用于坐标测量机的人体工程学移动控制器
1.相关申请
2.本技术要求于2019年11月11日提交的题为“ergonomic mobile controller for coordinate measuring machine”、发明人为milan kocic的美国专利申请no.16/679,987[代理人案卷号37401-16301]的优先权。
[0003]
前述申请的公开内容通过引用整体并入本文。
技术领域
[0004]
本公开涉及坐标测量机,更具体地,涉及用于控制坐标测量机的装置。
背景技术:
[0005]
坐标测量机(cmm)用于准确地测量各种各样的工件。例如,cmm可以测量飞机发动机组件、手术工具和枪管的关键尺寸。精确和准确的测量有助于确保诸如飞机(在飞机组件的情况下)之类的基础系统按规定运行。另一方面,表面光洁度的测量历来超出了cmm的能力,并且需要专门的工具。
技术实现要素:
[0006]
根据一个实施方式,一种用于坐标测量机的移动控制器包括壳体,该壳体具有顶面、与顶面相反的背面以及在顶面与背面之间延伸的侧面。多个正面控件设置在顶面上,使得当用双手握持移动控制器的侧面时,操作者(即,cmm操作者)的拇指可触及正面控件中的至少一些。在一些实施方式中,当利用人体工程学装置用双手握持移动控制器的相应的侧面时,cmm操作者的拇指无法触及正面控件中的至少一者。
[0007]
该控制器还包括从背面延伸的人体工程学装置,该人体工程学装置被配置成使操作者能够握持移动控制器,同时减轻cmm操作者的手和手指的疲劳。
[0008]
在一些实施方式中,人体工程学装置包括从背面向外延伸的抓握部,该抓握部被成形和设置成允许cmm操作者用单手抓握该抓握部并支撑移动控制器,以使cmm操作者能够用cmm操作者的另一只手操纵正面控件中的至少一者。在一些实施方式中,抓握部具有“t”形形状。
[0009]
在一些实施方式中,人体工程学装置包括凹形沟槽,该凹形沟槽从背面的表面向内延伸并设置在背面的边缘附近,并且被成形为接纳cmm操作者的手的三根外侧手指,使cmm操作者能够同时:用单手抓握移动控制器并支撑移动控制器,并用cmm操作者的另一只手操纵正面控件中的至少一者。此外,在其他实施方式中,人体工程学装置包括从背面的表面向内延伸的一组凹形沟槽,各个沟槽设置在背面的边缘附近,各个凹形沟槽被成形为接纳cmm操作者的手的三根外侧手指,以使cmm操作者能够同时:用单手抓握移动控制器并支撑移动控制器,并用cmm操作者的另一只手操纵正面控件中的至少一者。例如,在一些这样的实施方式中,该组凹形沟槽包括彼此平行的两个凹形沟槽,两个凹形沟槽中的每一者设置在移动控制器的两个相应边缘附近。
[0010]
前述实施方式中的任一个可以包括设置在壳体的顶面上或顶面处的显示屏,以便向cmm操作者呈现关于坐标测量机的操作的信息。在一些这样的实施方式中,显示屏是被配置成从cmm操作者接收用于控制坐标测量机的控制输入的触摸屏。
[0011]
前述实施方式中的任一个还可以包括设置在移动控制器的背面上的背面控件,该背面控件被配置成对操作者操纵做出响应,以:(a)在第一状态下,响应于操作者操纵正面控件而启用对坐标测量机的可移动特征进行的操作者控制,以及(b)在第二状态下,响应于操作者操纵所述正面控件而禁用对所述坐标测量机的该可移动特征进行的操作者控制。在一些这样的实施方式中,背面控件包括多个按钮,并且其中:(i)背面控件可通过操作者按下多个按钮中的至少一个按钮而配置成第一状态;并且(ii)背面控件可通过操作者释放多个按钮中的所有按钮而配置成第二状态。在一些这样的实施方式中,背面控件可通过操作者同时按下多个按钮中的至少两个按钮而配置成第一状态。
[0012]
另一实施方式是一种托架,该托架包括:被配置成搁置在平坦表面上的底座;以及从底座悬置的嵌套件(nest),该嵌套件被配置成接纳操纵盒(jogbox)并将操纵盒可移除地联接到托架。
[0013]
托架的一些实施方式包括在底座与托架之间延伸的一组侧壁,该组侧壁将托架从底座悬置。
[0014]
托架的一些实施方式还包括一组抓握孔,各个抓握孔被配置成接纳操作者的手以允许手指触及嵌套件中的操纵盒的背面并将操纵盒抬出嵌套件。在一些这样的实施方式中,该组抓握孔中的至少一个抓握孔被配置成允许操作者的手在操纵盒被固定在嵌套件中时触及并激活操纵盒的背面按钮。
[0015]
托架的一些实施方式还包括输入电接口,该输入电接口被配置成接收电力和通信信号。
[0016]
托架的一些实施方式还包括输出电接口,该输入电接口被配置成向固定在嵌套件中的操纵盒提供电力和通信信号。
附图说明
[0017]
实施方式的前述特征将通过参照以下结合附图的详细描述而更容易理解,其中:
[0018]
图1a示意性地例示了具有操纵盒的实施方式的坐标测量机的实施方式;
[0019]
图1b示意性地例示了工件的实施方式;
[0020]
图1c示意性地例示了控制接口的实施方式;
[0021]
图1d示意性地例示了控制器的实施方式;
[0022]
图1e示意性地例示了人手的实施方式;
[0023]
图2a、图2b、图2c、图2d、图2e、图2f和图2g示意性地例示了操纵盒的实施方式的视图和特征;
[0024]
图3a、图3b、图3c、图3d、图3e、图3f、图3g和图3h示意性地例示了操纵盒的另一实施方式的视图和特征;
[0025]
图4a、图4b、图4c、图4d、图4e和图4f示意性地例示了操纵盒托架的实施方式的视图。
具体实施方式
[0026]
本文描述的实施方式提供了一种移动cmm控制器,其包括一个或更多个人体工程学装置,这些装置被配置和设置成允许cmm操作者握持并操作操纵盒,同时避免或减轻使用操纵盒的操作者的疲劳。
[0027]
定义。如在本说明书和所附权利要求中使用的,除非上下文另有要求,否则以下术语应具有所指示的含义:
[0028]
关于两个对象的短语“可移除地固定”是指将第一对象固定到第二对象使得第一对象将第二对象保持在固定位置,而第二对象可从第一对象移除而不会损坏任一对象,并且不必移除紧固件或破坏粘合剂联接。
[0029]“组”包括至少一个成员。
[0030]
图1a至图1d示意性地例示了可以根据例示性实施方式配置的坐标测量机100(以下称为“cmm 100”)。
[0031]
