1.本发明涉及一种驱动器智能停车的控制方法及系统。
背景技术:
2.在机器人控制领域,机器人的运行安全十分重要。尤其是一些重载机器人,关乎生命安全,在某些特殊情况下,机器人能够及时快速的停车运行显得尤为重要。
3.然而,现有技术中尚未有一种使机器人能够及时快速的停车运行的驱动器智能停车的控制方法或系统。
技术实现要素:
4.有鉴于此,有必要提供一种驱动器智能停车的控制方法及系统,其能够使机器人及时快速的停车运行。
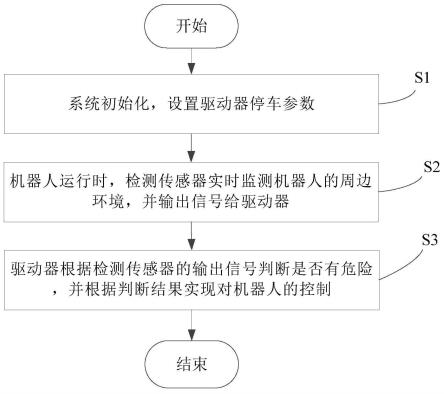
5.本发明一种驱动器智能停车的控制方法,该方法包括如下步骤:a.系统初始化,设置驱动器停车参数;b.机器人运行时,检测传感器实时监测机器人的周边环境,并输出信号给驱动器;c.驱动器根据检测传感器的输出信号判断是否有危险,并根据判断结果实现对机器人的控制。
6.进一步地,所述的停车参数包括目标速度和停车时间。
7.进一步地,所述的步骤c包括:
8.当周边环境无危险时,检测传感器输出安全信号给驱动器,驱动器判断周边环境正常,按照初始设定的参数对机器人进行控制。
9.进一步地,所述的步骤c还包括:
10.当周边环境有危险隐患时,检测传感器输出危险隐患信号给驱动器,驱动器计算危险隐患距离,根据危险隐患距离推算出危险情况的目标速度、停车时间,驱动器动态检测机器人当前实际速度,按照下列公式计算得到停车速度指令,进而计算得到控制指令,控制机器人停车:
11.停车速度指令=(当前实际速度-目标速度)/停车时间
12.本周期速度指令=上一周期速度指令-停车速度指令。
13.进一步地,所述的步骤c还包括:
14.当周边环境马上发生危险时,检测传感器监测到周边危险马上发生,检测传感器输出危险立即发生信号给驱动器,驱动器启动应急响应,将停车时间置零,控制机器人立即停车,同时切断母线供电,以保证机器人安全。
15.本发明提供还一种驱动器智能停车的控制系统,该系统包括设置模块、监测模块、控制模块,其中:所述设置模块用于在系统初始化时,设置驱动器停车参数;所述监测模块用于在机器人运行时,检测传感器实时监测机器人的周边环境,并输出信号给驱动器;所述控制模块用于使驱动器根据检测传感器的输出信号判断是否有危险,并根据判断结果实现对机器人的控制。
16.进一步地,所述的停车参数包括目标速度和停车时间。
17.进一步地,所述的控制模块具体用于:
18.当周边环境无危险时,检测传感器输出安全信号给驱动器,驱动器判断周边环境正常,按照初始设定的参数对机器人进行控制。
19.进一步地,所述的控制模块还具体用于:
20.当周边环境有危险隐患时,检测传感器输出危险隐患信号给驱动器,驱动器计算危险隐患距离,根据危险隐患距离推算出危险情况的目标速度、停车时间,驱动器动态检测机器人当前实际速度,按照下列公式计算得到停车速度指令,进而计算得到控制指令,控制机器人停车:
21.停车速度指令=(当前实际速度-目标速度)/停车时间
22.本周期速度指令=上一周期速度指令-停车速度指令。
23.进一步地,所述的控制模块还具体用于:
24.当周边环境马上发生危险时,检测传感器监测到周边危险马上发生,检测传感器输出危险立即发生信号给驱动器,驱动器启动应急响应,将停车时间置零,控制机器人立即停车,同时切断母线供电,以保证机器人安全。
25.本发明能够使机器人及时快速的停车运行,既保证了机器人正常运行时的停车,又保证了在遇到特殊情况时,机器人能够快速停车。
附图说明
26.图1为本发明驱动器智能停车的控制方法的流程图。
27.图2为本发明驱动器智能停车的控制系统的硬件架构图。
