技术特征:
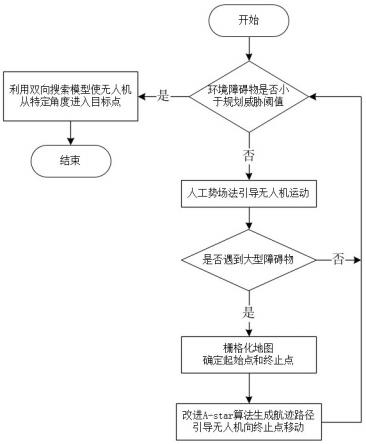
1.结合人工势场法与a-star算法角度约束的航迹规划方法,其特征在于,包括以下步骤:步骤1:根据地图建立航迹坐标系;步骤2:以无人机当前位置为起始点,以目标位置为终止点,获取起始点坐标、终止点坐标,判断地图中障碍物个数是否小于规划威胁阈值,若是,则采用双向搜索模型计算威胁规避角度,无人机沿威胁规避角度的航迹进入目标点,完成航迹规划,若否,则进入步骤3;步骤3:根据人工势场法建立引力场,无人机依据引力场向终止点移动,判断动作过程中是否存在影响距离超过阈值的障碍物,若是,则进入步骤4,若否,则返回步骤2;步骤4:对地图进行栅格化,确定起始点和终止点,采用改进a-star算法生成航迹路径,无人机沿航迹路径向终止点移动,无人机完成航迹路径后返回步骤2。2.根据权利要求1所述的结合人工势场法与a-star算法角度约束的航迹规划方法,其特征在于,所述步骤2中,采用双向搜索模型计算威胁规避角度时,具体包括有以下步骤:步骤201:对双向搜索模型进行参数初始化;步骤202:以起始点指向终止点为正方向,从起始点沿正方向搜索第一航点,搜索路程为第一航迹,同时从终止点沿逆方向搜索第二航点,搜索路程为第二航迹,判断第一航迹、第二航迹是否交汇,若是,则进入步骤203,若否,则重复搜索过程;步骤203:将两段航迹连成具有威胁规避角度的闭合航迹。3.根据权利要求2所述的结合人工势场法与a-star算法角度约束的航迹规划方法,其特征在于,所述步骤201中的双向搜索模型为:;为双向搜索模型函数;为改进后a-star算法的代价函数,为改进后的实际代价函数,为估算代价函数,、、为权重系数,;为角度偏差代价;;表示沿正方向搜索的当前节点与沿逆方向搜索的当前节点速度方向的夹角,表示沿正方向搜索的当前节点的速度方向与航迹坐标系x轴正半轴的夹角。4.根据权利要求3所述的结合人工势场法与a-star算法角度约束的航迹规划方法,其特征在于,所述人工势场法建立引力场的表达公式为:其中,为无人机所受引力场,为无人机当前坐标,为终止点坐标 ,为障碍物坐标,为引力系数,为障碍物的影响距离阈值。5.根据权利要求1所述的结合人工势场法与a-star算法角度约束的航迹规划方法,其特征在于,所述规划威胁阈值设为三个。6.根据权利要求1所述的结合人工势场法与a-star算法角度约束的航迹规划方法,其
特征在于,所述改进a-star算法的具体改进方式包括以下步骤;步骤401:引入障碍物扩展策略;步骤402:修改a-star算法中的实际代价函数,生成a-star算法的改进代价函数;步骤403:设定实际代价函数、估算代价函数的权重;步骤404:利用通视性检查方法删除a-star算法生成的航迹路径中的无用点。7.根据权利要求1-6任意一项所述的结合人工势场法与a-star算法角度约束的航迹规划方法,其特征在于,所述步骤402中,改进后的实际代价函数和改进后a-star算法的代价函数如下所示:改进后a-star算法的代价函数为:式中,为改进后的实际代价函数,为估算代价函数,、、为权重系数,;为角度偏差代价;为角度偏差代价;表示沿正方向搜索的当前节点与沿逆方向搜索的当前节点速度方向的夹角,表示沿正方向搜索的当前节点的速度方向与航迹坐标系x轴正半轴的夹角;地图栅格化后,设为无人机当前所在点的坐标,其中,改进后的实际代价函数可表示为:。8.根据权力要求7所述的结合人工势场法与a-star算法角度约束的航迹规划方法,其特征在于,所述步骤403中,设定权重后的代价函数如下所示:特征在于,所述步骤403中,设定权重后的代价函数如下所示:其中,为自变量,取值范围为。
技术总结
本发明公开了结合人工势场法与A-star算法角度约束的航迹规划方法,涉及航迹规划技术领域,该方法将人工势场法与改进A-star算法结合分别指导全局路径与局部路径:采用人工势场法进行全局路径规划,无人机的飞行方向由引力场控制,采用改进的A-star算法进行局部路径规划,避让大型障碍物,通过提高避障效果,缩短寻路时间来优化规划路径、提高规划效率,且利用双向搜索模型解决了端点进入角度的约束,更符合实际应用。合实际应用。合实际应用。
技术研发人员:韦雅媛 李辉 邓书超
受保护的技术使用者:四川大学
技术研发日:2022.05.10
技术公布日:2022/6/10
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。