1.本发明涉及无人机领域,尤其涉及适用于多旋翼无人机的多余度飞控系统及多旋翼无人机。
背景技术:
2.现阶段,无人机应用的场景越来越广泛,比如城市空中交通,电力巡检,航拍航测,物流快递,消防救援等。飞控系统对于多旋翼无人机来说,是至关重要的,飞控系统在无人机飞行过程中一旦失效,无人机的飞行任务将无法完成甚至导致坠机。现阶段,大多数飞控系统采用了一个飞控计算机多套传感器冗余的架构,缺少对飞控计算机的冗余。除此,目前的冗余飞控系统多数是监测传感器的健康状态,缺少对飞控系统最终输出pwm信号的监测,本发明提出一种新的方法,能够更加全面的对冗余飞控系统进行监测,从而提高飞行安全与稳定性。
技术实现要素:
3.针对于现有技术上的一些不足,本发明提出了适用于多旋翼无人机的多余度飞控系统及多旋翼无人机。
4.本发明的目的是通过采用以下技术方案来实现的:一种适用于多旋翼无人机的多余度飞控系统,所述的多余度飞控系统包括冗余裁决计算机、冗余切换计算机和多个飞控计算单元;所有飞控计算单元结构相同,均包括飞控计算机以及n个imu、n个磁罗盘、n个气压计、n个gps模块和一个数传电台,其中所述n个imu、n个磁罗盘、n个气压计、n个gps模块和一个数传电台都与所述飞控计算机相连,n为自然数且;数传电台接收远程地面站发送的位置指令、高度指令和航向指令,imu获取多旋翼无人机的加速度和角速度信息,磁罗盘获取多旋翼无人机的方向信息,气压计获取多旋翼无人机的高度信息,gps模块获取多旋翼无人机的位置和速度信息,所述加速度和角速度信息、方向信息、高度信息、位置和速度信息组成传感器数据;飞控计算机将传感器数据通过串口总线发送给冗余裁决计算机;飞控计算机根据传感器数据以及远程地面站发送的位置指令、高度指令和航向指令得到pwm信号,然后通过多路i/o接口发送给冗余切换计算机;冗余切换计算机采集飞控计算机多路pwm信号的数值并将所有pwm信号数值打包后通过串口总线发送给冗余裁决计算机,冗余裁决计算机通过多余度方法对所有的传感器数据和pwm数据进行解析比对裁决,得到最优飞控计算单元序号,再发送到冗余切换计算机;冗余切换计算机将最优计算单元飞控计算机的pwm信号输出到无人机的电机执行机构,从而控制无人机飞行。
5.进一步地,所述的imu包括加速度计和陀螺仪。
6.进一步地,所述的冗余切换计算机采集飞控计算机多路pwm信号的数值,具体方法为:飞控计算机通过多路i/o接口将多路pwm信号发送给冗余切换计算机,冗余切换计算机通过捕获的方式进行采集每路pwm信号的数值,当pwm信号上升沿到来时,冗余切换计算机定时器开始计时,当该pwm信号下降沿到来时停止计时,该时长为pwm信号高电平的时间,也
就是pwm信号的数值大小。
7.进一步地,所述飞控计算机根据传感器数据以及远程地面站发送的位置指令、高度指令和航向指令得到pwm信号具体包括以下步骤:(1)远程地面站将位置指令、高度指令以及航向指令通过数传发送到飞控计算机,所述的位置指令包括x方向位置指令和y方向位置指令;(2)飞控计算机将高度指令与无人机当前高度通过比例-积分-微分控制计算得到期望的无人机z方向速度;再将期望的无人机z方向速度与无人机当前z方向速度进行比例-积分-微分控制计算得到无人机高度控制量;(3)飞控计算机根据角速度、加速度以及磁罗盘的磁力值,通过互补滤波算法得到无人机的滚转角、俯仰角和航向角;(4)飞控计算机将航向指令与步骤(3)得到的航向角通过比例-积分-微分控制计算得到期望的无人机航向角速度;再将期望的无人机航向角速度与无人机当前的航向角速度进行比例-积分-微分控制计算得到无人机航向通道控制量;(5)飞控计算机将x方向位置指令与无人机当前x方向位置通过比例-积分-微分控制计算得到期望的无人机x方向速度;然后将期