具体实施方式
28.下面结合附图及具体实施例对本发明作进一步详细的说明。
29.机器人上安装检测传感器,所述检测传感器用于监测机器人的周边环境。所述检测传感器输出信号给驱动器,所述驱动器动态监测检测传感器输出信号。
30.参阅图1所示,是本发明驱动器智能停车的控制方法较佳实施例的作业流程图。
31.步骤s1,系统初始化,设置驱动器停车参数。具体而言:
32.所述停车参数包括目标速度和停车时间。
33.其中,不同机器人对于停车要求不同,根据不同的应用场景调整目标速度和停车时间。
34.步骤s2,机器人运行时,检测传感器实时监测机器人的周边环境,并输出信号给驱动器。
35.步骤s3,驱动器根据检测传感器的输出信号判断是否有危险,并根据判断结果实现对机器人的控制。具体而言:
36.当周边环境无危险时,检测传感器输出安全信号给驱动器,驱动器判断周边环境正常,按照初始设定的参数对机器人进行控制。
37.当周边环境有危险隐患时,检测传感器输出危险隐患信号给驱动器,驱动器计算危险隐患距离,根据危险隐患距离推算出危险情况的目标速度、停车时间。驱动器动态检测
机器人当前实际速度,按照下列公式计算得到停车速度指令,进而计算得到控制指令,控制机器人停车:
38.停车速度指令=(当前实际速度-目标速度)/停车时间
39.本周期速度指令=上一周期速度指令-停车速度指令
40.当周边环境马上发生危险时,检测传感器监测到周边危险马上发生,检测传感器输出危险立即发生信号给驱动器,驱动器启动应急响应,将停车时间置零,控制机器人立即停车,同时切断母线供电,以保证机器人安全。
41.参阅图2所示,是本发明驱动器智能停车的控制系统10的硬件架构图。该系统包括:设置模块101、监测模块102、控制模块103。
42.所述设置模块101用于在系统初始化时,设置驱动器停车参数。具体而言:
43.所述停车参数包括目标速度和停车时间。
44.其中,不同机器人对于停车要求不同,根据不同的应用场景调整目标速度和停车时间。
45.所述监测模块102用于在机器人运行时,检测传感器实时监测机器人的周边环境,并输出信号给驱动器。
46.所述控制模块103用于使驱动器根据检测传感器的输出信号判断是否有危险,并根据判断结果实现对机器人的控制。具体而言:
47.当周边环境无危险时,检测传感器输出安全信号给驱动器,驱动器判断周边环境正常,按照初始设定的参数对机器人进行控制。
48.当周边环境有危险隐患时,检测传感器输出危险隐患信号给驱动器,驱动器计算危险隐患距离,根据危险隐患距离推算出危险情况的目标速度、停车时间。驱动器动态检测机器人当前实际速度,按照下列公式计算得到停车速度指令,进而计算得到控制指令,控制机器人停车:
49.停车速度指令=(当前实际速度-目标速度)/停车时间
50.本周期速度指令=上一周期速度指令-停车速度指令
51.当周边环境马上发生危险时,检测传感器监测到周边危险马上发生,检测传感器输出危险立即发生信号给驱动器,驱动器启动应急响应,将停车时间置零,控制机器人立即停车,同时切断母线供电,以保证机器人安全。
52.本发明能够实现驱动器的智能停车,既保证了机器人正常运行时的停车,又保证了机器人在危险情况下的智能停车。
53.虽然本发明参照当前的较佳实施方式进行了描述,但本领域的技术人员应能理解,上述较佳实施方式仅用来说明本发明,并非用来限定本发明的保护范围,任何在本发明的精神和原则范围之内,所做的任何修饰、等效替换、改进等,均应包含在本发明的权利保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
