1.本发明属于齿轮传动技术领域,尤其涉及一种高速齿轮风阻与流场调控的仿真检测方法、设备及介质。
背景技术:
2.目前,齿轮是机械领域的重要组件,已广泛应用于航空航天、轨道交通等领域,并且对高线速度齿轮传动系统的传动效率、承载能力、结构紧凑性等性能指标的要求愈来愈高。高速齿轮传动中,由于流场阻力而产生的风阻功率损失较大,并随着转速升高而逐渐恶化。高速流场状态复杂,流场内的速度分布、压力分布不易获取,给风阻损失的机理分析带来困难,而计算流体力学方法在流体分析领域逐渐得到应用和验证,能有效模拟流场的运动,并获取流场状态参数。但是试验中难以测量风阻和展开相关的调控方案测试,以及流场状态监测与调控问题。
3.通过上述分析,现有技术存在的问题及缺陷为:试验中难以测量风阻和展开相关的调控方案测试,以及流场状态监测与调控问题;对通过齿轮挡板结构实现低能耗、高传动效率的齿轮传动设计及高速齿轮传动系统的改进提升造成困难,相关设计方法多依靠经验实现,缺乏理论依据和支撑。
4.解决以上问题及缺陷的难度为:通过试验能够准确得到挡板结构的应用效果,但挡板结构、挡板方位等多种参数均对结果产生影响,且对于不同齿轮的挡板结构设计存在差异,仅仅依靠试验不利于对挡板结构进行优化设计,造成成本巨大浪费。
5.解决以上问题及缺陷的意义为:本发明采用数值模拟的方法对高速齿轮风阻进行仿真计算,并通过设置挡板对齿轮周围的流场进行调控,从而寻找并验证减小风阻损失的有效措施,对高速齿轮传动效率研究具有重要意义。
技术实现要素:
6.针对现有技术存在的问题,本发明提供了一种高速齿轮风阻与流场调控的仿真检测方法、设备及介质。
7.本发明是这样实现的,一种高速齿轮风阻与流场调控的仿真检测方法,所述高速齿轮风阻与流场调控的仿真检测方法包括:
8.步骤一,在solidworks中建立齿轮实体模型,在ansys geometry中提取流体域模型,在ansys mesh中对流体域进行网格划分和边界命名;此步骤能够建立包含齿轮主体特征的实体模型,以模拟齿轮的运动状态;
9.步骤二,将流体域网格导入fluent中,选择求解器类型;选择流场物理模型,添加流体材料,设置物性参数和流体域边界条件;此步骤为齿轮传动的流场环境进行了设定,以便得到高速齿轮周围的流场状态;
10.步骤三,定义齿轮运动边界、求解方法和离散格式;对流体域进行初始化,设置瞬态计算的时间步长和时间步,进行计算求解,计算完成后将结果导入cfd-post进行后处理;
此步骤对流场计算进行了设置,以便能够得到湍流流场的收敛结果,并将流场数据结果进行处理;
11.步骤四,计算齿轮受到的阻力矩和功率损失,获取齿面压力、流场速度分布;根据计算结果对流体域几何参数、网格划分参数及边界条件进行修正,重复步骤二-步骤三的计算步骤,直到得到挡板方位及间隙的最优参数组合;此步骤对流场仿真结果进行分析,并对仿真参数进行修正,以便获得不同结构参数下的风阻与流场结果,达到挡板结构参数优化的目的。
12.进一步,所述步骤一中,在ansys geometry中提取流体域模型中流体域模型不考虑轴、轴承及箱体上的各种附件、螺栓,以简化模型,在有挡板的流体域模型中,挡板为刚性壁面边界。
13.进一步,所述步骤一中,在ansys mesh中对流体域进行网格划分采用非结构四面体网格,对齿面进行细化,在间隙较小的流体域间也进行了网格细化,以保证小间隙区域部分至少有两层网格。
14.进一步,所述步骤二中,流场考虑重力的影响,在模型y方向上设置-9.81m/s2的重力加速度;流场物理模型中的湍流模型使用适用于强旋流的sst k-ω模型;
