1.本发明属于水文测验设备领域,涉及一种临时水深测量装置,特别涉及一种无需整平的便携式水深在线监测仪。
背景技术:
2.当前,水深测量的主要方法是在各固定地点安装各类水深测量仪器进行实时在线测量,当有临时性需要或在线仪器故障时采用人工方式进行补测。近年来,随着城市内涝、道路积水等现象多发频发,城市防洪重要性凸显,水深测量对象开始从水体向陆地拓展,水深测量应用场景大大增加。在现实中,很难保证每一处发生洪涝的地点,都已事先安装水深测量仪器。因此,常常需要应急人工开展水深测量或应急安装水深测量仪器,不仅费时费力,而且容易耽误汛情时机。目前的水深测量仪器在安装的时候需要进行整平,如果测杆存在倾斜,所测得的水深数据就会出现误差,在积水中安装水深测量仪器的整平难度大,整平后使用过程中也容易受到水中杂物的冲击导致变形,而且紧急安装人员在洪涝积水中长时间施工也存在一定的风险。水文部门缺乏一种具备高机动性的、能安装快捷或免安装的、结构简单不需要整平的、可实时在线监测的水深测量装置。
技术实现要素:
3.本发明的目的在于解决现有的水深测量仪器多为定点固定设置,需要整平,开展水深应急测验时需要人工测量或需要临时安装仪器设备费时又费力的问题,提供一种无需整平的便携式水深在线监测仪,能在测杆倾斜状态下精准实时测量水深,不需要对仪器进行整平和安装操作,不需要测量测杆倾斜的角度,具有高机动、免安装、可在线等特点。
4.本发明解决其技术问题所采用的技术方案是:一种无需整平的便携式水深在线监测仪,包括测杆、测杆上端设置有测距探头,所述测距探头设置四个,四个测距探头在测杆环周依次间隔90度均匀设置,各测距探头向外侧下方倾斜、且各测距探头相对测杆的俯角保持一致,各测距探头向上的延长线汇聚于测杆轴线上的同一个点。
5.本装置通过环周均匀设置的四个带俯角的测距探头,分别测得四个方向上测距探头距离水面的距离,从而得到测距探头延长线与测杆交点这一测杆理论顶点在四个俯角方向离水面的距离,结合已知的测杆理论长度、测距探头俯角角度对水深进行直接计算,无需考虑测杆的倾斜状态。本装置使用时无需整平、即放即用,能在测杆与水面不垂直的状态下精准实时测量水深,免去仪器整平操作,不需要测量测杆倾斜的角度,大大提升应急测验的机动性和时效性,为防汛救灾争取宝贵时间。
6.作为优选,各测距探头等高设置。
7.作为优选,各测距探头向上的延长线汇聚于测杆的上端点。
8.作为优选,所述测杆上部设有与测杆垂直的安装盘,所述四个测距探头分设在安装盘的环周。
9.作为优选,所述安装盘上表面为太阳能板。
10.作为优选,所述测杆上端的设有存储通讯模块、供电模块,所述供电模块为卡接、插接或旋接式可拆卸安装。
11.作为优选,所述测杆的底端设有底座。
12.作为优选,测距探头相对测杆的俯角记为θ,以测距探头延长线与测杆的交点为m点,m点作为测杆理论顶点,m点距离测杆底端长度为l,以四个测距探头测得m点俯角方向上与水面的距离,分别记为a、b、c、d,其中,测得a、b的两个测距探头间隔180度相对设置,测得c、d的两个测距探头间隔180度相对设置,可得水深h为:
[0013][0014]
本发明无需整平、即放即用,能在测杆与水面不垂直的状态下精准实时测量水深,免去仪器整平操作,不需要测量测杆倾斜的角度,大大提升应急测验的机动性和时效性,为防汛救灾争取宝贵时间。
附图说明
[0015]
下面结合附图对本发明做进一步说明。
[0016]
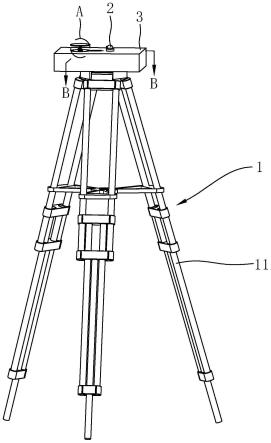
图1是本发明的一种结构示意图。
[0017]
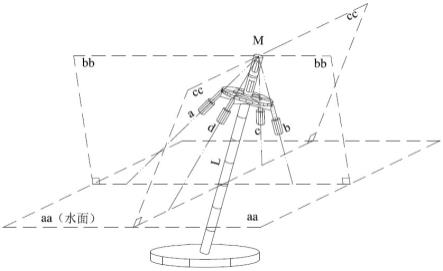
图2是本发明在倾斜状态下工作状态示意图。
[0018]
图3是本发明的图2状态的坐标系图。
[0019]
图4是本发明的图2状态bb面示意图。
[0020]
图5是本发明的图2状态cc面示意图。
[0021]
图中:1、测杆,2、测距探头,3、底座,4、存储通讯模块,5、供电模块,6、安装盘。
具体实施方式
[0022]
下面通过具体实施例并结合附图对本发明进一步说明。
[0023]
实施例:一种无需整平的便携式水深在线监测仪,如图1所示。本装置包括测杆1、测杆1上端环周均匀设置四个测距探头2,各测距探头等高设置。四个测距探头2在测杆环周依次间隔90度设置,各测距探头2向外侧下方倾斜、且各测距探头相对测杆1的俯角保持一致,各测距探头向上的延长线汇聚于测杆的上端点。
[0024]