如本领域技术人员所知,cmm是被配置成测量工件180的一个或更多个特征的系统。工件180的例示性实施方式在图1b中示意性地例示。通常,工件180具有指定形状,该指定形状具有指定的尺寸,这些尺寸可以统称为工件180的“几何形状”181。例如,工件180可以具有边182和角183。工件180也可以具有表面,诸如,平坦表面184和弯曲表面185。两个表面相交会产生内角187。此外,如本领域已知的,各个表面可以具有物理特性,诸如,波纹度188和/或表面光洁度189。工件180还可以具有空腔186,该空腔也可以是穿过工件180的孔。如本领域已知的,空腔186可以具有诸如宽度和深度之类的尺寸,这又可以限定空腔186的纵横比。
[0032]
cmm底座
[0033]
在图1a的例示性实施方式中,cmm 100包括具有工作台111的底座110。cmm 100的工作台111限定了通常平行于地板101的平面的x-y平面112、垂直于x-y平面的z轴、以及对应的x-z平面和y-z平面。工作台111还限定了工作台111上方的测量空间113的边界。在一些实施方式中,cmm 100包括被配置成保持一个或更多个测量传感器140的探头架115。cmm 100的可移动部件可以移动到探头架115并将测量传感器140放置到探头架115中,和/或从探头架115移除另一测量传感器140。
[0034]
可移动部件
[0035]
cmm 100还具有可移动特征(统称为120),这些可移动特征被布置成将测量传感器140(在一些实施方式中,多个这样的设备)相对于工件180进行移动和定向。如下所述,cmm 100的可移动特征被配置成将测量传感器140相对于工件180在一个维度上(x轴;y轴;或z轴)、二个维度上(x-y平面;x-z平面;或y-z平面)、或三个维度上(由x轴、y轴和z轴限定的体积)进行移动和定向。因此,cmm 100被配置成测量工件180的一个或更多个特征的位置。
[0036]
图1a的cmm 100被称为“桥式”cmm。桥式cmm 100的可移动特征120包括桥123,桥123通过支腿121可移动地联接到底座110。桥123和支腿121可相对于底座110沿着y轴可控地移动。
[0037]
为了促进支腿相对于底座110的运动,支腿121可以通过一个或多个轴承128联接到底座110。如本领域已知的,轴承可以是滚柱轴承或空气轴承,仅举几个例子。
[0038]
可移动特征还包括可移动地联接到桥123的滑架125。该滑架被配置成沿着桥123
在x轴上可控地移动。滑架125沿着桥123的位置可以通过在工作上联接到桥123的桥标尺124来确定。
[0039]
主轴126可移动地联接到滑架125。主轴126被配置成在z轴上可控地移动。主轴126在z轴上的位置可以通过在工作上联接到主轴126的主轴标尺127来确定。测量传感器140在工作上联接到主轴126。因此,测量传感器140可相对于测量空间113中的工件180在三个维度上可控地移动。
[0040]
在一些实施方式中,测量传感器140通过铰接臂130可移动地联接到主轴126。例如,测量传感器140可以通过可移动接头131可移动地联接到臂130。可移动接头131允许相对于臂130可控地调整测量传感器140的取向,从而为测量传感器140提供x轴、y轴和/或z轴上的附加自由度。
[0041]
在通常可以被称为“龙门式”cmm的其他实施方式中,支腿121站立在地板101上,并且测量空间113是相对于地板101限定的。
[0042]
在又一些实施方式中,测量传感器140固定到底座110(即,不能相对于底座110移动),并且工作台111可相对于测量传感器140在一个维度、二个维度或三个维度上移动。在一些坐标测量机中,工作台111也可以是可在x-y平面中旋转的。在这样的实施方式中,cmm 100使工件180相对于测量传感器移动。
[0043]
在通常可以被称为“水平臂式”cmm的其他实施方式中,桥123可移动地联接到底座110以在z轴上延伸,并且可沿着y轴可控地移动。在这样的cmm中,臂130可在x轴上可控地延伸,并且可沿z轴在桥123上下可控地移动。
[0044]
在又一些实施方式中,臂130是铰接的。臂130的一端固定至底座110,并且臂130的远端可相对于测量空间113中的工件180在一个维度、二个维度或三个维度上相对于底座110移动。
[0045]
传感器
[0046]
在一些实施方式中,测量传感器140可以是触觉探头(被配置成通过使探头尖端与工件180接触来检测工件180上的点的位置,如本领域已知的)、诸如本领域已知的电容式探头或电感式探头之类的非接触式探头(被配置成在不与工件180物理接触的情况下检测工件180上的点的位置),或光学探头(被配置成通过光学方式检测工件180上的点的位置),仅举几个例子。
[0047]
在一些实施方式中,测量传感器140是“看到”工件180的视觉传感器。这种视觉传感器可以是能够聚焦在工件180或测量区域113上并且被配置成捕获和记录静止图像或视频图像的摄像头。可以分析此类图像和/或此类图像内的像素以:定位工件180;确定工件180的放置和/或取向;识别工件180;和/或测量工件180,仅举几个例子。
[0048]
cmm 100的一些实施方式可以包括一个或不止一个摄像头141,摄像头141被配置成使得测量包络(measurement envelope)113处于摄像头141的视场内。这种摄像头141可以是测量传感器140的补充。摄像头141可以是被配置成捕获测量包络113、cmm 141上的工件180和/或cmm 100周围环境的静止图像和/或视频图像的数字摄像头。这样的图像可以是彩色图像、黑白图像和/或灰度图像,并且摄像头141可以将这样的图像输出为数字数据、离散像素或模拟形式。
[0049]
cmm 100的一些实施方式还可以包括环境传感器142,该环境传感器142被配置成
测量放置有cmm的环境102的一个或更多个特性,并且一些实施方式可以具有不止一个这样的环境传感器142。例如,环境传感器142可以被配置成测量cmm 102周围大气的温度、压力或化学成分。环境传感器142也可以是运动传感器,诸如,加速度计或陀螺仪,其被配置成测量cmm的例如由cmm 100附近的人或对象的运动引起的振动。环境传感器142还可以是被配置成测量环境102中的环境光的光检测器,该环境光可能例如干扰光学传感器或视觉传感器的操作。在又一实施方式中,环境传感器142可以是声音传感器,诸如,麦克风,其被配置成检测环境中的声能。
[0050]
在操作中,cmm 100通过这样的方式来测量工件180:相对于工件180来移动测量传感器140,以对工件180进行测量。
[0051]