15.所述步骤二中,流体域边界条件包括齿面边界条件、箱体边界条件,齿面为刚性旋转壁面边界,箱体为刚性无滑移壁面,在忽略箱体作用的情况下,将其设置为开放界面;
16.齿面运动边界通过动网格模型进行定义,导入profile文件定义其转速,并设置网格光顺及网格重构参数。
17.进一步,所述步骤三中,求解方法选择压力-速度耦合算法,选择稳定性较强的simple算法,动量方程的离散方法为二阶迎风格式,压力的离散方法为“presto!”格式。
18.进一步,所述步骤四中,计算齿轮受到的阻力矩和功率损失,获取齿面压力、流场速度分布具体过程为:
19.对计算过程中齿轮受到的阻力矩和齿间流体的体积流量进行了监测;体积流量数据是通过在齿轮端面和齿顶添加平面,再分别对穿过几个平面的体积流量进行提取获得的。
20.进一步,所述步骤四中,根据计算结果对流体域几何参数、网格划分参数及边界条件进行修正,具体过程为:
21.通过多组参数对挡板与齿轮端面或齿顶的间隙进行调节,以获得不同挡板参数对风阻损失的影响规律,通过风阻功率损失计算和齿间体积流量的对比,确定最佳的挡板配置。
22.进一步,所述高速齿轮风阻与流场调控的仿真检测方法具体过程为:
23.根据应用中的试验齿轮,得到齿轮基本尺寸参数,在solidworks中建立齿轮实体模型,并输出*.igs文件;
24.将得到的*.igs文件导入ansys geometry中,提取流体域模型,流体域模型不考虑轴、轴承及箱体上的各种附件、螺栓,简化模型,在有挡板的流体域模型中,挡板为刚性壁面边界,并确定挡板与齿面之间的距离,输出*.agdb文件;
25.将得到的*.agdb文件导入ansys mesh中,对流体域进行网格划分,流体域模型采用非结构四面体网格进行网格划分,对齿面进行细化,在间隙较小的流体域间也进行了网
格细化,以保证小间隙部分至少有两层网格,网格划分后网格总数目在200万左右,节点数目在40万左右;对流体域边界进行命名,包括箱体壁面或挡板壁面、轮齿表面、齿轮端面,划分完成后导出*.msh文件;
26.将得到的*.msh流体域网格文件导入fluent中,选择求解器类型为压力求解器,考虑重力的影响,在模型y方向上设置-9.81m/s2的重力加速度;
27.选择流场物理模型,选用适用于高速齿轮流场的湍流流场计算模型,优选地,采用适用于强旋流的sst k-ω模型;
28.添加流体材料,设置物性参数,在空气流场中,设置流体材料为air,流体的密度设置为1.225kg/m3,流体的粘度设置为1.7894
×
10-5
kg/(m
·
s);
29.设置流体域边界条件,齿面边界条件、箱体边界条件,齿面为刚性旋转壁面边界,箱体为刚性无滑移壁面,在忽略箱体作用的情况下,将其设置为开放界面;将齿面旋转壁面定义为齿轮运动边界:齿面运动边界通过动网格模型进行定义,导入profile文件定义其转速,并设置网格光顺及网格重构参数;
30.定义压力-速度耦合求解算法和流场变量的离散格式:压力-速度耦合求解算法选择稳定性较强的simple算法,动量方程的离散方法为二阶迎风格式,压力的离散方法为“presto!”格式,湍动能离散格式为一阶迎风格式;对流体域进行初始化,选择standard initialization,设置流场速度、动量、压力参数的初始参数;
31.设置瞬态计算的时间步长设置为2e-6,时间步为5000步,进行计算求解;计算完成后将结果导入cfd-post进行后处理;通过在齿轮端面和齿顶添加平面,再分别对穿过几个平面的体积流量进行提取获得齿间流体的体积流量数据;通过提取的齿面阻力矩数据对风阻功率损失进行计算;
32.根据计算结果对流体域几何参数、网格划分参数及边界条件进行修正,通过多组参数对挡板与齿轮端面或齿顶的间隙进行了调节,以获得不同挡板参数对风阻损失的影响规律,通过风阻功率损失计算和齿间体积流量的对比,确定了最佳的挡板配置。
