具有可转动的上圆环11,所述上圆环11可相对球形主体10的球面进行自转,所述球形主体10内设置有驱动电机14、主驱动轴15,所述驱动电机14驱
动所述主驱动轴15转动,所述主驱动轴15装设于上圆环11的轴心处,当所述主驱动轴15转动,使所述上圆环11于所述球形主体10上转动,所述上圆环11和球形主体10 构成一个完整的球体。本实用新型能够通过上圆环11的转动,使球形机器人位于平面上时,能够改变球形机器人的移动走向及驱动球形机器人的移动,这种移动方式的球形机器人可以在平面内随机移动,其结构简单,适用于儿童娱乐,也可以用于逗猫。
21.进一步的,本实用新型提供的球形机器人,所述主驱动轴15与上圆环 11的轴心处的轴孔之间设置有摩擦层18,所述主驱动轴15通过摩擦层18 与所述上圆环11摩擦连接、驱动所述上圆环11转动。这样即使在上圆环 11卡死的情况下,电机不被卡死,有利于防止电机被烧。
22.进一步的,本实用新型提供的球形机器人,所述摩擦层18采用羊毛毡摩擦层18。
23.进一步的,本实用新型提供的球形机器人,所述球形主体10内设置有电池,所述电池与所述驱动电机14电性连接。电池的配置除了供电,也可以用于平衡球体的重心位置。
24.进一步的,本实用新型提供的球形机器人,所述电池的设置于驱动电机14的对侧。
25.进一步的,本实用新型提供的球形机器人,所述球形主体10的球心和重心重合。
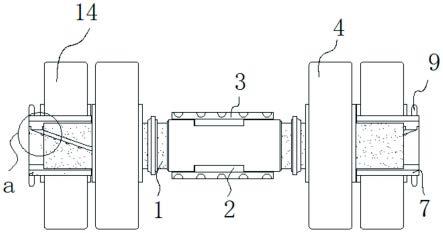
26.基于上述设计,本实用新型还提供了另外一种方向的设计,本实用新型提供了一种侧转式球形机器人,包括球形主体10,所述球形主体10上的一侧部具有可转动的侧圆环12,所述侧圆环12可相对球形主体10的球面进行自转,所述球形主体10内设置有驱动电机14、主驱动轴15、次驱动轴16,所述驱动电机14驱动所述主驱动轴15转动,所述主驱动轴15驱动与所述次驱动轴16之间通过一对锥形轮17连接传动,所述次驱动轴16装设于侧圆环12的轴心处,当次驱动轴16转动,使所述侧圆环12于所述球形主体10上转动,所述侧圆环12和球形主体10构成一个完整的球体。本实用新型能够通过侧圆环12的转动,使球形机器人位于平面上时,能够改变球形机器人的移动走向及驱动球形机器人的移动,这种移动方式的球形机器人可以在平面内随机移动,其结构简单,适用于儿童娱乐,也可以用于逗猫。
27.较佳的,本实用新型提供的侧转式球形机器人,一对锥形轮17通过锥面摩擦传动。
28.较佳的,本实用新型提供的侧转式球形机器人,在其它实施例中所述锥形轮17也可采用锥齿轮,两个锥形轮17啮合传动。
29.较佳的,本实用新型提供的侧转式球形机器人,两个锥形轮17的两轴之间的交角等于90
°
。
30.较佳的,本实用新型提供的侧转式球形机器人,所述锥形轮17的锥面设置有橡胶摩擦层18。摩擦传动有利保护电机,防止侧圆环12卡死时电机无法转动而烧掉。
31.基于上述设计,本实用新型还推进了进一步地融合设计,本实用新型还提供了一种多向球形机器人,包括球形主体10,所述球形主体10上的上部具有可转动的上圆环11,所述球形主体10上的一侧部具有可转动的侧圆环12,所述上圆环11可相对球形主体10的球面进行自转,所述侧圆环12 可相对球形主体10的球面进行自转,所述上圆环11与下圆环的转动互不干涉,所述球形主体10内设置有驱动电机14、主驱动轴15和次驱动轴16,所述驱动电机14驱动所述主驱动轴15转动,所述主驱动轴15装设于上圆环11的轴心处,当所述主驱动轴15转动,使所述上圆环11于所述球形主体10上转动,所述主驱动轴15驱动与所述次驱动轴16之间通过一对锥形轮17连接传动,所述次驱动轴16装设于侧圆环12的轴心处,当次驱动轴 16转动,使所述侧圆环12于所述球形主体10上转动,所述上圆环11、侧圆环12和球形
主体10构成一个完整的球体。本实用新型的多向球形机器人运动的维度更加广阔,不再是沿单向驱动,通过上圆环11和下圆环的配合实现多向驱动,同功耗下球体滚动的持续时间更长。
32.本实用新型的上圆环11和侧圆环12相当于贴合于球面上的轮子,其内部设置有轮辐(图中未示出)和轴孔,与主驱动轴15或次驱动轴16(相当于轮轴)连接。
33.进一步的,本实用新型提供的多向球形机器人,所述主驱动轴15与上圆环11的轴心处的轴孔之间设置有摩擦层18,所述主驱动轴15通过摩擦层18与所述上圆环11摩擦连接、驱动所述上圆环11转动。
