1.本发明涉及泵闸系统领域,具体是一种智慧型齿轮传动式泵闸系统。
背景技术:
2.传统的泵闸系统包括安装于闸口中的闸门、驱动闸门的液压油缸等。目前的泵闸占地面积大、智能化程度低,泵闸的闸门采用液压油缸推拉方式实现开闭,这样需要增设液压油站及液压油缸,占用空间大且系统不美观,液压油缸长期受河道中水的冲击力,影响液压缸的稳定。
技术实现要素:
3.本发明的目的是提供一种智慧型齿轮传动式泵闸系统,以解决现有技术泵闸使用液压油缸启闭占用空间大、工作不稳定及智能化程度低的的问题。
4.为了达到上述目的,本发明所采用的技术方案为:一种智慧型齿轮传动式泵闸系统,包括设于闸口中的闸门,所述闸门一侧边通过竖直转轴转动连接于闸口一侧侧壁,由此使闸门可转动打开或者截断闭合于闸口中,所述闸口对应于转轴所在一侧顶部设有驱动机构,由驱动机构与转轴连接驱动转轴及闸门转动;所述闸口另一侧侧壁顶部安装有锁定机构,锁定机构包括锁止箱,锁止箱内竖直滑动安装有锁止臂以及驱动锁止臂竖直动作的驱动器,所述锁止臂一端穿出锁止箱后再向下弯曲,且锁止臂下端设有导向块,所述闸门顶部对应于锁止臂方向一侧设有另一导向块,闸门闭合时由锁止臂运动至锁止臂下端导向块挤压接触闸门顶部导向块,且两个导向块彼此挤压接触的一面分别设为斜面;还包括设于闸口外的控制系统,以及设于闸口前、后方中至少一者的液位计,所述液位计与控制系统信号传递电连接,控制系统与所述驱动机构、驱动器控制电连接。
5.进一步的,所述驱动机构包括同轴固定于转轴上的从动齿轮,以及设于闸口对应于从动齿轮方向一侧的动力源、主动齿轮,主动齿轮同轴固定于动力源输出轴上,且主动齿轮与所述从动齿轮传动啮合;所述控制系统与驱动机构中的动力源控制电连接。
6.进一步的,所述锁止箱内的驱动器为旋转驱动器,锁止箱内设有竖直的导轨,所述锁止臂中间竖直滑动安装于导轨上,锁止箱内还设有曲柄连杆机构,所述旋转驱动器通过曲柄连杆机构与锁止臂连接,旋转驱动器转动时通过曲柄连杆机构带动锁止臂竖直动作;所述控制系统与旋转驱动器控制电连接。
7.进一步的,所述闸口内壁对应闸门闭合位置设有止动座,所述闸门闭合时压于止动座上,由止动座对闸门限位,止动座朝向闸门的一面安装有多个距离传感器,各个距离传感器分别与控制系统信号传递电连接。
8.进一步的,所述闸门朝向止动座的位置设有密封件,所述闸门压于止动座时压紧密封件形成密封。
9.进一步的,所述闸门上安装有潜水泵,所述控制系统与潜水泵控制电连接。
10.本发明在闸门转轴处安装啮合的齿轮(主动齿轮和从动齿轮),动力源通过控制齿轮的正反向运动来控制闸门的启闭。
11.本发明中配备锁定系统及距离传感器,距离传感器感测闸门关闭情况并产生相应信号至控制系统,控制系统可通过锁定机构自动控制闸门的锁定。
12.本发明控制系统连接有液位计,可以实时探测内外河的液位;动力源、潜水泵、锁定机构由控制系统根据实际设定工况自动控制。
13.本发明的优点是:1、本发明采用齿轮传动的方式开启闸门,占用空间小,相比液压油缸启闭的方式更美观。
14.2、本发明采用啮合的齿轮,传动精度高。
15.3、本发明齿轮传动的方式,避免了液压油缸长时间运行受冲击失稳,漏油的情况,可靠性高。
16.4、本发明由控制系统根据河道液位情况自动控制,无人值守,且具备远程传输功能,能在远程监控泵闸系统运行情况,自动化、智能化、数字化程度高。
17.5、本发明中带有特殊设计的锁定机构,锁止臂末端与闸门上设置相配合的导向块,可以保证闸门完全密封,是系统的密封可靠性大大提升。
附图说明
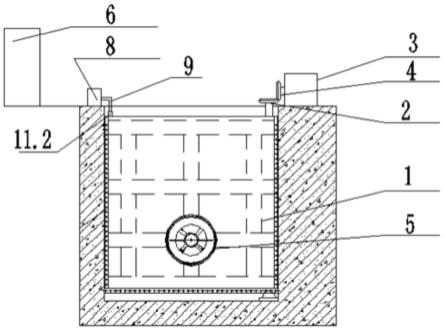
18.图1是本发明结构正视图。
19.图2是本发明结构俯视图。
20.图3是本发明锁定机构结构正向剖视图。
21.图4是本发明锁定机构导向块与闸门导向块配合原理侧视图。
具体实施方式
22.下面结合附图和实施例对本发明进一步说明。