33.本发明的另一目的在于提供一种接收用户输入程序存储介质,所存储的计算机程序使电子设备执行所述高速齿轮风阻与流场调控的仿真检测方法包括下列步骤:
34.步骤一,在solidworks中建立齿轮实体模型,在ansys geometry中提取流体域模型,在ansys mesh中对流体域进行网格划分和边界命名;
35.步骤二,将流体域网格导入fluent中,选择求解器类型;选择流场物理模型,添加流体材料,设置物性参数和流体域边界条件;
36.步骤三,定义齿轮运动边界、求解方法和离散格式;对流体域进行初始化,设置瞬态计算的时间步长和时间步,进行计算求解,计算完成后将结果导入cfd-post进行后处理;
37.步骤四,计算齿轮受到的阻力矩和功率损失,获取齿面压力、流场速度分布;根据计算结果对流体域几何参数、网格划分参数及边界条件进行修正,重复步骤二-步骤三的计算步骤,直到得到挡板方位及间隙的最优参数组合。
38.本发明的另一目的在于提供一种计算机设备,所述计算机设备包括存储器和处理器,所述存储器存储有计算机程序,所述计算机程序被所述处理器执行时,使得所述处理器执行所述高速齿轮风阻与流场调控的仿真检测方法。
39.结合上述的所有技术方案,本发明所具备的优点及积极效果为:本发明为齿轮传
动技术领域中的风阻调控及挡板优化设计方法,是一种基于fluent的高速齿轮风阻与流场调控的仿真检测方法,可获得风阻损失计算结果以及挡板调控的影响规律和优化参数。风阻功率损失是高速齿轮传动的主要损失形式之一,试验方法难以准确提取风阻损失,且难以反映流场的状态,挡板对流场的调控作用机理不明。通过fluent软件模拟齿轮在高速转动下的风阻损失,能够获得齿轮周围的流场运动以及流场压力、流体速度等参数,并通过cfd-post对模拟结果进行分析,能够得到较为直观的结果。根据分析结果优化挡板结构、挡板间隙等参数,为高速齿轮传动系统的设计生产提供了优化指导,提高其传动效率,降低了通过经验调整挡板参数及设备尺寸造成的损失,为基于齿轮挡板进行流场调控的效率提升优化提供了一种便捷高效的方法。弥补了高速齿轮风阻机理及调控机制研究的不足,克服了依赖于经验设计风阻挡板的现状,提高了高速齿轮箱风阻挡板结构优化的设计效率和实施效果。
附图说明
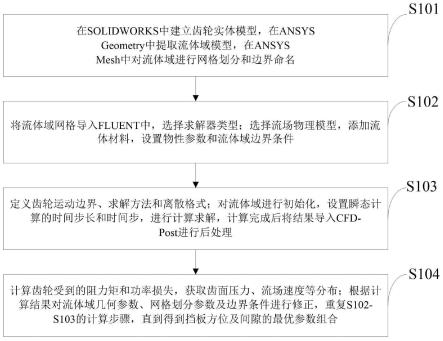
40.图1是本发明实施例提供的高速齿轮风阻与流场调控的仿真检测方法流程图。
41.图2是本发明实施例提供的高速齿轮风阻与流场调控的仿真检测过程示意图。
42.图3是本发明实施例提供的齿间流线图。
43.图4是本发明实施例提供的齿间速度云图。
44.图5是本发明实施例提供的齿间体积流量结果示意图。
45.图6是本发明实施例提供的不同速度下的风阻功率损失结果示意图。
46.图7是本发明实施例提供的不同挡板方向下的风阻功率损失结果示意图。
47.图8是本发明实施例提供的不同挡板间隙下的风阻功率损失结果示意图。
具体实施方式
48.为了使本发明的目的、技术方案及优点更加清楚明白,以下结合实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
49.针对现有技术存在的问题,本发明提供了一种高速齿轮风阻与流场调控的仿真检测方法、设备及介质,下面结合附图对本发明作详细的描述。
50.本发明提供的高速齿轮风阻与流场调控的仿真检测方法业内的普通技术人员还可以采用其他的步骤实施,图1的本发明提供的高速齿轮风阻与流场调控的仿真检测方法仅仅是一个具体实施例而已。