望的无人机x方向速度与无人机当前x方向速度进行比例-积分-微分控制计算得到期望的无人机俯仰姿态;将期望的无人机俯仰姿态与步骤(3)得到的俯仰角通过比例-积分-微分控制计算得到期望的无人机俯仰角速度,再将期望的无人机俯仰角速度与无人机当前的俯仰角速度进行比例-积分-微分控制计算得到无人机俯仰通道控制量;(6)飞控计算机将地面站y方向位置指令与无人机当前y方向位置通过比例-积分-微分控制计算得到期望的无人机y方向速度;然后将期望的无人机y方向速度与无人机当前y方向速度进行比例-积分-微分控制计算得到期望的无人机横滚姿态;将期望的无人机横滚姿态与步骤(3)得到的横滚角通过比例-积分-微分控制计算得到期望的无人机横滚角速度,再将期望的无人机横滚角速度与无人机当前横滚角速度进行比例-积分-微分控制计算得到无人机横滚通道控制量;(7)飞控计算机将无人机高度控制量、航向控制量、俯仰控制量以及横滚控制量进行控制分配,得出每个电机需要的控制量,从而得到每个电机需要输出的pwm信号数值。
8.进一步地,所述冗余裁决计算机通过多余度方法对所有的传感器数据和pwm数据进行解析比对裁决,得到最优飞控计算单元序号具体为:首先,冗余裁决计算机识别出传感器数据包的来源,将每个飞控计算单元对应顺序的传感器数据进行比对;根据比对结果进行表决来识别每个传感器的健康情况;所述的识别每个传感器的健康状态的过程包括:冗余裁决计算机若发现对应顺序的传感器数据比对结果一致,则确定该组各个传感器均处于健康状态;若其中一个传感器与其他传感器的数据不一致,则确定该传感器出现问题然后静默该传感器;通过上述方式,确定出每个飞控计算单元每个传感器的健康状态,再根据每个飞控计算单元拥有健康传感器的数量,确定飞控计算单元的健康程度;其次,冗余裁决计算机识别pwm信号数值数据包的来源,将每个飞控计算机对应通道的pwm信号数值进行比对,冗余裁决计算机若发现对应通道的pwm信号数值一致,则确定该组pwm信号数值正常;若其中一个pwm信号数值与其他pwm信号数值不一致,则确定该飞控
计算机pwm信号输出存在问题,则静默该飞控计算机等待检修;最后,在飞控计算机多路pwm信号输出正常的情况下,根据每个飞控计算单元拥有健康传感器数量多少,冗余裁决计算机选出最优飞控计算单元序号。
9.进一步地,每个飞控计算机采集自身所有传感器数据,将相同类型的传感器数据进行比对选出健康的传感器,进行飞行控制使用;所述的比对选出健康的传感器具体过程为:飞控计算机若发现相同类型传感器数据比对结果一致,则确定每个传感器处于健康状态;若其中一个传感器与其他传感器数据不一致,则确定该传感器非健康状态。
10.此外,本发明还提供一种多旋翼无人机,包括机身及所述的适用于多旋翼无人机的多余度飞控系统,其中,所述多余度飞控系统搭载于所述机身。
11.本发明的有益效果如下:本发明实现了飞控计算机冗余。当其中一个飞控计算机有故障时,冗余裁决计算机通过监测整个系统所有传感器信息和所有输出pwm信号信息,选择剩下飞控计算机中最优的再通过冗余切换计算机进行切换,使得本发明具有更强的容灾容错性能,也提高了无人机飞行的安全与可靠性。
12.本发明中,冗余裁决计算机不仅对每个飞控计算机的连接传感器进行监测比对,而且对每个飞控计算机控制计算输出的pwm信号数值进行了监测比对,当某个飞控计算机的输出pwm信号存在问题,冗余裁决计算机监测出来后,重新选择最优飞控计算机,然后冗余裁决计算机将最优飞控计算机序号发送到冗余切换计算机,实现最终的切换。对pwm信号输出的监测,更进一步保证整个无人机的安全可靠性。
13.本发明还实现了imu,磁罗盘,气压计以及gps多传感器的冗余。当其中一个传感器有问题时,飞控计算机会选择同类别其他健康的传感器进行使用。因此提高了整个系统的稳定与鲁棒性。