控制系统
[0052]
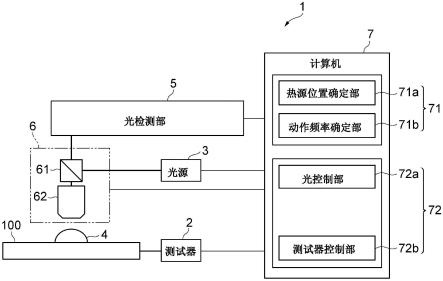
cmm 100的一些实施方式包括被配置成控制cmm 100和处理由cmm获取的数据的控制系统150(或“控制器”或“控制逻辑”)。图1c示意性地例示了控制系统150的实施方式,该控制系统150具有通过总线151进行电子通信的若干模块。
[0053]
通常,这些模块中的一些或全部模块可以在一个或更多个集成电路中实现,诸如,asic、门阵列、微控制器或定制电路,并且至少一些模块可以在能够在计算机处理器157上执行的非暂时性计算机实现代码中实现。
[0054]
一些实施方式包括计算机处理器157,其可以是可从英特尔公司获得的微处理器,或处理器内核的实现,诸如,arm内核,仅举几个例子。计算机处理器157可以具有用于存储数据和/或计算机代码的板载非暂时性数字存储器(例如,ram或rom),该存储器包括用于实现控制系统操作和方法中的一些或全部的非暂时性指令。另选地或附加地,计算机处理器157可以在工作上联接到其他非暂时性数字存储器,诸如,ram或rom,或者用于存储这种计算机代码和/或控制数据的可编程非暂时性存储器电路。因此,控制器150的一些或全部功能可以在被配置成在计算机处理器上执行的软件中实现。
[0055]
控制系统150包括通信接口152,该通信接口152被配置成与cmm 100的其他部分进行通信,或经由通信链路176与诸如计算机170之类的外部设备进行通信。为此,通信接口152可以包括各种通信接口,例如以太网连接、usb端口或火线端口,仅举几个例子。
[0056]
控制系统150还包括传感器输入端155,该传感器输入端155在工作上联接到一个或更多个传感器,诸如,测量传感器140或摄像头141。传感器输入端155被配置成接收来自传感器的电子信号,并且在一些实施方式中,使用数模(“d/a”)转换器将这些信号数字化。传感器输入端155联接到控制系统150的其他模块以向这些其他模块提供从传感器接收的(数字化的)信号。
[0057]
运动控制器153被配置成引起cmm 100的可移动特征120中的一个或更多个可移动特征120的运动。例如,在计算机处理器157的控制下,运动控制器153可以向cmm 100内的一个或更多个马达发送电控制信号,以使cmm 100的可移动特征120将测量传感器140移动到测量空间113内的各个点,并在这些点处测量工件180。运动控制器153可以响应于存储在存储器模块156中或存储在计算机170中的测量程序,或者响应于使用手动控制器160的操作者的手动控制来控制这种运动,仅举几个例子。
[0058]
由cmm 100进行的测量可以存储在存储器模块156中,该存储器模块156包括非暂时性存储器。存储器模块156还被配置成存储例如:待测量工件180的规格;校准制品的规
格;误差图;以及在计算机处理器157上可执行的非暂时性指令,仅举几个例子。此类指令尤其可以包括:用于控制用于测量工件180和/或校准制品的cmm100的可移动特征的指令;用于分析测量数据的指令;以及用于校正测量数据的指令(例如,利用误差图)。
[0059]
测量分析器154被配置成处理从一个或更多个传感器(诸如,测量传感器140)接收的测量数据。在一些实施方式中,测量分析器154可以例如通过以下方式来修正测量数据:利用误差图来修改测量数据,和/或将测量数据与规格进行比较,例如以评估工件180与该工件180的规格之间的偏差。为此,测量分析器154可以是本领域已知的经编程的数字信号处理器集成电路。
[0060]
另选地或附加地,一些实施方式将cmm 100与外部计算机(或“主计算机”)170联接。以类似于控制系统150的方式,主计算机170具有诸如上述那些的计算机处理器,以及与cmm 100的处理器进行通信的非暂时性计算机存储器174。存储器174被配置成保存能够由处理器执行的非暂时性计算机指令,和/或存储非暂时性数据,诸如,作为对底座110上的对象180的测量结果而获取的数据。
[0061]
主计算机170尤其可以是台式计算机、塔式计算机或膝上型计算机,诸如可从dell inc.获得的那些计算机,或者甚至是平板计算机,例如可从apple inc.获得的ipad
tm
。除了计算机存储器174之外,主计算机170还可以包括存储器接口175,诸如,用于存储卡的usb端口或插槽,该usb端口或插槽被配置成与非暂时性计算机可读介质联接并且使得能够在计算机170与计算机可读介质之间传输计算机代码或数据,等等。
[0062]
cmm 100与主计算机170之间的通信链路176可以是诸如以太网电缆之类的硬连线连接,或者是诸如蓝牙链路或wi-fi链路之类的无线链路。例如,主计算机170可以包括在使用或校准期间控制cmm 100的软件,和/或可以包括被配置成处理在cmm 100操作期间获取的数据的软件。此外,主计算机170可以包括被配置成允许用户手动操作cmm 100的用户界面。在一些实施方式中,cmm和/或主计算机170可以经由网络178联接到一台或更多台其他计算机,诸如,服务器179。网络178可以是局域网或因特网,仅举两个例子。
[0063]
因为底座110与工件180的相对位置是通过cmm 100的可移动特征的动作确定的,所以cmm 100可以被认为知道底座110与工件180的相对位置。更具体地,计算机处理器157和/或计算机170控制和存储关于可移动特征的运动的信息。另选地或另外地,一些实施方式的可移动特征包括对工作台111和/或测量传感器140的位置进行感测并将该数据报告给计算机222或150的传感器。关于cmm 100的工作台和/或测量传感器140的运动和位置的信息可以按照以cmm 100上的点为参考的一维(例如,x、y、z)、二维(例如,x-y;x-z;y-z)或三维(x-y-z)坐标系来记录。
[0064]
手动用户界面
[0065]
一些cmm还包括手动用户界面160。如图所示,手动用户界面160可以具有允许用户手动操作cmm 100的控件(例如,按钮;旋钮等)。界面160尤其可以包括使用户能够改变测量传感器140相对于工件180的位置的控件。例如,用户可以使用控件161在x轴上移动测量传感器140、使用控件162在y轴上移动测量传感器140、和/或使用控件163在z轴上移动测量传感器140。
[0066]
如果测量传感器140是视觉传感器,或者如果cmm 141包括摄像头141,则用户可以使用控件165手动移动传感器140、摄像头141或者改变视觉传感器和/或摄像头的视场。用