51.如图1所示,本发明实施例提供的高速齿轮风阻与流场调控的仿真检测方法包括:
52.s101:在solidworks中建立齿轮实体模型,在ansys geometry中提取流体域模型,在ansys mesh中对流体域进行网格划分和边界命名;
53.s102:将流体域网格导入fluent中,选择求解器类型;选择流场物理模型,添加流体材料,设置物性参数和流体域边界条件;
54.s103:定义齿轮运动边界、求解方法和离散格式;对流体域进行初始化,设置瞬态计算的时间步长和时间步,进行计算求解,计算完成后将结果导入cfd-post进行后处理;
55.s104:计算齿轮受到的阻力矩和功率损失,获取齿面压力、流场速度等分布;根据
计算结果对流体域几何参数、网格划分参数及边界条件进行修正,重复s102-s103的计算步骤,直到得到挡板方位及间隙的最优参数组合。
56.本发明实施例提供的s101中,在ansys geometry中提取流体域模型中流体域模型不考虑轴、轴承及箱体上的各种附件、螺栓等,简化了模型,在有挡板的流体域模型中,挡板为刚性壁面边界。
57.本发明实施例提供的s101中,在ansys mesh中对流体域进行网格划分采用非结构四面体网格,对齿面进行细化,在间隙较小的流体域间也进行了网格细化,以保证小间隙区域部分至少有两层网格。
58.本发明实施例提供的s102中,流场考虑重力的影响,在模型y方向上设置-9.81m/s2的重力加速度;
59.流场物理模型中的湍流模型使用适用于强旋流的sst k-ω模型。
60.本发明实施例提供的s102中,流体域边界条件包括齿面边界条件、箱体边界条件,齿面为刚性旋转壁面边界,箱体为刚性无滑移壁面,在忽略箱体作用的情况下,将其设置为开放界面;
61.齿面运动边界通过动网格模型进行定义,需导入profile文件定义其转速,并设置网格光顺及网格重构等参数。
62.本发明实施例提供的s103中,求解方法选择压力-速度耦合算法,选择稳定性较强的simple算法,动量方程的离散方法为二阶迎风格式,压力的离散方法为“presto!”格式。
63.本发明实施例提供的s104中,计算齿轮受到的阻力矩和功率损失,获取齿面压力、流场速度等分布具体过程为:
64.对计算过程中齿轮受到的阻力矩和齿间流体的体积流量进行了监测;体积流量数据是通过在齿轮端面和齿顶添加平面,再分别对穿过几个平面的体积流量进行提取获得的。
65.本发明实施例提供的s104中,根据计算结果对流体域几何参数、网格划分参数及边界条件进行修正,具体过程为:
66.通过多组参数对挡板与齿轮端面或齿顶的间隙进行调节,以获得不同挡板参数对风阻损失的影响规律,通过风阻功率损失计算和齿间体积流量的对比,确定了最佳的挡板配置。
67.如图2所示,本发明实施例提供的高速齿轮风阻与流场调控的仿真检测方法具体过程为:
68.根据应用中的试验齿轮,得到齿轮基本尺寸参数,在solidworks中建立齿轮实体模型,并输出*.igs文件;
69.将得到的*.igs文件导入ansys geometry中,提取流体域模型,流体域模型不考虑轴、轴承及箱体上的各种附件、螺栓等,简化了模型,在有挡板的流体域模型中,挡板为刚性壁面边界,并需要确定挡板与齿面之间的距离,输出*.agdb文件;
70.将得到的*.agdb文件导入ansys mesh中,对流体域进行网格划分,流体域模型采用非结构四面体网格进行网格划分,对齿面进行细化,在间隙较小的流体域间也进行了网格细化,保证小间隙部分至少有两层网格,网格划分后网格总数目在200万左右,节点数目在40万左右;对流体域边界进行命名,包括箱体壁面或挡板壁面、轮齿表面、齿轮端面,划分
