1.本发明涉及水生物捕获技术领域,特别是螃蟹式捕螺装置及方法。
背景技术:
2.福寿螺原产于南美洲,在1981年引入我国后,由于天敌少,繁殖能力强,携带大量寄生虫而无法食用,对生态环境,尤其对农业生态造成了巨大破坏。对此,研发人员设计一种处理福寿螺的工具,例如公开号为cn214316722u的中国实用新型专利,公开了一种诱捕福寿螺的简易工具,包括:向下撑开的拱形网兜和包裹在网兜边缘的边框,网兜内均匀设有诱捕物;所述的网兜中间固定设有定位杆,定位杆穿过网兜的一端为尖端。但是该类诱捕装置的工作效率较低,且诱捕的效果并不理想。
技术实现要素:
3.本发明的目的在于,提供螃蟹式捕螺装置及方法。本发明能够有效捕获福寿螺,提高捕螺效率,大大提升了自动化程度。
4.本发明的技术方案:螃蟹式捕螺装置,包括托盘,托盘的下部设有行走装置,托盘上部设有中间机架,中间机架上设有顶盖,中间机架的前侧设有活动进料件,所述的托盘上且靠近活动进料件处设有粉碎机构,所述中间机架两侧分别设有左夹取臂和右夹持臂,左夹取臂的端部设有夹手连接件,夹手连接件上端设有手腕电机支撑架,手腕电机支撑架上设有手腕电机,手腕电机的转动端向下伸出且在端部设有第一联动齿轮,手腕电机支撑架上经轴设有第二联动齿轮,第一联动齿轮和第二联动齿轮相啮合,手腕电机支撑架的一侧设有夹手定位座,夹手定位座两侧经轴设有夹取手,第一联动齿轮上设有第一蛇形杆,第二联动齿轮上设有第二蛇形杆,第一蛇形杆和第二蛇形杆分别对应连接两侧的夹取手;所述右夹持臂的端部设有右臂固定座,右臂固定座上设有固定夹持电机,右臂固定座端部设有固定钳体,固定钳体上转动设有活动钳体,固定夹持电机的伸出端连接有摆动杆组件,摆动杆组件与活动钳体相连接。
5.上述的螃蟹式捕螺装置中,所述的行走装置包括设置托盘底部两侧的电机固定架,电机固定架上设有行走电机,行走电机的伸出端设有第一行走齿轮,托盘端部下侧设有l型连接块,l型连接块下端设有第一盖板,第一盖板一侧设有盖板连接齿轴,盖板连接齿轴一端设有第二盖板,盖板连接齿轴上的齿形部与第一行走齿轮相啮合,第一盖板与第二盖板之间设有多个曲柄轴,曲柄轴中间部设有第二行走齿轮,第二行走齿轮和盖板连接齿轴相啮合,曲柄轴两侧设有行走腿。
6.前述的螃蟹式捕螺装置中,所述行走腿包括设置在曲柄轴上的第一行走杆和第二行走杆,第一行走杆的端部两侧设有上三角片,上三角片的下端设有扭动杆,第二行走杆端部与扭动杆相连接,扭动杆下端部两侧设有下三角片,下三角片的底部设有滚轮,下三角片的底部且靠近滚轮的上端设有挡板。
7.前述的螃蟹式捕螺装置中,所述的活动进料件包括设置在中间机架前侧的开合电
机,开合电机的伸出端设有第一嘴部杆,第一嘴部杆上端铰接有第二嘴部杆,中间机架前侧转动设有入料盒,入料盒上设有角件,角件与第二嘴部杆相连接,入料盒一侧设有通槽,通槽对应粉碎机构。
8.前述的螃蟹式捕螺装置中,所述的中间机架侧部设有多个通风孔。
9.前述的螃蟹式捕螺装置中,所述的粉碎机构包括设置在托盘上的粉碎电机支座,粉碎电机支座上设有粉碎电机,粉碎电机的伸出端设有主动齿轮,中间机架的内侧设有粉碎盒,粉碎盒的底部设有落料口,粉碎盒内部两侧设有从动轴,从动轴上设有多个粉碎齿,从动轴的端部设有从动齿轮,两侧的从动齿轮相啮合,从动齿轮与主动齿轮相啮合,托盘上设有粉碎支撑架,从动轴一端架设在粉碎支撑架上。