附图说明
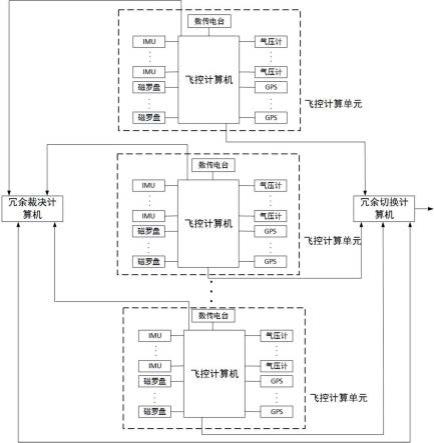
14.图1是本发明的原理框图。
具体实施方式
15.下面根据附图和具体实施例对本发明做进一步详细说明。
16.如图1所示实施例,本发明为适用于多旋翼无人机的多余度飞控系统,所述的多余度飞控系统包括冗余裁决计算机、冗余切换计算机和多个飞控计算单元;所有飞控计算单元结构相同,均包括飞控计算机以及n个imu、n个磁罗盘、n个气压计、n个gps模块和一个数传电台,其中所述n个imu、n个磁罗盘、n个气压计、n个gps模块和一个数传电台都与所述飞控计算机相连,n为自然数且;数传电台接收远程地面站发送的位置指令、高度指令和航向指令,imu获取多旋翼无人机的加速度和角速度信息,磁罗盘获取多旋翼无人机的磁场信息,气压计获取多旋翼无人机的高度信息,gps模块获取多旋翼无人机的位置和速度信息;所述加速度和角速度信息、磁场信息、高度信息、位置和速度信息组成传感器数据,飞控计算机将传感器数据通过串口总线发送给冗余裁决计算机;然后所有飞控计算机根据传感器数据以及远程地面站发送的位置指令、高度指令和航向指令得到pwm信号,然后通过多路i/o接口发送给冗余切换计算机;冗余切换计算机采集飞控计算机多路pwm信号的数值,将
所有pwm信号数值打包通过串口总线发送给冗余裁决计算机,冗余裁决计算机通过多余度方法对所有的传感器数据和pwm数据进行解析以及比对裁决,得到最优飞控计算单元序号后,再发送到冗余切换计算机,最后冗余切换计算机将最优计算单元飞控计算机的pwm信号输出到电机执行机构。所述的imu包括加速度计和陀螺仪。
17.所述飞控计算机根据传感器数据以及远程地面站发送的位置指令、高度指令和航向指令得到pwm信号具体包括以下步骤:(1)远程地面站将位置指令、高度指令以及航向指令通过数传发送到飞控计算机,所述的位置指令包括x方向位置指令和y方向位置指令;(2)飞控计算机将高度指令与无人机当前高度通过比例-积分-微分控制计算得到期望的无人机z方向速度。所述的比例-积分-微分控制计算公式为:其中,m(t)为比例-积分-微分控制计算的结果,e(t)为期望值与实际值的差,dt为每两次控制计算时间差,为比例系数,ki为积分系数,为微分系数;再将期望的无人机z方向速度与无人机当前z方向速度进行比例-积分-微分控制计算得到无人机高度控制量dh;(3)飞控计算机根据角速度、加速度以及磁罗盘的磁力值,通过互补滤波算法得到无人机滚转角、俯仰角和航向角,具体包括以下子步骤:(3.1)初始化四元数,将已知飞行器初始姿态角度带入下面公式中,求出初始时刻的四元数。其中为四元数q的实部,为四元数q的虚部,为滚转角,为俯仰角,为航向角;。
18.(3.2)获取角速度、加速度以及磁罗盘的磁力值,其中,加速度的测量值为,,,陀螺仪测量值为,,,磁力计测量值为,,。
19.(3.3)根据四元数得到机体系重力向量和磁场向量,利用以下公式:其中,,,为机体坐标系重力向量。
[0020]20.,其中,,,为地理坐标系磁力值,0,为地理坐标系磁场向量。,,为机体坐标系磁场向量。
[0021]
(3.4)计算误差:其中,,,为补偿误差。
[0022]
(3.5)利用误差修正陀螺仪数据:,其中,为比例系数,为积分系数。
[0023]
(3.6)利用修正的陀螺仪数值更新四元数:,其中,t为当前时刻,t为时间周期。
[0024]
(3.7)将更新后的四元数进行归一化:
ꢀ
。
[0025]
(3.8)将更新后的四元数转化成欧拉角,其中,为滚转角,为俯仰角,为航向角:。
[0026]