完成后导出*.msh文件;
71.将得到的*.msh流体域网格文件导入fluent中,选择求解器类型为压力基求解器,考虑重力的影响,在模型y方向上设置-9.81m/s2的重力加速度;
72.选择流场物理模型,选用适用于高速齿轮流场的湍流流场计算模型,优选地,采用适用于强旋流的sst k-ω模型。
73.添加流体材料,设置物性参数,在空气流场中,设置流体材料为air,流体的密度设置为1.225kg/m3,流体的粘度设置为1.7894
×
10-5
kg/(m
·
s);
74.设置流体域边界条件,齿面边界条件、箱体边界条件,齿面为刚性旋转壁面边界,箱体为刚性无滑移壁面,在忽略箱体作用的情况下,将其设置为开放界面;将齿面旋转壁面定义为齿轮运动边界:齿面运动边界通过动网格模型进行定义,需导入profile文件定义其转速,并设置网格光顺及网格重构等参数;
75.定义压力-速度耦合求解算法和流场变量的离散格式:压力-速度耦合求解算法选择稳定性较强的simple算法,动量方程的离散方法为二阶迎风格式,压力的离散方法为“presto!”格式,湍动能离散格式为一阶迎风格式;对流体域进行初始化,选择standard initialization,设置流场速度、动量、压力等参数的初始参数;
76.设置瞬态计算的时间步长设置为2e-6,时间步为5000步,进行计算求解;计算完成后将结果导入cfd-post进行后处理;通过在齿轮端面和齿顶添加平面,再分别对穿过几个平面的体积流量进行提取获得齿间流体的体积流量数据;通过提取的齿面阻力矩数据对风阻功率损失进行计算;
77.根据计算结果对流体域几何参数、网格划分参数及边界条件进行修正,通过多组参数对挡板与齿轮端面或齿顶的间隙进行了调节,以获得不同挡板参数对风阻损失的影响规律,通过风阻功率损失计算和齿间体积流量的对比,确定了最佳的挡板配置。
78.下面结合仿真实验对本发明的技术效果作详细的描述。
79.本发明提供的高速齿轮风阻与流场调控的仿真检测具体过程为:
80.第一步,在solidworks中建立模数为4mm、分度圆直径为288mm、齿宽为20mm、压力角为20
°
的圆柱直齿轮实体模型,并输出保存为*.igs文件。
81.第二步,将第一步中得到的*.igs文件导入ansys geometry中,创建流体域,不考虑轴、轴承及箱体上的各种附件、螺栓等,其边界分别距离齿顶和齿轮端面30mm,通过布尔运算提取流体域,并输出保存为*.agdb文件。
82.第三步,将第二步中得到的*.agdb文件导入ansys mesh中,对流体域进行网格划分,采用非结构四面体网格进行网格划分,网格单元尺寸设置为5mm,激活——选项,保证小曲率半径处具有足够精度的网格;添加sizing模块,对象为齿轮端面和流体域边界面,分别设置网格单元尺寸为1mm和2mm,保证小间隙处流体域至少有两层网格;对流体域边界进行命名,包括箱体壁面或挡板壁面、轮齿表面、齿轮端面;网格划分后网格总数目在200万左右,节点数目在40万左右,将得到的网格输出保存为*.msh文件。
83.第四步,将第三步中得到的*.msh流体域网格文件导入fluent中并检查网格质量,确保没有负体积出现,选择求解器类型为压力基求解器,考虑重力的影响,在模型y方向上设置-9.81m/s2的重力加速度,时间类型选择为瞬态,速度方程为绝对速度。
84.第五步,选择流场物理模型,选用适用于高速齿轮流场的湍流流场计算模型,采用
适用于强旋流的sst k-ω模型。
85.第六步,添加流体材料,设置物性参数,在空气流场中,设置流体材料为air,流体的密度设置为1.225kg/m3,流体的粘度设置为1.7894
×