户还可以使用控件166(其在一些实施方式中可以是可转动旋钮)来使视觉传感器和/或摄像头141聚焦,并且使用控件167进行捕获和成像,或控制视频的录制。
[0067]
因此,可移动特征可以对手动控制做出响应或者在计算机处理器157的控制之下,以使底座110和/或测量传感器140相对于彼此移动。因此,这种布置允许被测量的对象从各种角度以及在各种位置呈现给测量传感器140。
[0068]
移动控制器
[0069]
图2a、图2b、图2c、图2d、图2e、图2f和图2g示意性地例示了可以被称为操纵盒(或“挂件”)200的移动控制器的实施方式的视图和特征。
[0070]
操纵盒200不固定至坐标测量机100,因为操纵盒200的位置可相对于坐标测量机100移动。操纵盒200的移动性允许坐标测量机100的操作者相对于坐标测量机100移动以及相对于坐标测量机100所操作于的工件180移动。这种移动性可以允许操作者出于安全原因或者为了获得坐标测量机100或工件180的更广阔视野而远离坐标测量机100移动。与使用固定控制台或计算机170相比,操纵盒200的移动性还允许操作者移动得更靠近坐标测量机100及其所操作于的工件180,以便例如检查或调整工件180的位置或取向,或者坐标测量机100的操作。
[0071]
为此,操纵盒200与控制系统150进行数据通信,并且可以通过系绳201可移动地联接到控制系统150。在一些实施方式中,操纵盒200经由系绳201(其可以是以太网电缆、usb电缆或火线电缆,仅举几个例子)与控制系统150的通信接口152进行数据通信,如图1a示意性所示,在其他实施方式中,操纵盒200经由诸如蓝牙连接等的无线通信链路与控制系统150的通信接口152进行数据通信。
[0072]
操纵盒200包括便于操作者控制坐标测量机100的许多特征。例如,图2a的实施方式包括具有顶侧面211、底侧面212、左侧面213、右侧面214的壳体210。壳体210还具有面向控制坐标测量机100的操作者的正面220以及与正面220相反的背面260。侧面211至214、前底座220和背面260限定了操纵盒的内部219,该内部可以包括使操纵盒能够在其显示屏231上显示信息并且对来自控件230的操作者输入做出响应的电路。
[0073]
操纵盒200的一些实施方式包括显示屏231,其被配置成向cmm操作者显示关于坐标测量机100的操作的信息。
[0074]
操纵盒200的一些实施方式在正面220上具有一个或更多个控件230。例如,在图2a的实施方式中,显示屏231是被配置成接收用户(或“操作者”)输入(例如,诸如屏幕轻敲、滑动等触觉用户输入)的触摸屏。图2a的实施方式的控件230还包括左操纵杆232、右操纵杆233、可转动旋钮(或滚珠)234、可转动轮235和若干按钮241至248(统称为240)。
[0075]
控件230中的各个控件可以被配置成接收来自操作者的输入,并且通过引起相关联的动作来做出响应。例如,转动旋钮234或轮235可以引起显示屏231改变其上显示的图形,或者可以引起操纵盒200使坐标测量机100的可移动特征120移动。
[0076]
在一些实施方式中,当操作者分别用操作者的左手和右手握持操纵盒200的左侧面213和右侧面214时,控件230中的至少一些控件可由操作者的拇指触及。然而,在一些实施方式中,当以这种方式握持时,操作者的拇指无法触及控件230中的至少一个控件。例如,可转动旋钮234可能被设置成使得普通人大小的操作者的拇指的触及范围不足以操作该可转动旋钮234。
[0077]
在一些实施方式中,引起坐标测量机100的可移动特征120移动的控件230可以仅在另一控件(例如,背面控件250)被激活时启用。例如,在一些实施方式中,背面控件250是一个或更多个按钮(251和/或252)的组。在这样的实施方式中,仅当背面控件250(例如,按钮251和/或252)被按下或按住时,引起坐标测量机100的可移动特征120移动的控件230才可以这样做(例如,被启用)。换言之,在一些实施方式中,背面控件250被配置成在第一位置或第一状态下启用使用操纵盒控件230对坐标测量机100的可移动特征120进行的操作者控制,并且被配置成在第二位置或第二状态下禁用使用操纵盒控件230对坐标测量机100的该可移动特征120进行的操作者控制。
[0078]
相对于诸如美国专利8,581,855的装置之类的现有技术设备,操纵盒200更大,这例如是由于显示屏231及其数量和控件230的布置。
[0079]
操纵盒200也可以受益于比现有技术设备更坚固或更耐用。例如,诸如x-box控制器之类的游戏控制器被构造成能够承受在典型的铺有地毯的家庭房间中的生活。相比之下,操纵盒200被构造成能够经受工业环境,在工业环境中,它可能被粗暴地处置,并且可能受到与诸如混凝土地板和/或坐标测量机100的部分之类的硬表面的撞击。例如,操纵盒200的一些实施方式被配置成经受住从6英尺高的若干次掉落和浸没在水中达30秒。
[0080]
为此,发明人发现壳体210可以受益于结构支撑,例如壳体210内的内部肋。这种肋使壳体210比其他情况下更硬。
[0081]
另一方面,它的尺寸和坚固耐用的构造,往往使操纵盒200比它本来应该的更大和更重,并且比现有技术的控制器更重和更大。这样的体积和重量可能使操纵盒200对于操作者来说更难以握持和使用。此外,握持操纵盒200的时间越长,这样的体积和重量可能会增加操作者的疲劳,尤其是当操作者用一只手握持操纵盒200以例如腾出第二只手来操纵控件230时。
[0082]
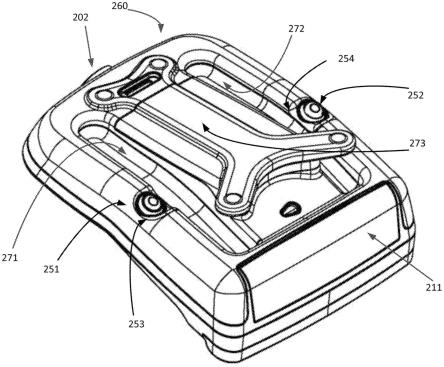
因此,操纵盒200的例示性实施方式包括从壳体210的背面260延伸的一个或更多个人体工程学装置270。人体工程学装置270被配置和设置成允许操作者握持和操作操纵盒200,同时避免或减轻使用操纵盒200的操作者的疲劳。
[0083]
人体工程学装置270的一个实施方式是从背面260向外延伸的抓握部273,该抓握部273被成形和设置成允许cmm操作者用单手抓握抓握部273并支撑操纵盒200,以便允许cmm操作者用另一只手操纵正面控件230中的至少一者。例如,在一些实施方式中,抓握部273可被描述为具有“t”形、“y”形或骨形或叉骨形。
[0084]