23.如图1-图4所示,本发明包括安装于闸口中的闸门1,闸门1的右侧通过轴向竖直的转轴转动连接于闸口的右侧内壁,转轴上端从闸门1顶部穿出,并且转轴上端同轴固定有从动齿轮2。闸口右侧壁顶部设有驱动机构,驱动机构包括动力源3(如电机、旋转马达等)、主齿齿轮4,动力源3的输出轴水平向左,主动齿轮4同轴固定于动力源3的输出轴上,并且主动齿轮4与从动齿轮2相互啮合。由此动力源3提供动力使主动齿轮4转动时,可使从动齿轮2、转轴同步转动,进而使闸门1转动实现开闭。闸门1上还安装有潜水泵5。
24.闸口1左侧的地面上设有控制系统6,在闸口前、后方的区域还分别设有液位计7。控制系统6与动力源3、潜水泵5控制电连接,液位计7分别与控制系统6信号传递电连接,由液位计7采集对应区域液位信息并传送至控制系统6。
25.在闸口1的左侧壁顶部设有锁定机构,锁定机构包括固定于闸口左侧壁顶部的锁止箱8,锁止箱8内右下部位置设有竖直的导轨9,锁止箱8内还设有l型的锁止臂10,锁止臂10的l型水平段中间竖直滑动安装于导轨9上,锁止臂8的l型竖直段向右穿出锁止箱8并呈下垂状态,锁止臂8的l型竖直段末端固定有导向块11.1,导向块11.1的前侧面设为斜面。锁止箱8内还设有旋转驱动器12(由电机和同轴固定于电机输出轴的转盘构成),以及曲柄连
杆机构,曲柄连杆机构包括曲柄13、第一连杆14、第二连杆15,第一连杆14一端转动连接于锁止箱8内的支座上,第一连杆14另一端与第二连杆15一端转动连接,第二连杆15另一端转动连接于锁止臂8的l型水平段上,曲柄13一端偏心转动连接于旋转驱动器12的转动部(即转盘),曲柄13另一端转动连接于第一连杆14上。当旋转驱动器12的转动部转动时,通过曲柄连杆机构能够带动锁止臂10整体竖直升降。控制系统6与旋转驱动器12控制电连接。
26.当控制系统6通过探测液位判断闸门1需要打开时,控制动力源3开启后,主动齿轮4带动从动齿轮3运动,从而闸门1绕从动齿轮3中心轴向右后方转动开启,当闸门1开启到指定位置时,控制系统6控制动力源3停止提供动力给主动齿轮4。
27.当控制系统6通过探测液位判断闸门1需要关闭时,动力源3开启,控制主动齿轮4反向转动,从动齿轮3随主动齿轮4运动,闸门1绕从动齿轮3中心缓缓向左前方转动关闭,当到达预定位置后,控制动力源3停止,闸门1完全关闭,此时控制系统6控制锁定机构锁住闸门。
28.闸门1的顶部左侧设有另一导向块11.2,导向块11.2的后侧面设为斜面,闸门1背面的侧边位置设有密封件18,密封件18为橡胶材质,闸口内侧壁对应闸门1关闭时的后方位置设有止动座16,止动座16上设有多个距离传感器17,各个距离传感器17分别与控制系统6信号传递电连接。当控制系统6判断需要锁定闸门1时,控制锁定机构的锁止臂10沿导轨9往下运动,锁止臂10上的导向块11.1通过自身斜面与闸门1上的导向块11.2接触配合,由此锁止臂10上的导向块11.1可向前挤压闸门1上的导向块11.2,进而对闸门1产生向前的挤压作用,使闸门1背面的密封件18充分压缩于止动座16上形成密封,此时距离传感器14产生相应信号并传输给控制系统6,由控制系统6控制锁定机构停住。
29.当控制系统6通过探测液位需要抽水时,控制闸门1上的潜水泵5启动抽水,当液位达到预先设定的液位后,潜水泵5关闭。
30.整个过程均可由控制系统6自动控制,实现无人值守,控制系统6还可远程传送信息到管理人员移动设备上,管理人员可在远程操控整个系统的运行。
31.本发明所述的实施例仅仅是对本发明的优选实施方式进行的描述,并非对本发明构思和范围进行限定,在不脱离本发明设计思想的前提下,本领域中工程技术人员对本发明的技术方案作出的各种变型和改进,均应落入本发明的保护范围,本发明请求保护的技术内容,已经全部记载在权利要求书中。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
