技术特征:
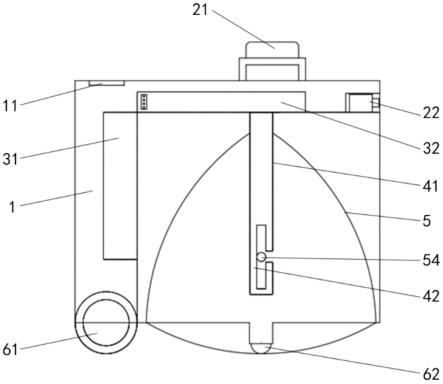
1.一种智能拾球车,其特征在于,包括移动车体(1)和拾取装置,所述移动车体(1)上设有视觉系统和驱动控制系统;所述视觉系统包括激光雷达(21)和图像采集系统,所述驱动控制系统包括信号处理芯片(31)、车轮驱动装置和供电机构,所述车轮驱动装置控制所述移动车体(1)进行移动,所述激光雷达(21)和图像采集系统均与所述信号处理芯片(31)信号连接,所述车轮驱动装置与所述信号处理芯片(31)控制连接,所述供电机构为所述视觉系统和驱动控制系统供电;所述拾取装置包括可开合式的转轴控制装置(4)和拾球滚筒(5),所述拾球滚筒(5)通过所述转轴控制装置(4)旋转固定在所述移动车体(1)上,所述拾球滚筒(5)随所述移动车体(1)的水平移动进行旋转移动。2.根据权利要求1所述的智能拾球车,其特征在于,所述驱动控制系统还包括显示控制面板(32),所述显示控制面板(32)与所述信号处理芯片(31)信号连接;所述激光雷达(21)置于所述移动车体(1)的顶端;所述图像采集系统包括摄像头(22),所述摄像头(22)置于所述移动车体(1)的前端。3.根据权利要求1所述的智能拾球车,其特征在于,所述车轮驱动装置包括动力轮(61)、辅助轮(62)和控制所述动力轮(61)运转的驱动系统,所述动力轮(61)和辅助轮(62)均设于所述移动车体(1)的底侧,一对所述动力轮(61)置于所述拾球滚筒(5)的尾端,一对所述辅助轮(62)置于所述拾球滚筒(5)的两侧,且所述动力轮(61)和辅助轮(62)均以所述拾球滚筒(5)的中轴线对称,且所述辅助轮(62)置于所述主轴(41)的下方。4.根据权利要求1所述的智能拾球车,其特征在于,所述拾球滚筒(5)的内部为中空的存储空间,所述拾球滚筒(5)的两侧分别为对称设置的第一滚筒轮(51)和第二滚筒轮(52),所述第一滚筒轮(51)和第二滚筒轮(52)之间设有沿边缘周向间隔设置的弹性卡件(53),所述第一滚筒轮(51)和第二滚筒轮(52)之间通过中心的支撑杆(54)连接固定,所述拾球滚筒(5)以所述支撑杆(54)为轴线旋转。5.根据权利要求4所述的智能拾球车,其特征在于,所述第一滚筒轮(51)和第二滚筒轮(52)均为支撑骨架,且所述支撑骨架呈莱罗三角形,所述支撑骨架的各端角处和各端边中段处分别设有连接所述第一滚筒轮(51)和第二滚筒轮(52)对应位置的连接杆(55),所述弹性卡件(53)均匀分布再相邻所述连接杆(55)之间。6.根据权利要求5所述的智能拾球车,其特征在于,所述支撑骨架中心设有线盘(91),所述线盘(91)外侧周向均匀设有六组伸缩变形杆件,相邻所述伸缩变形杆件的端部设有活动铰链(93),所述线盘(91)通过线盘控制电机(92)控制旋转,旋转的所述线盘(91)带动所述伸缩变形杆件进行伸缩活动,并带动所述活动铰链(93)移动,使所述支撑骨架外侧的边壁活动变形;所述伸缩变形杆件包括钢丝线(94)、套筒(95)、弹簧(96)和活动杆(97),所述钢丝线(94)的一端缠绕在所述线盘(91)上,另一端与所述活动杆(97)相连,所述活动杆(97)的一端置于所述套筒(95)内,另一端与所述连接杆(55)相接,所述活动杆(97)与所述套筒(95)之间设有所述弹簧(96);相邻所述钢丝线(94)与所述线盘(91)的缠绕方向互相反向。7.根据权利要求4或5所述的智能拾球车,其特征在于,所述存储空间内存储球体(8),所述弹性卡件(53)为弹性绳索,所述球体(8)的直径大于常态下相邻所述弹性卡件(53)之间的平行间距,且所述球体(8)的直径小于等于形变下相邻所述弹性卡件(53)之间的最大
间距。8.根据权利要求5所述的智能拾球车,其特征在于,所述转轴控制装置(4)包括主轴(41)、滚动轴承和夹持部(42),所述主轴(41)的顶端固定在移动车体(1)上,所述主轴(41)的底端设有所述夹持部(42);所述夹持部(42)的内侧为纵向设置的活动槽道(71),所述活动槽道(71)内的顶侧通过上弹簧(72)连接设有上夹持箍(73),底侧通过下弹簧(74)连接设有下夹持箍(75),且所述夹持部(42)的侧边设有一与所述活动槽道(71)通连的安装通口(76),所述支撑杆(54)的端部设有所述滚动轴承,所述上夹持箍(73)和下夹持箍(75)配合夹卡在所述滚动轴承上。9.根据权利要求8所述的智能拾球车,其特征在于,所述上夹持箍(73)具有开口向下的半圆环,所述下夹持箍(75)具有开口向上的半圆环,所述上夹持箍(73)和下夹持箍(75)的半圆环内均设有电磁铁,所述信号处理芯片(31)与所述电磁铁电连接。10.根据权利要求1所述的智能拾球车,其特征在于,还包括收容充电装置,所述收容充电装置包括充电接头、收容槽和置换槽,所述供电机构包括电池(11)和充电系统;所述移动车体(1)上设有磁吸式充电接口(12),磁吸式充电接口(12)通过所述充电系统与所述电池(11)电连接,所述磁吸式充电接口(12)与所述充电接头配合相接,所述收容槽用于存放由所述转轴控制装置(4)拆卸换下满载的所述拾球滚筒(5),所述置换槽用于存放便于所述转轴控制装置(4)夹持装上空置的所述拾球滚筒(5)。
技术总结
本发明提出一种智能拾球车,包括移动车体和拾取装置,移动车体上设有视觉系统和驱动控制系统;视觉系统包括激光雷达和图像采集系统,驱动控制系统包括信号处理芯片和车轮驱动装置,车轮驱动装置控制移动车体进行移动,激光雷达和图像采集系统均与信号处理芯片信号连接,车轮驱动装置与信号处理芯片控制连接;拾取装置包括可开合式的转轴控制装置和拾球滚筒,拾球滚筒通过转轴控制装置旋转固定在移动车体上,拾球滚筒随移动车体的水平移动进行旋转移动。在本申请中,可开合式的转轴控制装置,将拾取装置和移动车体组合成一个整体,通过转轴控制装置实现智能拾球车的自动装卸功能,提高智能拾球车的灵活性和功能性。提高智能拾球车的灵活性和功能性。提高智能拾球车的灵活性和功能性。
技术研发人员:杨海马 王原 张大伟 李筠 刘瑾 刘虎 丁毅凡
受保护的技术使用者:上海理工大学
技术研发日:2022.04.13
技术公布日:2022/6/10
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。