10.前述的螃蟹式捕螺装置中,所述的左夹取臂包括设置中间机架内侧左臂电机,左臂电机的伸出端设有舵机连接架,舵机连接架上设有舵机,舵机的一端设有左臂主体,左臂主体内设有摆臂电机,摆臂电机的伸出端设有主动带轮,左臂主体的端部设有旋转体,旋转体的上端固定有从动带轮,主动带轮和从动带轮上绕有旋转皮带,旋转体内设有转动电机,所述的夹手连接件设置在转动电机的伸出端上。
11.实现所述的螃蟹式捕螺装置的方法,具体步骤包括:
12.s1:首先行走装置启动,行走电机输出动力,第一行走齿轮带动盖板连接齿轴转动,进而带动第二行走齿轮转动,曲柄轴转动,行走腿扭动,整个主体横向移动;
13.s2:定位秧苗,右夹持臂移动到秧苗根部处,固定夹持电机启动,活动钳体摆动,使得钳口打开,夹持住秧苗,紧接着左夹取臂工作,左夹取臂移动至活动钳体的上方,同时手腕电机启动,带动两侧的联动齿轮相啮合,实现夹取手合闭,左夹取臂水平向上移动,秧苗上的福寿螺捋进夹取手内;开合电机启动,通过嘴部杆向下拉开入料盒,将夹取手内福寿螺倒入入料盒中,开合电机向上推动入料盒,福寿螺被推入粉碎机构中;
14.s3:粉碎电机启动,通过齿轮的传动,使得粉碎齿转动,福寿螺在粉碎齿中被碾碎,碎末落在田野中。
15.与现有技术相比,本发明具有以下的优点:
16.1、在本发明中,行走装置工作,定位找到秧苗,右夹持臂运行,端部的钳子移动至秧苗的根部,固定夹持电机启动,经摆动杆组件带动活动钳体转动,夹住秧苗,左夹取臂运行,其端部的手腕电机转动,带动下端的两联动齿轮相啮合,夹取手合闭,左夹取臂向上水平移动,秧苗上的福寿螺被捋入夹取手中,捋除后,活动进料件打开,收集的螺倒入活动进料件中,再由活动进料件将螺送入粉碎机构中,粉碎机构将螺进行粉碎;通过部件的收集、粉碎,福寿螺被有效的处理,提高捕螺效率,大大提升了自动化程度。
17.2、所述的行走装置中,两侧行走电机同向转动,经齿轮传动,使得曲柄轴转动,行走腿扭动,主体横向移动,两侧行走电机转向相反时,整个行走装置会进行转动,变换方向。
18.3、所述的中间机架侧部设有多个通风孔,提升装置的通风性。
附图说明
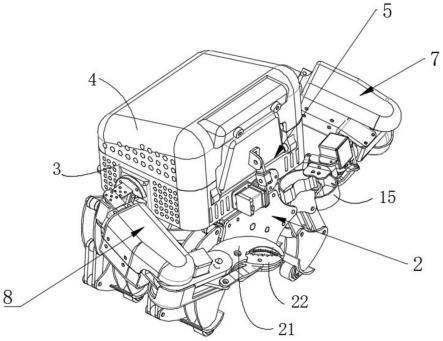
19.图1为本发明的结构示意图;
20.图2为行走装置的示意图;
21.图3为盖板连接齿轴的结构示意图;
22.图4为右夹持臂的示意图;
23.图5为左夹取臂的示意图;
24.图6为转动电机的示意图;
25.图7为第二蛇形杆的示意图;
26.图8为活动进料件的示意图;
27.图9为粉碎机构的示意图;
28.图10为落料口的示意图;
29.图11为通槽的示意图。
30.附图中的标记说明:1-托盘,2-行走装置,3-中间机架,301-通风孔,4-顶盖,5-活动进料件,6-粉碎机构,7-左夹取臂,8-右夹持臂,9-夹手连接件,10-手腕电机支撑架,11-手腕电机,12-第一联动齿轮,13-第二联动齿轮,14-夹手定位座,15-夹取手,151-夹取侧肢,152-半圆槽,153-半凹部,154-圆通槽,16-第一蛇形杆,17-第二蛇形杆,19-右臂固定座,20-固定夹持电机,21-固定钳体,22-活动钳体,23-摆动杆组件,201-电机固定架,202-行走电机,203-第一行走齿轮,204-l型连接块,205-第一盖板,206-盖板连接齿轴,207-第二盖板,208-曲柄轴,209-第二行走齿轮,210-行走腿,221-第一行走杆,222-第二行走杆,223-上三角片,224-扭