在一些实施方式中,抓握部273也是设置在壳体210内部的电池盒205的盖。在例示性实施方式中,抓握部273被成形和设置成可配对地联接到另一装置(例如,托架、充电架或保持架)上的接纳器(或嵌套件),以便在该抓握部与接纳器配对时被可移除地固定到托架。在一些实施方式中,抓握部还可以包括电导管(例如,电源端口265)以将电力从充电架(或托架)传输至电池盒中的电池。
[0085]
人体工程学装置270的另一实施方式是从背面260的表面向内延伸的至少一个凹形沟槽271(和/或272)的组。凹形沟槽271被成形为接纳操作者的一根或更多根手指,优选地,操作者的手的三根外侧手指(小指、无名指和中指),并且允许cmm操作者用单手抓握操纵盒200并支撑操纵盒200,以便允许操作者用另一只手操纵正面控件230中的至少一者。在优选实施方式中,凹形沟槽271设置在操纵盒200的边缘215附近,以方便操作者将该操作者
的手指伸入凹形沟槽271中,并便于凹形沟槽271接纳操作者的手指。
[0086]
优选实施方式包括两个这样的凹形沟槽271、272的组,各个凹形沟槽设置在相应边缘215、216附近。这使得操作者能够用左手或右手抓握操纵盒200并支撑操纵盒200,以使操作者能够用另一只手操纵正面控件230中的至少一者。在一些实施方式中,凹形沟槽271和272彼此平行。
[0087]
在一些实施方式中,一个或更多个凹形沟槽271和/或272被配置成使得操纵盒200被保持在操作者的手的指尖与球状部位(操作者的手的球状部位是手掌上的这样的部分:手指从该部分离开手掌;通常是指远端手掌折痕与手掌手指折痕之间的区域)之间(由指尖和球状部位固定),而不是保持在手指与手掌中心之间。这与被保持(被配置成保持)在玩家的手的手指表面与手掌中心之间的现有技术控制器不同。例如,本领域已知的标准x-box控制器具有两个球状突起,各个球状突起被配置成保持在玩家的手的手指表面与手掌中心之间。
[0088]
这样,例如,凹形沟槽271或者凹形沟槽271和272的组被配置成减少或至少减轻操作者的手的疲劳,因为操作者的手掌不用于抓握控制器;和/或被配置成允许操作者的拇指的运动和/或触及范围有更大的灵活性,因为手掌不需要靠在控制器上,因此可以移动到操纵盒200的顶面220/在操纵盒200的顶面220的边缘上方拱起。
[0089]
例示性实施方式包括一个或更多个背面按钮。例如,图2c的实施方式包括第一背面按钮251和第二背面按钮252。背面按钮251和252优选地设置在操纵盒200的背面260的左右边缘附近。
[0090]
在优选实施方式中,各个背面按钮251和252设置在操纵盒200的沟槽(分别为271和272)与最近侧(分别为215和216)之间。在这样的构造中,操作者可以将手指(例如,食指(forefinger)、食指(index finger)、中指)从沟槽中抬起,并且通过将该手指朝向操作者的手掌卷曲,可以将该手指带到按钮(271或272)并按下或以其他方式激活该按钮。此外,在一些实施方式中,操纵盒200包括对应于各个按钮(分别为251、252)的凹部(253、254),并且各个这样的按钮设置在凹部(分别为253、254)内。当如此设置时,各个凹部253、254防止或至少减少了操作者无意中用该操作者的手的另一部分(例如手掌)按下或以其他方式激活按钮251、252的机会。
[0091]
图3a、图3b、图3c、图3d、图3e、图3f、图3g和图3h示意性地例示了操纵盒200的另一实施方式。
[0092]
图3d示意性地例示了操纵盒200的侧视图,图3f和图3g示意性地例示了操纵盒200沿着线a-a的截面。图3f示意性地例示了沟槽271和272的截面,并且还示出了分别设置在沟槽271和272外侧的背面按钮251和252的位置,使得各个背面按钮251和252设置在沟槽(271、272)与边缘(分别为215、216)之间,该边缘形成在操纵盒200的底表面260与操纵盒200的侧面(分别为213、214)的交接处。
[0093]
图3d和图3e还示意性地例示了从操纵盒200的背面260延伸的把手310。把手310提供了允许操作者例如在不使用操纵盒200时握持和携带操纵盒200的方便结构。即使当系绳201联接到操纵盒的正面212上的端口202时,把手310的在操纵盒210的背面211附近的位置也允许操作者握持把手310。在一些实施方式中,把手310按照平行于操纵盒200的背面260的方式延伸,以在操纵盒200搁置在平坦表面上时为操纵盒200提供额外的稳定性。在图3d
的实施方式中,把手310限定了宽度为26.4mm的孔311,因此允许操作者的手进入。在图3e的实施方式中,把手的长度为104.3mm。
[0094]
为了便于通过操作者的一只手或双手握持操纵盒200,操纵盒200具有从背面260到顶面220的厚度,该厚度大约等于普通成年人手掌的大小,使得操作者的手指可以伸入沟槽(271、272),同时操作者的拇指可以触及操纵盒200的顶面220上的控件230中的至少一些,并且操作者的手掌沿着控制器的侧面213延伸。例如,如图3f中示意性所示,操纵盒200的从底部260到顶面220的厚度为58.0mm。出于同样的原因,沟槽271从操纵盒200的侧面213测量时是偏移的,以便允许操作者的手掌和/或手指环绕操纵盒200的边缘215,同时允许操作者的手指伸入沟槽271以抓住并握持操纵盒200。
[0095]
在该实施方式中,各个沟槽271、272限定了外侧表面277、内侧表面279和顶表面279。侧表面277、278限定了沟槽宽度,该实施方式得沟槽宽度为27.6mm。顶表面279限定了沟槽深度,在该实施方式中,沟槽深度在其最深点处为19.0mm。
[0096]
如图3g示意性所示,在例示性实施方式中,顶表面279是弯曲的,使得沟槽的深度朝向操纵盒200的最近侧更深。换言之,随着顶表面279远离操纵盒200的侧面213延伸,顶表面朝向操纵盒200的底部260弯曲。在这样的构造中,顶表面弯曲以与操作者的一根或多根手指的表面相接,以便于操作者的手指支撑操纵盒200。
[0097]
托架
[0098]
图4a、图4b、图4c、图4d、图4e和图4f示意性地例示了被配置成保持操纵盒200的托架400。图4b示意性地例示了托架400的前视图,图4c示意性地例示了托架400的右侧视图,图4d示意性地例示了托架400的后视图,图4e示意性地例示了托架400的俯视图,图4f示意性地例示了托架400的仰视图。图3a和图3c各自示意性地例示了支撑在托架400上和/或联接托架400的操纵盒200。在一些实施方式中,图2a的实施方式也可以由托架400支撑和/或联接到托架400。
