1.本技术属于水下地形获取技术领域,具体涉及一种水下地形的获取方法和系统。
背景技术:
2.坝体溃决是一种高危害的社会灾难,一旦坝体溃决其危害十分巨大,严重威胁了人类的生命财产安全。坝体溃决后,水流可携带泥沙运动,由于含水流的折射、反射、透明度问题,对水下溃口、河床地形实时、连续的获取是实验难点。因此,需要对坝体溃决后的河床地形进行科学、合理、准确地评估。
3.然而,现有的技术中,虽然现阶段,测深声纳、auv等技术可以获取水下地形,但是价格昂贵,并且难以应用于室内堰塞坝动水溃决实验。
4.因此,我们需要一种水下地形的获取方法,可以对坝体溃决后的河床地形进行实时、连续的获取。
技术实现要素:
5.本技术提出了一种水下地形的获取方法和系统,具有可以对水下地形进行实时、连续的获取且具有价格低廉、适用度高的优点。
6.为实现上述目的,本技术提供了如下方案:
7.一种水下地形的获取方法,包括如下步骤:
8.获取目标水域的水下地形的三维点云数据;
9.对所述三维点云数据进行数据预处理,并进行折射校正处理,得到真实点云数据;
10.基于所述真实点云数据,对所述目标水域的水下地形进行三维重建,得到水下地形三维模型;
11.基于所述水下地形三维模型,得到所述目标水域的水下地形数据。
12.可选的,使用kinect 2.0拍摄所述目标水域的水下地形图像,并将所述水下地形图像转换成所述三维点云数据。
13.可选的,所述三维点云数据是带有三维坐标值的数据。
14.可选的,所述数据预处理包括滤波降噪处理、数据简化处理和数据平滑处理。
15.可选的,利用折射定律的微分形式,得出关联折射角、入射角与实、虚像点坐标的函数,完成所述折射校正处理。
16.另一方面,为实现上述目的,本技术还提供了一种水下地形的获取系统,包括水下图像采集设备、点云数据模块、三维模型模块和输出模块;
17.所述图像采集设备用于获取目标水域的水下地形图像,并将所述水下地形图像转换为三维点云数据;
18.所述点云数据模块用于对所述三维点云数据进行数据预处理,并进行折射校正处理,得到真实点云数据;
19.所述三维模型模块用于基于所述真实点云数据,对所述目标水域的水下地形进行
三维重建,得到水下地形三维模型;
20.所述输出模块用于基于所述水下地形三维模型,得到所述目标水域的水下地形数据。
21.可选的,所述图像采集设备采用kinect 2.0;
22.所述三维点云数据是带有三维坐标值的数据。
23.可选的,所述点云数据模块包括预处理单元和校正单元;
24.所述预处理单元用于对所述三维点云数据进行数据预处理,所述数据预处理包括滤波降噪处理、数据简化处理和数据平滑处理;
25.所述校正单元用于对滤波后的所述三维点云数据进行折射校正处理。
26.本技术的有益效果为:
27.本技术公开了一种水下地形的获取方法和系统,提供点云数据进行三维重建,只管的获取水下地形数据,可以对坝体溃决后的河床地形进行实时、连续的获取,本技术技术方案实施简单,准确度、适用度高,具有广阔的推广空间和使用价值。
附图说明
28.为了更清楚地说明本技术的技术方案,下面对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅是本技术的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
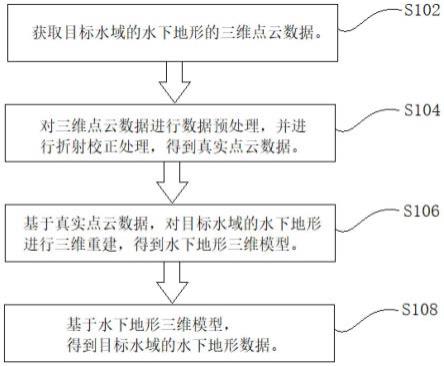
29.图1为本技术实施例一的水下地形的获取方法流程示意图;
30.图2为本技术实施例一的kinect 2.0传感原理示意图;
31.图3为本技术实施例一的pcd点云格式示意图;
32.图4为本技术实施例一的折射矫正处理的原理示意图;
33.图5为本技术实施例一的三维重建结果示意图;
34.图6为本技术实施例一的水槽溃坝实验模型结构示意图;
35.图7为本技术实施例一的采用kinect2.0获取的距离水槽末端4.6-5.75米的河床地形与实际地形对比结果图;
36.图8为本技术实施例二的水下地形的获取方系统结构示意图。
具体实施方式
37.下面将结合本技术实施例中的附图,对本技术实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本技术一部分实施例,而不是全部的实施例。基于本技术中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本技术保护的范围。
38.为使本技术的上述目的、特征和优点能够更加明显易懂,下面结合附图和具体实施方式对本技术作进一步详细的说明。
39.如图1所示,为本技术实施例一的水下地形的获取方法流程示意图,主要包括以下几个步骤:
40.s102.获取目标水域的水下地形的三维点云数据。
41.在本实施例中,采用使用kinect 2.0拍摄目标水域的水下地形图像,并将水下地
形图像转换成三维点云数据。