10-5
kg/(m
·
s)。
86.第七步,设置流体域边界条件,齿面为刚性旋转壁面边界,箱体为刚性无滑移壁面,在忽略箱体作用的情况下,将其设置为开放界面,流体根据边界内外的压力流入或流出。
87.第八步,将第七步中齿面旋转壁面定义为齿轮运动边界:齿面运动边界通过动网格模型进行定义,需导入profile文件定义其转速,并设置网格光顺及网格重构等参数;其中,光顺因子为0.1,重构最大单元畸变率为0.7,重构间隔为2,profile文件内容为:((gear transient 30)(time 012)(omega_z-419-419-419))。
88.第九步,定义压力-速度耦合求解算法和流场变量的离散格式;压力-速度耦合求解算法选择稳定性较强的simple算法,动量方程的离散方法为二阶迎风格式,压力的离散方法为“presto!”格式,湍动能离散格式为一阶迎风格式。
89.第十步,对流体域进行初始化,选择standard initialization,设置流场速度、湍动能、压力等参数的初始参数,均选择默认值。
90.第十一步,设置数据自动保存间隔为100步,设置瞬态计算的时间步长设置为2e-6,时间步为5000步,进行计算求解,将结果保存在*.cas、*.dat文件中。
91.第十二步,计算完成后将保存结果的*.cas、*.dat文件导入cfd-post进行后处理。
92.第十三步,如图3、图4所示,在齿间创建平面,分别提取流体流线和速度分布云图,可以看到齿间的流体速度最高,齿轮周围的速度接近齿轮线速度,流体多从齿轮两个端面流入,并从齿顶流出;如图5所示,为齿间三个方向体积流量的数据结果,通过在齿轮端面和齿顶添加辅助平面,提取通过平面上的流体体积流量为获得。
93.第十四步,根据计算结果对流体域几何参数、网格划分参数及边界条件进行修正,重复第四步-第十二步的计算步骤,直到结果达到收敛并稳定,图6显示了不同速度下,风阻功率损失的计算结果,并与理论公式的计算结果进行了对比,取得较吻合的结果。
94.通过多组参数的对比,得到了挡板参数减小风阻损失的结果;分别设置轴向和径向挡板,图7显示了不同挡板配置下对风阻功率损失的影响,对挡板与齿轮端面或齿顶的间隙进行了调节,以获得不同挡板参数对风阻损失的影响规律;图8为不同间隙下风阻功率损失曲线,通过对比可以发现,在仿真实验中所设定的范围内,间隙越小,风阻功率损失越小。以上过程是通过风阻功率损失计算和齿间体积流量的对比,确定了最佳的挡板配置,能够为基于挡板对风阻调控的高速齿轮传动设计提供指导。
95.应当注意,本发明的实施方式可以通过硬件、软件或者软件和硬件的结合来实现。硬件部分可以利用专用逻辑来实现;软件部分可以存储在存储器中,由适当的指令执行系统,例如微处理器或者专用设计硬件来执行。本领域的普通技术人员可以理解上述的设备和方法可以使用计算机可执行指令和/或包含在处理器控制代码中来实现,例如在诸如磁盘、cd或dvd-rom的载体介质、诸如只读存储器(固件)的可编程的存储器或者诸如光学或电子信号载体的数据载体上提供了这样的代码。本发明的设备及其模块可以由诸如超大规模集成电路或门阵列、诸如逻辑芯片、晶体管等的半导体、或者诸如现场可编程门阵列、可编程逻辑设备等的可编程硬件设备的硬件电路实现,也可以用由各种类型的处理器执行的软
件实现,也可以由上述硬件电路和软件的结合例如固件来实现。
96.以上所述,仅为本发明的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,都应涵盖在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