[0099]
托架400具有底座410,该底座410被配置成平放在诸如桌面之类的表面上。
[0100]
托架400还具有被配置成接纳操纵盒200的嵌套件430(或“接纳器”)。在例示性实施方式中,嵌套件430被配置成接纳操纵盒200并且将操纵盒200可移除地联接到托架400。为此,嵌套件430的例示性实施方式具有与操纵盒200的形状互补的形状,使得操纵盒200与嵌套件430配对,并且托架400由此支撑和保持操纵盒200。在优选实施方式中,嵌套件430的形状和尺寸被选择成使得操纵盒200或操纵盒200的一部分压配合或卡扣配合到嵌套件430中,使得嵌套件430牢固地但可移除地保持操纵盒200。在这样的实施方式中,嵌套件430可以被描述为被配置成将操纵盒200可移除地固定到托架400。
[0101]
一个或更多个侧壁(或“支腿”)421至424的组在底座410与嵌套件430之间延伸,以将嵌套件430和任何附接的操纵盒200保持在距底座430固定距离处。
[0102]
图4a的实施方式包括四个侧壁421至424,各个侧壁支撑对应的插槽431至434。各个插槽431至434具有与操纵盒200的对应特征互补的凹形形状。插槽431至434共同地限定了嵌套件430。
[0103]
侧壁421和侧壁423在它们之间限定了左抓握孔(或“左抓握间隙”)426,侧壁422和侧壁424同样在它们之间限定了右抓握孔(或“右抓握间隙”)427。各个抓握孔426、427被配置成(例如,尺寸设计成和定位成)接纳操作者的手以允许操作者的手指触及嵌套件中的操
纵盒200的背面260,并且释放操纵盒200并将其抬出嵌套件430。在例示性实施方式中,各个抓握孔426、427被配置成(例如,尺寸设计成和定位成)允许操作者的手在操纵盒200被固定在嵌套件430中时触及并激活操纵盒200的背面按钮(551、552)。
[0104]
侧壁423和侧壁424在它们之间限定了顶部孔428。顶部孔428被配置成(例如,尺寸设计成和设置成)允许电缆在操纵盒200被固定在嵌套件430中时触及并联接到操纵盒200上的辅助端口203(例如,电源端口或通信端口)。
[0105]
侧壁421和侧壁422在它们之间限定了底部孔429。底部孔429被配置成(例如,尺寸设计成和设置成)允许电缆(例如,201)在操纵盒200被固定在嵌套件430中时触及并联接到操纵盒200上的系绳端口202。
[0106]
在一些实施方式中,底座410与嵌套件430之间的距离使得当操纵盒200设置在嵌套件430中时,托架输出接口与操纵盒200上的对应接口进行电力和/或通信联系。以此方式,来自托架400的电力和/或通信被提供给操纵盒200,以允许操纵盒200在处于托架400中时可操作和/或充电。
[0107]
托架输入接口
[0108]
托架400的一些实施方式包括输入接口450,该输入接口450被配置成接收电力信号和/或通信信号,以将这些信号提供给托架400上的操纵盒200。例如,输入接口450的一个实施方式包括被配置成接纳电力电缆的电源连接器451,该电力电缆将电力输送到电源连接器451。输入接口450的另一实施方式包括通信连接器452,该通信连接器452被配置成接纳通信电缆,例如,电缆201(图1a),该通信电缆向托架400提供通信信号和/或携带来自托架400的通信信号。输入接口的一些实施方式包括电源连接器451和通信连接器452两者。在输入接口450的一些实施方式中,单个连接器被配置为电源连接器451和通信连接器452两者。
[0109]
托架输出接口
[0110]
托架400的一些实施方式包括输出接口460,该输出接口460被配置成向托架400上的操纵盒200(例如,固定在嵌套件430中的操纵盒200)提供电力信号和/或通信信号。在例示性实施方式,输出接口460与输入接口450进行电通信,以将电力和/或通信信号从输入接口450传输到输出接口460,并最终传输到嵌套件430中的操纵盒200。
[0111]
为此,输出接口460的例示性实施方式包括电源接口465,该电源接口465被配置成与操纵盒200上的电源端口265连接并且设置在托架400上,使得当操纵盒200设置在嵌套件430中时电源接口465联接到这样的电源端口265。
[0112]
输出接口460的例示性实施方式还包括通信接口461,该通信接口461被配置和设置成当操纵盒200设置在嵌套件430中时,与操纵盒200上的对应通信端口361进行通信。
[0113]
本发明的各种实施方式的特征可以在于本段落之后的段落(并且在本技术末尾提供的实际权利要求之前)中列出的潜在权利要求。这些潜在权利要求形成了本技术书面描述的一部分。因此,在涉及本技术或基于本技术要求优先权的任何申请的后续程序中,以下潜在权利要求的主题可作为实际权利要求呈现。列入这种潜在权利要求不应该被解释为意味着实际权利要求没有涵盖潜在权利要求的主题。因此,在后续程序中不提出这些潜在权利要求的决定不应该被解释为将主题捐赠给公众。
[0114]
非限制地,可要求保护的潜在主题(以字母“p”开头,以避免与下文提出的实际权
利要求相混淆)包括:
[0115]
p1.一种用于使cmm操作者能够控制坐标测量机的移动控制器,所述移动控制器包括:壳体,所述壳体具有顶面和与所述顶面相反的背面;多个正面控件,所述多个正面控件设置在所述顶面上,其中,当所述cmm操作者用双手握持所述移动控制器的侧面时,所述正面控件中的至少一些正面控件能够被所述cmm操作者的拇指触及;以及人体工程学装置,所述人体工程学装置从所述背面延伸,所述人体工程学装置被配置成使所述cmm操作者能够握持所述移动控制器,同时减轻所述cmm操作者的手和手指的疲劳。
[0116]
p2.根据p1所述的移动控制器,其中,所述人体工程学装置包括:抓握部,所述抓握部从所述背面向外延伸,所述抓握部被成形和设置成允许所述cmm操作者用单手抓握所述抓握部并支撑所述移动控制器,以使所述cmm操作者能够用所述cmm操作者的另一只手操纵所述正面控件中的至少一个正面控件。
[0117]
p3.根据权利要求2所述的移动控制器,其中,所述抓握部具有t形形状。
[0118]
p4.根据p1至p3中任一项所述的移动控制器,其中,所述人体工程学装置包括:凹形沟槽,所述凹形沟槽从所述背面的表面向内延伸并且设置在所述背面的边缘附近,并且被成形为接纳所述cmm操作者的手的三根外侧手指,所述凹形沟槽被配置成使所述cmm操作者能够同时:用单手抓握所述移动控制器并支撑所述移动控制器,并且用所述cmm操作者的另一只手操纵所述正面控件中的至少一个正面控件。