42.kinect 2.0拥有三颗摄像头,包括彩色摄像头、红外脉冲投射摄像头以及红外读取摄像头。kinect 2.0采用tof(time of flight)深度传感器来获取深度信息,传感原理如图2所示。这种传感方式指的是通过深度传感器发出调制的近红外脉冲,遇到物体反射后,深度传感器通过计算光线发射与接受反射的时间差或相位差,换算成被测物体到相机的距离,以此得到物体各部分的深度信息。配置方面,kinect 2.0帧率可达30fps,彩色摄像头能取得1920
×
1080的图像,并可获得512
×
424分辨率的深度图。检测范围方面,kinect 2.0的最佳检测范围介于0.5至4.5m之间。kinect 2.0设备能够同时捕获扫描的深度图和彩色rgb图,帧速率约为30fps,深度和颜色数据的融合构成了一个彩色点云,它的每一个帧包含大约30万点。深度传感器发出调制的近红外脉冲可穿透一定浊度的水流,故kinect 2.0具备获取水下地形的能力。
43.另一方面,本技术利用visual studio 2013编写程序开发出一套数据转换工具,将kinect 2.0拍摄的目标水域的水下地形图像,转换成三维点云数据,在本实施例中,三维点云数据是带有三维坐标值的数据。在本实施例中,三维点云数据保存为“.pcd”格式的文件,pcd格式如图3所示。本技术不限定具体的开发工具,可以用其他方式,只要是使用相应的深度相机就可以,也不限定使用visual studio2013编写,靠其他编程平台开发也是可行的,如参考论文《基于kinect v2三维重建的研究与实现》中的方式也是可行的。
44.s104.对三维点云数据进行数据预处理,并进行折射校正处理,得到真实点云数据。
45.在本实施例中,数据预处理包括对原始数据的滤波降噪处理、数据简化处理和数据平滑处理,消除由于物理结构和外界环境的影响出现的点云离群点和干扰点。数据预处理,即对点云数据的处理。可参考《基于混合滤波的点云数据降噪算法研究》、《一种点云混合简化算法》、《三维点云数据的精简与平滑处理算法》。
46.折射矫正处理的原理是:利用折射定律的微分形式,得出关联折射角、入射角与实、虚像点坐标的函数,达到减小由于水流对红外光的折射从而导致传感器测量的误差的目的。本实施例中的矫正原理如图4所示。具体参见论文《基于kinect v2三维重建的研究与实现》。
47.s106.基于真实点云数据,对目标水域的水下地形进行三维重建,得到水下地形三维模型。在本实施例中,三维重建采用kinect三维重建,可参考《基于kinect v2深度图像的三维重建技术研究》。
48.重建的水下地形三维模型如图5所示,分别表示20s、40s、60s时建立的三维模型。可通过amsterchem coco、chemsep、apache openoffice或adobe photoshop软件查看处理后的点云数据组建的水下地形三维模型。
49.s108.基于水下地形三维模型,得到目标水域的水下地形数据,实现对水下地形的实时获取。
50.为了验证本实施例获取的浑浊水下地形数据的准确性,本实施例搭建了如图6所示的水槽溃坝实验模型,采用粒径较小的砂-砾混合材料,可令溃决水流具备一定的浊度,此时肉眼无法观测浑浊水流下的地形。坝体破坏后,河床上的水流较坝体溃口处浑浊得多,令kinect2.0每隔12s扫描一次河床,通过三维点云数据转换、并且对数据进行折射校正后,
建立水下地形三维模型,再与实际地形进行比对。
51.(1)基本参数获取
52.先通过实地取样等方法获得水槽溃坝实验模型基本参数。水槽实验坝体最大坝高为0.3m,坝体宽度为0.3m,动床长6m,宽0.3m,厚0.05m。kinect 2.0距动床1.5m,距坝底3m。
53.(2)模拟结果如下:
54.对比结果如图7所示,可以看出,kinect 2.0仪器获取的地形数据与实际数据基本吻合,证明了kinect 2.0仪器穿透浑浊水流的能力,以及本实施例方法在获取水下地形在溃坝实验中的可行性。
55.实施例二
56.如图8所示,为本技术实施例二的水下地形获取系统结构示意图,主要包括水下图像采集设备、点云数据模块、三维模型模块和输出模块。
57.具体的,在本实施例中,图像采集设备用于获取目标水域的水下地形图像,并将水下地形图像转换为三维点云数据。在本实施例中,图像采集设备采用kinect 2.0。经转换后得到的三维点云数据是带有三维坐标值的数据。
58.点云数据模块用于对三维点云数据进行数据预处理,并进行折射校正处理,得到真实点云数据。在本实施例中,点云数据模块由预处理单元和校正单元组成。预处理单元用于对三维点云数据进行数据预处理,数据预处理包括滤波降噪处理、数据简化处理和数据平滑处理。校正单元用于对滤波后的三维点云数据进行折射校正处理。
59.三维模型模块用于基于真实点云数据,对目标水域的水下地形进行三维重建,得到水下地形三维模型。
60.输出模块用于基于水下地形三维模型,得到目标水域的水下地形数据,实现对水下地形的实时获取。
61.以上所述的实施例仅是对本技术优选方式进行的描述,并非对本技术的范围进行限定,在不脱离本技术设计精神的前提下,本领域普通技术人员对本技术的技术方案做出的各种变形和改进,均应落入本技术权利要求书确定的保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。