技术特征:
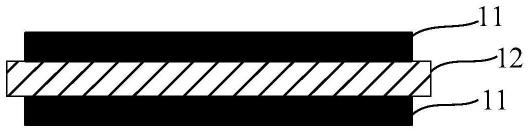
1.一种电子皮肤的电极,其特征在于,包括层叠设置的多个电极层,每一相邻的两所述电极层之间具有绝缘层,所述绝缘层将其相邻的两所述电极层绝缘隔开。2.根据权利要求1所述的电极,其特征在于,所述绝缘层由柔性材料制成,所述电极层是柔性的。3.根据权利要求1所述的电极,其特征在于,所述绝缘层由聚酰亚胺或聚对苯二甲酸乙二醇酯形成的材料制成。4.根据权利要求1所述的电极,其特征在于,所述电极层形成于其相邻一侧的所述绝缘层上。5.根据权利要求1所述的电极,其特征在于,所述电极层的面积不小于4平方厘米,所述电极层能够与接近的导体构成电容。6.根据权利要求1所述的电极,其特征在于,所述电极层的厚度在1微米至500微米的范围之间;或,所述电极层的厚度在10微米至100微米的范围之间;或,所述电极层的厚度在10微米至70微米的范围之间。7.根据权利要求1所述的电极,其特征在于,还包括:两绝缘的保护层,所述保护层由柔性材料制成,两所述保护层分别设置在所述电极的两最外层的所述电极层的外表面上。8.根据权利要求7所述的电极,其特征在于,所述电极中间部分的每一所述电极层的外缘,均被其相邻两侧的所述绝缘层结合包覆;所述电极最外层的每一所述电极层的外缘,均被其相邻的所述保护层和其相邻的所述绝缘层结合包覆。9.根据权利要求1所述的电极,其特征在于,所述电极层包括一体成型的感应区域和连接区域,所述连接区域连接于所述感应区域的一侧边缘,各个所述电极层的感应区域层叠设置,各个所述电极层的连接区域错位设置。10.根据权利要求9所述的电极,其特征在于,各个所述电极层的感应区域对齐设置。11.根据权利要求9所述的电极,其特征在于,每一所述连接区域上均具有裸露的连接点,用于与外部电路电连接。12.一种电子皮肤的电极的生产方法,其特征在于,包括:在第一绝缘层的上、下表面分别形成导电层;通过蚀刻或削铣各个所述导电层分别形成电极层。13.根据权利要求12所述的电极的生产方法,其特征在于,还包括:在多个第二绝缘层的上表面分别形成导电层;通过蚀刻或削铣各个所述导电层分别形成电极层;将所述第一绝缘层作为最底层,各个所述第二绝缘层按照所述电极层朝上依次堆叠在所述第一绝缘层上;将第一绝缘层的边缘和各个所述第二绝缘层的边缘结合。14.根据权利要求13所述的电极的生产方法,其特征在于,所述第一绝缘层和所述第二绝缘层由柔性材料制成,所述电极层是柔性的。15.根据权利要求13所述的电极的生产方法,其特征在于,所述在第一绝缘层的上、下
表面分别形成导电层包括:在所述第一绝缘层的上、下表面通过电沉积或气相沉积或印刷或粘贴导电片形成导电层;所述在多个第二绝缘层的上表面分别形成导电层包括:在多个所述第二绝缘层的上表面通过电沉积或气相沉积或印刷或粘贴导电片形成导电层。16.根据权利要求13所述的电极的生产方法,其特征在于,还包括:在所述电极的两侧分别构造绝缘的保护层,并将所述保护层的边缘与所述第一绝缘层的边缘或所述第二绝缘层的边缘结合。17.根据权利要求13所述的电极的生产方法,其特征在于,所述电极层的厚度在1微米至500微米的范围之间;或,所述电极层的厚度在10微米至100微米的范围之间;或,所述电极层的厚度在10微米至70微米的范围之间。18.根据权利要求13所述的电极的生产方法,其特征在于,所述电极层包括感应区域和连接区域,所述连接区域连接于所述感应区域的一侧边缘,各个所述电极层的感应区域层叠设置,各个所述电极层的连接区域错位设置。19.根据权利要求18所述的电极的生产方法,其特征在于,各个所述电极层的感应区域对齐设置。20.一种电子皮肤,包括检测电路板和如权利1至11中任意一项所述的电极,所述检测电路板具有与所述电极的各个电极层一一对应的多个检测输入端,每一所述电极层均与其对应的所述检测输入端电连接;所述电极层能够与接近的导体构成电容,所述检测电路板用于检测所述电容的电容值。21.一种装置的外壳,其特征在于,包括壳体以及如权利要求20所述的电子皮肤;其中,所述电子皮肤设置于所述壳体之上。22.一种机械臂,其特征在于,包括:本体;控制板;以及若干个如权利要求21所述的装置的外壳,所述装置的外壳设置于所述本体的外表面,所述控制板与所述检测电路板电连接。
技术总结
本发明公开一种电极、电子皮肤、外壳、机械臂及电极的生产方法,其中,电极包括层叠设置的多个电极层,每一相邻的两电极层之间具有绝缘层,绝缘层将其相邻的两电极层绝缘隔开。本发明电极的技术方案,在执行检测的电极层损坏失效时,可切换其它电极层以继续执行检测,无需更换停机更换电极,有效解决了因停机更换电极而影响机械臂工作效率的问题。极而影响机械臂工作效率的问题。极而影响机械臂工作效率的问题。
技术研发人员:黄睿 姜宇 郎需林 邹良俞
受保护的技术使用者:深圳市越疆科技有限公司
技术研发日:2022.02.28
技术公布日:2022/6/10
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。