[0119]
p5.根据p1至p4中任一项所述的移动控制器,其中,所述人体工程学装置包括:一组凹形沟槽,所述一组凹形沟槽从所述背面的表面向内延伸,所述沟槽中的各个沟槽设置在所述背面的边缘附近,所述凹形沟槽中的各个凹形沟槽被成形为接纳所述cmm操作者的手的三根外侧手指,以使所述cmm操作者能够同时:用单手抓握所述移动控制器并支撑所述移动控制器,并且用所述cmm操作者的另一只手操纵所述正面控件中的至少一个正面控件。
[0120]
p6.根据权利要求5所述的移动控制器,其中,所述一组凹形沟槽包括彼此平行的两个凹形沟槽,所述两个凹形沟槽中的各个凹形沟槽设置在所述移动控制器的两个相应边缘附近。
[0121]
p7.根据p1至p6中任一项所述的移动控制器,所述移动控制器还包括显示屏,所述显示屏设置在所述壳体的顶面上或顶面处,以便向所述cmm操作者呈现关于所述坐标测量机的操作的信息。
[0122]
p8.根据p7所述的移动控制器,其中,所述显示屏包括触摸屏,所述触摸屏被配置成从所述cmm操作者接收用于控制所述坐标测量机的控制输入。
[0123]
p9.根据p1至p8中任一项所述的移动控制器,其中,当所述cmm操作者利用所述人体工程学装置用双手握持移动控制器的相应的侧面时,所述正面控件中的至少一个正面控件无法被所述cmm操作者的拇指触及。
[0124]
p10.根据p1至p9中任一项所述的移动控制器,所述移动控制器还包括:背面控件,所述背面控件设置在所述移动控制器的所述背面上,所述背面控件被配置成对操作者操纵做出响应以:在第一状态下,响应于操作者操纵正面控件而启用对所述坐标测量机的可移动特征的操作者控制;以及在第二状态下,响应于所述操作者操纵所述正面控件而禁用对所述坐标测量机的该可移动特征的操作者控制。
[0125]
p11.根据p10所述的移动控制器,其中,所述背面控件包括多个按钮,并且其中:所
述背面控件能够通过所述操作者按下所述多个按钮中的至少一个按钮而配置成所述第一状态;并且所述背面控件能够通过所述操作者释放所述多个按钮中的所有按钮而配置成所述第二状态。
[0126]
p12.根据p11所述的移动控制器,其中,所述背面控件能够通过所述操作者同时按下所述多个按钮中的至少两个按钮而配置成所述第一状态。
[0127]
p13.根据p10至p12中任一项所述的移动控制器,所述移动控制器还包括对应于所述多个按钮中的按钮的凹部,其中,所述按钮设置在所述凹部内,使得所述凹部防止或至少减少操作者无意中用操作者的手的一部分按下或以其他方式激活按钮的机会。
[0128]
p21.一种托架,所述托架包括:底座,所述底座被配置成搁置在平坦表面上;以及嵌套件,所述嵌套件从所述底座悬置,所述嵌套件被配置成接纳操纵盒并将所述操纵盒能够移除地联接到所述托架。
[0129]
p22.根据p21所述的托架,所述托架还包括:一组侧壁,所述一组侧壁在所述底座与所述托架之间延伸,所述一组侧壁将所述托架从所述底座悬置。
[0130]
p23.根据p21至p22中任一项所述的托架,所述托架还包括一组抓握孔,各个抓握孔被配置成接纳操作者的手以允许手指触及所述嵌套件中的操纵盒的背面并将所述操纵盒抬出所述嵌套件。
[0131]
p24.根据p23所述的托架,其中,所述一组抓握孔中的至少一个抓握孔被配置成允许所述操作者的手在所述操纵盒被固定在所述嵌套件中时触及并激活操纵盒的背面按钮。
[0132]
p25.根据p21至p24中任一项所述的托架,所述托架还包括输入电接口,所述输入电接口被配置成接收电力和通信信号。
[0133]
p26.根据p25所述的托架,所述托架还包括输出电接口,所述输出电接口被配置成向固定在所述嵌套件中的操纵盒提供电力和通信信号。
[0134]
p27.根据p1至p26中任一项所述的托架,其中,所述操纵盒包括根据p1至p13、p31至p35中任一项所述的移动控制器或者p41至p42中任一项所述的操纵盒。
[0135]
p31.一种坐标测量机移动控制器(或“操纵盒”),其包括:具有正面和背面以及内部的壳体,所述正面包括多个控制致动器;设置在内部壳体内的控制电子器件,所述控制电子器件响应于人类操作者对控制致动器的操纵而产生控制信号,以控制坐标测量机的可移动特征的运动;通信接口,所述通信接口被配置成将控制信号传送到坐标测量机;以及位于壳体背面上的物理操作者界面,所述物理操作者界面形成从背面延伸到内部的至少两个凹形沟槽,所述沟槽被设置成允许操作者的手指用单手握持控制器,同时用操作者的手中的另一只手(第二只手)操纵致动器。
[0136]
p32.根据p31所述的坐标测量机移动控制器,其中,所述沟槽被设置成允许操作者的手指将控制器握持在面向操作者的位置,使得所述控制器被设置成允许操作者的手指用单手握持控制器,同时用第二只手操纵致动器。
[0137]
p33.根据p31至p32中任一项所述的坐标测量机移动控制器,其中,所述致动器选自包括旋钮、按钮和触摸屏上的图标的类别。
[0138]
p34.根据p31至p33中任一项所述的坐标测量机移动控制器,所述坐标测量机移动控制器还包括位于背面上的抓握部,所述抓握部被配置成将控制器固定到充电站。
[0139]
p35.根据p31至p34中任一项所述的坐标测量机移动控制器,其中,所述沟槽中的
至少一个沟槽设置得邻近控制器的相应侧,使得操作者的手的手掌平靠(seat flat against)在控制器的相应侧上,同时所述手的手指伸入沟槽中,使操作者能够用所述手握持控制器。
[0140]
p41.一种操纵盒,所述操纵盒包括:壳体,所述壳体具有顶面和与所述顶面相反的背面;控制装置,所述控制装置用于接收操作者输入以控制坐标测量机的可移动特征,所述控制装置设置在所述操纵盒的所述顶面上;以及人体工程学握持装置,所述人体工程学握持装置用于使操作者能够握持所述移动控制器,同时减轻所述cmm操作者的手和手指的疲劳,所述人体工程学握持装置从所述操纵盒的所述背面延伸。
[0141]
p42.根据p41所述的操纵盒,其中,所述人体工程学握持装置包括:凹形沟槽,所述凹形沟槽从所述背面向内延伸,所述凹形沟槽:设置在所述背面的边缘附近,并且被成形为接纳所述操作者的手的三根外侧手指,以使所述cmm操作者能够:用单手抓握所述操纵盒并支撑所述操纵盒,并且同时用所述操作者的另一只手操纵正面控件装置。