(4)飞控计算机将航向指令与步骤(3)得到的航向角通过比例-积分-微分控制计算得到期望的无人机航向角速度;再将期望的无人机航向角速度与无人机当前的航向角速度进行比例-积分-微分控制计算得到无人机航向通道控制量dr;(5)飞控计算机将x方向位置指令与无人机当前x方向位置通过比例-积分-微分控制计算得到期望的无人机x方向速度;然后将期望的无人机x方向速度与无人机当前x方向速度进行比例-积分-微分控制计算得到期望的无人机俯仰姿态;将期望的无人机俯仰姿态与步骤(3)得到的俯仰角通过比例-积分-微分控制计算得到期望的无人机俯仰角速度,再将期望的无人机俯仰角速度与无人机当前的俯仰角速度进行比例-积分-微分控制计算得到无人机俯仰通道控制量de;(6)飞控计算机将地面站y方向位置指令与无人机当前y方向位置通过比例-积分-微分控制计算得到期望的无人机y方向速度;然后将期望的无人机y方向速度与无人机当前y方向速度进行比例-积分-微分控制计算得到期望的无人机横滚姿态;将期望的无人机横滚姿态与步骤(3)得到的横滚角通过比例-积分-微分控制计算得到期望的无人机横滚角速度,再将期望的无人机横滚角速度与无人机当前横滚角速度进行比例-积分-微分控制计算得到无人机横滚通道控制量da;(7)飞控计算机将无人机高度控制量dh、航向控制量dr、俯仰控制量de以及横滚控制量da进行控制分配,得出每个电机需要的控制量control,根据公式:pwm=1000*control 1000,其中,pwm为飞控计算机计算出的每个电机需要输出的pwm信号数值。
[0027]
冗余切换计算机采集飞控计算机多路pwm信号的数值,具体方法为:飞控计算机通过多路i/o接口将多路pwm信号发送给冗余切换计算机,冗余切换计算机通过捕获的方式进行采集每路pwm信号的数值。当pwm信号上升沿到来时,冗余切换计算机定时器开始计时,当该pwm信号下降沿到来时停止计时,该时长为pwm信号高电平的时间,也就是pwm信号的数值大小。
[0028]
本发明中,每个飞控计算机也会采集所有传感器数据,将相同类型的传感器数据进行比对选出健康的传感器进行飞行控制使用。所述的比对选出健康的传感器具体过程:飞控计算机若发现相同类型传感器数据比对结果一致,则确定每个传感器处于健康状态;若其中一个传感器与其他传感器数据不一致,则确定该传感器非健康状态。
[0029]
基于上述,本发明实现了飞控计算机冗余。当其中一个飞控计算机有故障时,冗余
裁决计算机通过监测整个系统所有传感器信息和所有输出pwm信号,选择剩下飞控计算机中最优的再通过冗余切换计算机进行切换,使得本发明具有更强的容灾容错性能,也提高了无人机飞行的安全与可靠性。本发明还实现了imu,磁罗盘,气压计以及gps多传感器的冗余。当其中一个传感器有问题时,飞控计算机会选择同类别其他健康的传感器进行使用。因此提高了整个系统的稳定与鲁棒性。除此之外,冗余裁决计算机不仅对每个飞控计算机的连接传感器进行监测比对,而且对每个飞控计算机控制计算输出的pwm信号数值进行了监测比对,当某个飞控计算机的输出pwm信号存在问题,冗余裁决计算机监测出来后,重新选择最优飞控计算机,然后冗余裁决计算机将最优飞控计算机序号发送到冗余切换计算机,实现最终的切换。对pwm信号输出的监测,更进一步保证整个无人机的安全可靠性。
[0030]
此外,本发明还提供一种多旋翼无人机,包括机身及所述的适用于多旋翼无人机的多余度飞控系统,其中,所述多余度飞控系统搭载于所述机身。
[0031]
以上所述仅为发明的优选实例而已,然而并不用于限制发明。对于任何熟悉本领域的技术人员来说,在不脱离本发明技术方案的范围内,可以对上述的技术方案进行修改,或者对其中部分技术特征进行等同替换。凡是未脱离本发明技术内容,所做的修改、等同替换等均应包含在发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。