34.进一步的,本实用新型提供的多向球形机器人,所述摩擦层18采用羊毛毡摩擦层18。
35.进一步的,本实用新型提供的多向球形机器人,所述球形主体10内设置有电池,所述电池与所述驱动电机14电性连接。
36.进一步的,本实用新型提供的多向球形机器人,一对锥形轮17通过锥面摩擦传动。
37.进一步的,本实用新型提供的多向球形机器人,所述锥形轮17为锥齿轮,两个锥形轮17啮合传动。
38.进一步的,本实用新型提供的多向球形机器人,两个锥形轮17的两轴之间的交角等于90
°
。
39.进一步的,本实用新型提供的多向球形机器人,所述锥形轮17的锥面设置有橡胶摩擦层18。
40.进一步的,本实用新型提供的多向球形机器人,所述侧圆环12和上圆环11的外表面设置有胎层,加上胎层后的所述侧圆环12和上圆环11的外表面高于球形主体10的球面0.2~1mm。这里需要适用耐磨性较强的材料作为摩擦面。
41.进一步的,本实用新型提供的多向球形机器人,在其它实施例中也可以还设置一个次驱动轴、锥形轮和侧圆环,对称设置于主驱动轴15的另一侧,所述主驱动轴15同时驱动左右两侧的侧圆环转动。
42.不仅如此,本实用新型还在上述设计内容的基础上结合其它机器人进行了进一步多元化设计,本实用新型提供了一种二合一机器人,包括多向球形机器人和移动机器人30,所述多向球形机器人装设于所述移动机器人 30上,所述球形机器人的下部设置有一个可拆卸的底盖21,所述多向球形机器人位于底盖21内的一端,设置有两对插针20,两对插针20中至少有一对为电极,所述移动机器人30上相应设置有四个插孔,当所述多向球形机器人拆卸掉所述底盖21,露出插针20,所述插针20插设于所述插孔内,使所述多向球形机器人与移动机器人30装配于一体,同时,移动机器人30 通过插孔向多向球形机器人供电。本实用新型将移动小车与球形机器人进行了结合,不仅可以分离作为独立的机器人进行运作,也可以合为一体进行运作。
43.进一步的,本实用新型提供的二合一机器人,两对插针20中有一对为固定针,当固定针插入相应的插孔后,阻碍多向球形机器人与移动机器人30的分离。
44.进一步的,本实用新型提供的二合一机器人,所述固定针与相应的插孔过盈配合。
45.进一步的,本实用新型提供的二合一机器人,所述固定针为橡胶棒或硅胶棒。
46.进一步的,本实用新型提供的二合一机器人,所述固定针与相应的插孔卡扣连接。
47.进一步的,本实用新型提供的二合一机器人,四个插针20呈四角对称分布。
48.进一步的,本实用新型提供的二合一机器人,所述多向球形机器人的底盖21采用螺纹连接。
49.进一步的,本实用新型提供的二合一机器人,所述移动机器人30包括移动主体,所述移动主体上设置有可转动的颈部31,所述插孔设置于颈部 31上,所述移动主体的底部设置有移动轮32。
50.进一步的,本实用新型提供的二合一机器人,所述多向球形机器人包括球形主体,所述球形主体上的上部具有可转动的上圆环,所述球形主体上的一侧部具有可转动的侧圆环,所述上圆环可相对球形主体的球面进行自转,所述侧圆环可相对球形主体的球面进行自转,所述上圆环与下圆环的转动互不干涉,所述球形主体内设置有驱动电机、主驱动轴和次驱动轴,所述驱动电机驱动所述主驱动轴转动,所述主驱动轴装设于上圆环的轴心处,当所述主驱动轴转动,使所述上圆环于所述球形主体上转动,所述主驱动轴驱动与所述次驱动轴之间通过一对锥形轮连接传动,所述次驱动轴装设于侧圆环的轴心处,当次驱动轴转动,使所述侧圆环于所述球形主体上转动,所述上圆环、侧圆环和球形主体构成一个完整的球体,所述底盖的设置不干涉侧圆环的运动。
51.进一步的,本实用新型提供的二合一机器人,所述多向球形机器人上设置有距离传感器(图中未标号)。
52.综上所述,本实用新型能够通过侧圆环的转动,使球形机器人位于平面上时,能够改变球形机器人的移动走向及驱动球形机器人的移动,这种移动方式的球形机器人可以在平面内随机移动,其结构简单,适用于儿童娱乐,也可以用于逗猫。
53.以上所述仅为本实用新型的优选实施例,并非因此限制本实用新型的专利范围,凡是在本实用新型的实用新型构思下,利用本实用新型说明书及附图内容所作的等效结构变换,或直接/间接运用在其他相关的技术领域均包括在本实用新型的专利保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。