[0142]
以下是本文使用的附图标记列表:
[0143]
100:坐标测量机;
[0144]
101:地板;
[0145]
102:环境;
[0146]
110:底座;
[0147]
111:工作台;
[0148]
112:平面;
[0149]
113:测量包络;
[0150]
115:探头架;
[0151]
120:可移动特征;
[0152]
121:桥支腿;
[0153]
122:工作台标尺;
[0154]
123:桥;
[0155]
124:桥标尺;
[0156]
125:滑架;
[0157]
126:主轴;
[0158]
127:主轴标尺;
[0159]
128:轴承;
[0160]
130:臂;
[0161]
131:可移动接头;
[0162]
132:旋转编码器;
[0163]
140:测量传感器;
[0164]
141:摄像头;
[0165]
142:环境传感器;
[0166]
150:控制系统;
[0167]
151:总线;
[0168]
152:通信接口;
[0169]
153:运动控制器;
[0170]
154:测量分析器;
[0171]
155:传感器输入端;
[0172]
156:存储器;
[0173]
157:计算机处理器;
[0174]
160:用户界面;
[0175]
161:x轴控件;
[0176]
162:y轴控件;
[0177]
163:z轴控件;
[0178]
165:摄像头运动控件;
[0179]
166:摄像头聚焦控件;
[0180]
167:摄像头记录控件;
[0181]
170:主计算机;
[0182]
171:屏幕;
[0183]
172:键盘;
[0184]
173:鼠标;
[0185]
174:计算机存储器;
[0186]
175:存储器接口/通信端口;
[0187]
176:通信链路;
[0188]
178:网络;
[0189]
179:服务器;
[0190]
180:工件;
[0191]
181:几何形状;
[0192]
182:边缘;
[0193]
183:角;
[0194]
184:平坦表面;
[0195]
185:弯曲表面;
[0196]
186:空腔;
[0197]
187:内角;
[0198]
188:波纹度;
[0199]
189:表面光洁度;
[0200]
200:操纵盒;
[0201]
201:系绳;
[0202]
202:系绳端口;
[0203]
203:电源端口或通信端口;
[0204]
205:电池盒;
[0205]
210:壳体;
[0206]
211:壳体顶部;
[0207]
212:壳体底部;
[0208]
213:壳体的左侧面;
[0209]
214:壳体的右侧面;
[0210]
215:壳体的左下边缘;
[0211]
216:壳体的右下边缘;
[0212]
219:操纵盒的内部;
[0213]
220:壳体的正面;
[0214]
230:控件,统称;
[0215]
231:显示屏;
[0216]
232:左操纵杆;
[0217]
233:右操纵杆;
[0218]
234:旋钮;
[0219]
235:轮;
[0220]
240:按钮,统称;
[0221]
241:按钮1;
[0222]
242:按钮2;
[0223]
243:按钮3;
[0224]
244:按钮4;
[0225]
245:按钮5;
[0226]
246:按钮6;
[0227]
247:按钮7;
[0228]
248:按钮8;
[0229]
250:安全接口;
[0230]
251:第一背面按钮;
[0231]
252:第二背面按钮;
[0232]
253:第一按钮凹部;
[0233]
254:第二按钮凹部;
[0234]
260:壳体的背面;
[0235]
265:电源端口;
[0236]
270:人体工程学装置;
[0237]
271:左手手指支撑沟槽;
[0238]
272:右手手指支撑沟槽;
[0239]
273:抓握部;
[0240]
310:操纵盒把手;
[0241]
311:把手孔;
[0242]
361:操纵盒通信端口;
[0243]
400:托架;
[0244]
410:托架底座;
[0245]
421至424:托架侧壁;
[0246]
426:左抓握孔;
[0247]
427:右抓握孔;
[0248]
428:顶部托架孔;
[0249]
429:底部托架孔;
[0250]
426:左侧孔;
[0251]
430:嵌套件;
[0252]
431至434:嵌套件插槽;
[0253]
450:托架输入接口;
[0254]
451:托架电源输入连接器;
[0255]
452:托架通信连接器;
[0256]
461:托架通信接口;
[0257]
465:托架电源接口;
[0258]
本发明的各种实施方式可以至少部分地以任何常规的计算机编程语言来实现。例如,一些实施方式可用过程编程语言(例如,“c”)或面向对象的编程语言(例如,“c ”)来实现。本发明的其他实施方式可被实现为预编程的硬件元件(例如,专用集成电路、fpga和数字信号处理器)或其他相关组件。
[0259]
在替代实施方式中,所公开的装置和方法可被实现为与计算机系统一起使用的计算机程序产品。此实现方式可包括固定在诸如非暂时性计算机可读介质(例如,软盘、cd-rom、rom、闪存存储器或固定盘)这样的有形介质上的一系列计算机指令。这一系列计算机指令可实施先前在本文中相对于系统描述的全部或部分功能。
[0260]
本领域技术人员应该理解,这样的计算机指令可用多种编程语言编写,以便与许多计算机体系结构或操作系统一起使用。此外,这样的指令可被存储在诸如半导体、磁性、光学或其他存储器设备这样的任何存储器设备中,并且可使用诸如光学、红外、微波或其他传输技术这样的任何通信技术来传输。
[0261]
此计算机程序产品尤其可被作为附着印刷或电子文档(例如,紧缩套装软件)的可移除介质进行分发,用计算机系统预加载(例如,在系统rom或固定盘上)或通过网络(例如,因特网或万维网)从服务器或电子公告板进行分发。当然,本发明的一些实施方式可被实现为软件(例如,计算机程序产品)和硬件的组合。本发明的其他实施方式被实现为全部是硬件或全部是软件。
[0262]
上述本发明的实施方式仅是例示性的;对于本领域的技术人员来说,许多变化和修改将是明显的。所有这些变化和修改都旨在落入如任何所附权利要求所限定的本发明的范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。