技术特征:
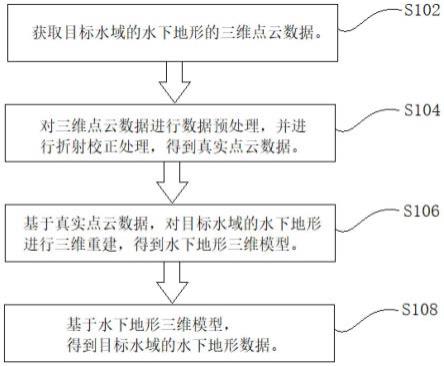
1.一种水下地形的获取方法,其特征在于,包括如下步骤:获取目标水域的水下地形的三维点云数据;对所述三维点云数据进行数据预处理,并进行折射校正处理,得到真实点云数据;基于所述真实点云数据,对所述目标水域的水下地形进行三维重建,得到水下地形三维模型;基于所述水下地形三维模型,得到所述目标水域的水下地形数据。2.根据权利要求1所述的水下地形的获取方法,其特征在于,使用kinect 2.0拍摄所述目标水域的水下地形图像,并将所述水下地形图像转换成所述三维点云数据。3.根据权利要求1所述的水下地形的获取方法,其特征在于,所述三维点云数据是带有三维坐标值的数据。4.根据权利要求3所述的水下地形的获取方法,其特征在于,所述数据预处理包括滤波降噪处理、数据简化处理和数据平滑处理。5.根据权利要求4所述的水下地形的获取方法,其特征在于,利用折射定律的微分形式,得出关联折射角、入射角与实、虚像点坐标的函数,完成所述折射校正处理。6.一种水下地形的获取系统,其特征在于,包括水下图像采集设备、点云数据模块、三维模型模块和输出模块;所述图像采集设备用于获取目标水域的水下地形图像,并将所述水下地形图像转换为三维点云数据;所述点云数据模块用于对所述三维点云数据进行数据预处理,并进行折射校正处理,得到真实点云数据;所述三维模型模块用于基于所述真实点云数据,对所述目标水域的水下地形进行三维重建,得到水下地形三维模型;所述输出模块用于基于所述水下地形三维模型,得到所述目标水域的水下地形数据。7.根据权利要求6所述的水下地形的获取系统,其特征在于,所述图像采集设备采用kinect 2.0;所述三维点云数据是带有三维坐标值的数据。8.根据权利要求7所述的水下地形的获取系统,其特征在于,所述点云数据模块包括预处理单元和校正单元;所述预处理单元用于对所述三维点云数据进行数据预处理,所述数据预处理包括滤波降噪处理、数据简化处理和数据平滑处理;所述校正单元用于对滤波后的所述三维点云数据进行折射校正处理。
技术总结
本申请公开一种水下地形的获取方法和系统,本方法包括:获取目标水域的水下地形的三维点云数据;对三维点云数据进行数据预处理和折射校正处理,得到真实点云数据;基于真实点云数据进行三维重建,得到水下地形三维模型;进而得到目标水域的水下地形数据。本系统包括水下图像采集设备、点云数据模块、三维模型模块和输出模块;图像采集设备获取目标水域的水下地形图像,并转换为三维点云数据;点云数据模块对三维点云数据进行数据预处理和折射校正处理,得到真实点云数据;三维模型模块进行三维重建,得到水下地形三维模型;输出模块基于水下地形三维模型,得到目标水域的水下地形数据。本申请可以对坝体溃决后的河床地形进行实时、连续的获取。连续的获取。连续的获取。
技术研发人员:蒋先刚 崔鹏 杜宏明 邓宏艳 张舒翔
受保护的技术使用者:中国科学院地理科学与资源研究所 西南交通大学
技术研发日:2022.03.10
技术公布日:2022/6/10
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。