所述测杆1上部设有与测杆垂直的圆形安装盘6,所述四个测距探头2分设在安装盘的环周。所述安装盘上表面为太阳能板。所述测杆2上端的设有存储通讯模块4、供电模块5,其中供电模块5为卡接、插接或旋接式可拆卸安装,便于更换电池。所述测杆的底端设有底座3。底座用于安装或者用于无安装时支撑。
[0025]
测距探头相对测杆的俯角记为θ,以测距探头延长线与测杆的交点为m点,本实施例中,m点即为测杆上端点,测杆长度为l。以四个测距探头测得m点俯角方向上与水面的距离,分别记为a、b、c、d,其中,测得a、b的两个测距探头间隔180度相对设置,测得c、d的两个测距探头间隔180度相对设置,可得水深h为:
[0026][0027]
具体计算分析过程如图2、3、4、5所示,平面aa为水平面,平面bb为一组相对设置的测距探头射线构成的平面,平面cc为另一组相对设置的测距探头射线构成的平面,平面bb、平面cc相交线为测杆的轴线。当测杆1倾斜时,测杆1上的测距探头2与测杆1一同倾斜,所以平面bb和平面cc夹角为直角,但平面bb和平面cc都不与平面aa垂直。已知,4个测距探头2与测杆1的夹角均为θ,测杆1长度为l。开始测量时,4个测距探头2测得杆顶m点与水面俯角方向上的距离,通过测距探头实测距离加上测距探头距杆顶m点的固定距离得出,平面bb中的两个测距探头测得的距离记为a、b,平面cc中的两个测距探头测得的距离记为c、d,其中a与b较长的取作a,c和d较长的取作c。以上水深算法不需要测量测杆倾斜的角度,即实现在测杆倾斜状态下也能完成水深测量。
[0028]
如图3所示,假设当测杆1倾斜时,测杆1与竖直方向的夹角为δ,测杆1的水上部分长度为l1,测杆1的水下部分长度为l2,测杆1的垂直高度为h,水深为h。测杆1在平面bb内与竖直方向的夹角为α,测杆1在平面cc内与竖直方向的夹角为β。
[0029]
如图4所示,在平面bb内单独分析,沿两个测距探头射线与水面的交点向测杆1做垂线,得到线段m和n,根据相似三角形原理:
[0030][0031]
根据三角函数公式:
[0032]
l1 n=a cosθ
………………………
(2)
[0033]
l
1-m=b cosθ
………………………
(3)
[0034]
i=b sinθ
…………………………
(4)
[0035]
由式(1)(2)(3)得:
[0036][0037]
将m代入下式得l1和l2:
[0038][0039][0040]
同理,在平面cc内可得,
[0041]
即可得到l2计算公式为:
[0042][0043]
在平面bb内,测杆与竖直方向的夹角为α,所以测杆的垂线与水平方向的夹角也为α,即
[0044]
[0045]
由式(4)(5)(10),得夹角α:
[0046][0047]
同理,如图5所示在平面cc内得测杆与竖直方向夹角β:
[0048][0049]
在图3中,过测杆上端点m的竖直方向线与测杆下端点所在水平面相交于c点。过c点作垂直于测杆的平面abcd,与测杆垂直相交于a点(即角mac等于90度),分别在平面bb内、平面cc内与过m点的竖直方向线相交与b点、d点,平面abcd与平面bb、平面cc均垂直。
[0050]
abcd为长方形:平面bb与平面cc垂直,因此角dab等于90度。线mb为平面bb内的竖直方向线,即线mb为线mc在平面bb内的投影,平面mbc与平面bb垂直,又有平面abcd与平面bb垂直,所以平面mbc与平面abcd的交线bc与平面bb垂直,得角abc等于90度,同理可证角adc等于90度,由此证明abcd为长方形。
[0051]
计算测杆1与竖直方向的夹角δ:
[0052]
ab=am
×
tanα
[0053]
ad=am
×
tanβ
[0054][0055][0056][0057]
根据相似三角形原理:h=l2×
cosδ
………………
(14)
[0058]
将式(9)(13)代入式(14),得
[0059][0060]
将式(11)(12)代入式(15),得水深h:
[0061][0062][0063]
式(16)即为水深计算公式,可以看出,公式不包含测杆1的倾斜角度δ、α或β,仅为4个测距探头测得杆顶与水面的距离a、b、c、d的函数,即可在不测量测杆倾斜角度的情况下完成水深测量。
[0064]
因为所以式(16)也可表述为:
[0065][0066]
通过式(17)可以对式(16)进行校验,如果两者差距偏大,则对监测仪进行检修。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。