动杆,225-下三角片,226-滚轮,227-挡板,501-开合电机,502-第一嘴部杆,503-第二嘴部杆,504-入料盒,505-角件,506-通槽,601-粉碎电机支座,602-粉碎电机,603-主动齿轮,604-粉碎盒,605-落料口,606-从动轴,607-粉碎齿,608-从动齿轮,609-粉碎支撑架,701-左臂电机,702-舵机连接架,703-舵机,704-左臂主体,705-摆臂电机,706-主动带轮,707-旋转体,708-从动带轮,709-旋转皮带,710-转动电机。
具体实施方式
31.下面结合附图和实施例对本发明作进一步说明,但不作为对本发明限制的依据。
32.实施例:螃蟹式捕螺装置,如图1所示,包括托盘1,托盘1的下部设有行走装置2,托盘1上部设有中间机架3,所述的中间机架3侧部设有多个通风孔301,提升装置的通风性,减少水流残留在装置上,中间机架3上设有顶盖4,顶盖上设有扫描摄像头,在移动的过程中能够自动识别前方的秧苗上是否有福寿螺卵存在,以及卵的具体位置坐标,通过控制程序对各个部件下达指令,中间机架3的前侧设有活动进料件5,所述的托盘1上且靠近活动进料件5处设有粉碎机构6,所述中间机架3两侧分别设有左夹取臂7和右夹持臂8,如图4所示,左夹取臂7的端部设有夹手连接件9,夹手连接件9上端设有手腕电机支撑架10,手腕电机支撑架10上设有手腕电机11,手腕电机11的转动端向下伸出且在端部设有第一联动齿轮12,手腕电机支撑架10上经轴设有第二联动齿轮13,如图6和7所示,第一联动齿轮12和第二联动齿轮13相啮合,手腕电机支撑架10的一侧设有夹手定位座14,夹手定位座14两侧经轴设有夹取手15,所述的夹取手15包括设置在两侧的夹取侧肢151,夹取侧肢151内设有半圆槽152,夹取侧肢151的内侧设有半凹部153,两侧的半凹部153合拢形成一个圆通槽154,夹取侧肢在合并后,秧苗在圆筒槽内,整个臂向上移动后,福寿螺被捋入半圆槽内;第一联动齿轮12上设有第一蛇形杆16,第二联动齿轮13上设有第二蛇形杆17,第一蛇形杆16和第二蛇形杆17分别对应连接两侧的夹取手15;所述右夹持臂8的端部设有右臂固定座19,右臂固定座19上设有固定夹持电机20,右臂固定座19端部设有固定钳体21,固定钳体21上转动设有活动
钳体22,固定夹持电机20的伸出端连接有摆动杆组件23,摆动杆组件23与活动钳体22相连接。
33.所述的行走装置2包括设置托盘1底部两侧的电机固定架201,电机固定架201上设有行走电机202,如图2和3所示,行走电机202的伸出端设有第一行走齿轮203,托盘1端部下侧设有l型连接块204,l型连接块204下端设有第一盖板205,第一盖板205一侧设有盖板连接齿轴206,盖板连接齿轴206一端设有第二盖板207,盖板连接齿轴206上的齿形部与第一行走齿轮203相啮合,第一盖板205与第二盖板207之间设有多个曲柄轴208,曲柄轴208中间部设有第二行走齿轮209,第二行走齿轮209和盖板连接齿轴206相啮合,曲柄轴208两侧设有行走腿210,行走腿共有四组,曲柄轴转动时,行走腿产生摆动,进而横向移动,两侧行走电机转向相反时,通过齿轮啮合与曲柄机构的带动,行走腿会向前运动,当两侧的行走电机转向相同时,会导致四对腿里左右两对运行方向相反,整个行走装置会进行转动,实现转弯和调头。所述行走腿210包括设置在曲柄轴208上的第一行走杆221和第二行走杆222,第一行走杆221的端部两侧设有上三角片223,上三角片223的下端设有扭动杆224,第二行走杆222端部与扭动杆224相连接,扭动杆224下端部两侧设有下三角片225,下三角片225的底部设有滚轮226,下三角片225的底部且靠近滚轮226的上端设有挡板227。该行走腿总体为一个四杆机构,在工作时产生摆动,实现横向移动,模拟螃蟹行走,相比于常规的螃蟹式移动方式,本发明的移动稳定性更好,底部采用滚轮同样是提高了移动的稳定性,减少整个主体的晃动。
34.所述的活动进料件5包括设置在中间机架3前侧的开合电机501,如图8所示,开合电机501的伸出端设有第一嘴部杆502,第一嘴部杆502上端铰接有第二嘴部杆503,中间机架3前侧转动设有入料盒504,入料盒504上设有角件505,角件505与第二嘴部杆503相连接,入料盒504一侧设有通槽506,通槽506对应粉碎机构6,如图11所示。开合电机启动,带动两根嘴部杆的联动,从而使得入料盒转动,左夹取臂收集的福寿螺倒入入料盒中,入料盒将福寿螺送入至粉碎机构中。
35.所述的粉碎机构6包括设置在托盘1上的粉碎电机支座601,如图9和10所示,粉碎电机支座601上设有粉碎电机602,粉碎电机602的伸出端设有主动齿轮603,中间机架3的内侧设有粉碎盒604,粉碎盒604的底部设有落料口605,粉碎盒604内部两侧设有从动轴606,从动轴606上设有多个粉碎齿607,从动轴606的端部设有从动齿轮608,两侧的从动齿轮608相啮合,从动齿轮608与主动齿轮603相啮合,托盘1上设有粉碎支撑架609,从动轴606一端架设在粉碎支撑架609上,粉碎电机经齿轮传动,使得粉碎齿转动,两侧粉碎齿错位设置,福寿螺被粉碎齿挤压破碎,碎末落在田野中。
36.所述的左夹取臂7包括设置中间机架3内侧左臂电机701,如图5所示,左臂电机701的伸出端设有舵机连接架702,舵机连接架702上设有舵机703,舵机703的一端设有左臂主体704,左臂主体704内设有摆臂电机705,摆臂电机705的伸出端设有主动带轮706,左臂主体704的端部设有旋转体707,旋转体707的上端固定有从动带轮708,主动带轮706和从动带轮708上绕有旋转皮带709,旋转体707内设有转动电机710,所述的手腕电机支撑架10设置在转动电机710的伸出端上,通过设置电机和舵机,实现左夹取臂的能够在多个方向移动,模拟螃蟹的多个关节转动,夹取手为盒体状,在夹取手在捋秧苗时,螺会落在夹取手内。
37.实现所述的螃蟹式捕螺装置的方法,具体步骤包括:s1:首先行走装置启动,行走
电机输出动力,第一行走齿轮带动盖板连接齿轴转动,进而带动第二行走齿轮转动,曲柄轴转动,行走腿扭动,整个主体横向移动;s2:定位秧苗,右夹持臂移动到秧苗根部处,固定夹持电机启动,活动钳体摆动,使得钳口打开,夹持住秧苗,紧接着左夹取臂工作,左夹取臂移动至活动钳体的上方,同时手腕电机启动,带动两侧的联动齿轮相啮合,实现夹取手合闭,左夹取臂水平向上移动,秧苗上的福寿螺捋进夹取手内;开合电机启动,通过嘴部杆向下拉开入料盒,将夹取手内福寿螺倒入入料盒中,开合电机向上推动入料盒,福寿螺被推入粉碎机构中;s3:粉碎电机启动,通过齿轮的传动,使得粉碎齿转动,福寿螺在粉碎齿中被碾碎,碎末落在田野中。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
