一种基于阴影的交互式多模型下的视频sar多目标跟踪方法
技术领域
1.本发明属于视频sar多目标跟踪技术领域,具体涉及一种基于阴影的交互式多模型下的视频sar多目标跟踪方法。
背景技术:
2.视频sar能够以视频的形式对目标区域和图像进行连续观测,其成像帧率大于5hz,它在实时军事攻击和跟踪运动目标方面具有很大的优势,视频合成孔径雷达一经提出就成为研究热点。视频sar采用太赫兹频段,相同分辨率条件下对目标的成像时间较传统低波段sar大幅度缩短,具备了视频级侦察的能力,可连续不间断地对目标进行成像监视,并以视频流的形式输出。由于视频sar采用的太赫兹波段的低端部分,原则上仍属于毫米波波段,因此对云雾、烟尘仍具有较强的穿透性,不依赖日照光强和能见度因素,环境适应性较强。利用视频sar的成像结果,相邻帧图像中动目标连续变化,可有效检测运动目标并进行跟踪。视频sar的动目标检测与跟踪在军事上对于战场敌情侦测占领主动权具有重大的战略意义,具备巨大的研究价值和前景,广泛应用于陆地观测、军事侦察、灾害监测等诸多领域,有着巨大的发挥潜力。
3.视频sar概念一经提出,有关研究工作越来越受到关注,视频sar运动目标的检测跟踪成为视频sar成像技术的重要研究方向之一。但整体来说,研究仍然处于起步阶段。目标运动导致视频sar的成像结果偏离真实位置,但运动目标形成的阴影可以精确反应运动目标的实际位置,因此可基于目标阴影来对运动目标进行持续跟踪。
4.针对运动目标的持续跟踪,其关键在于目标运动模型的建立,但在实际场景中运动目标的机动情况复杂,很难用单一运动模型来描述,仅仅采用单模型自适应滤波器无法稳定、准确地跟踪高机动目标。对地面目标的运动特点进行分析,建立相应的运动模型,描述运动目标在雷达平台周围可能出现的运动状态,实现视频sar动目标阴影状态机动自适应跟踪,具有一定的实际研究应用前景。
技术实现要素:
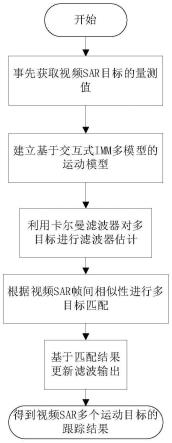
5.基于视频sar运动目标阴影检测结果,阴影可以表示运动目标的真实位置,从而获取多个目标的运动状态信息。本发明的目的,是针对视频sar成像结果中多目标的机动情况,建立多个运动模型,利用卡尔曼滤波器来预测下一帧运动目标的状态信息,根据相邻帧间运动目标的变化建立相似函数,来进行多目标之间的匹配,实现跟踪过程。本发明针对实际场景中运动目标机动情况的复杂性,其目标运动模型时刻机动变化,很难用单一运动模型来描述,仅仅采用单模型滤波器无法稳定、准确地跟踪高机动目标,将对机动目标的跟踪由单模型转换为多模型,本发明有效的利用了多模型跟踪来降低机动目标跟踪误差,具体的技术方案如图1所示。
6.具体步骤如下:
7.步骤1、获取视频sar目标的量测值。根据视频sar阴影检测结果,获取第k帧中多个
运动目标位置信息其中,m表示视频sar当前帧中运动目标数量,k表示帧数。
8.步骤2、建立基于交互式imm多模型的运动模型。视频sar实际场景中运动目标机动情况复杂性,其目标运动模型时刻机动变化。根据视频sar中运动目标的特点,描述运动目标在雷达平台周围可能出现的匀速状态、转弯状态等,建立匀速模型、左转弯、右转弯等多个运动模型来描述运动目标f
total
={f1,f2,
…fn
},其中,fn表示第n个运动模型的状态转移矩阵,n表示目标运动模型数量。
9.步骤3、利用卡尔曼滤波器对视频sar中的多个运动目标进行滤波估计。多模型通过交互作用来跟踪一个目标的机动运动,对该目标的n个运动模型分别建立n个卡尔曼滤波器,构成一个imm滤波器。并对第k帧中的m个运动目标建立m个imm滤波器同时对视频sar场景中的多个目标进行滤波估计。
10.(a)第m个运动目标在第k帧的状态向量可表示为其中x和y表示运动目标的位置,v
x
和vy表示在参考系下正交两个方向的分速度。目标的动态过程可表示为:
[0011][0012]
其中,fj是该目标的第j个运动模型的状态转移矩阵,是均值为0,协方差为qj的过程噪声。
[0013]
(b)假设n种运动模型按照一定的概率相互转换,从模型i转移到模型j的转移概率为p
ij
,通过先验条件来设定。是第k帧时imm滤波器的最终的目标m状态估计值,是模型j的状态估计值,uk是各个模型的概率分布情况。已知模型j在视频sar中第k-1帧的目标m状态估计值状态协方差p
j,mk-1|k-1
,以及从模型i转移到模型j的模型混合概率为通过交互作用获取卡尔曼滤波器的输入参数:模型j的目标m状态估计值状态协方差矩阵p
oj,mk-1|k-1
。
[0014][0015][0016]
(c)将和p
oj,mk-1|k-1
作为第k帧场景中运动目标m的第j个模型滤波器的输入参数,通过卡尔曼滤波进行预测,得到目标m第j个模型的状态预测值以及预测状态协方差
[0017]
步骤4、根据视频sar相邻帧间信息进行多目标匹配。假设第k-1帧中共有r个运动目标,第k帧中共有g个运动目标。获取第k帧中多个目标的量测值zk,依据帧间相似性原理构建相似函数d,建立相似度矩阵cost进行多目标之间的匹配。
[0018]
[0019]
步骤5、基于匹配结果获取视频sar运动目标跟踪结果。根据匹配结果校正卡尔曼滤波器的预测值,更新各模型的卡尔曼滤波输出。第k帧目标m的第j个模型滤波输出更新为将作为第k 1帧模型j的的滤波输入参数。最后,将目标m的各模型进行融合,得到总的状态估计
[0020][0021]
最终,第k帧中目标m的跟踪结果可表示为在视频sar成像区域可标记为点其中x和y表示运动目标的位置,υ
x
和vy表示在参考系下正交两个方向的分速度。
[0022]
本发明的有益效果为,相较于传统的基于视频sar的多目标跟踪技术,对机动目标的跟踪由单模型转换为多模型,利用多个滤波器同时进行跟踪,本发明有效地降低了跟踪误差,达到了更好的跟踪效果。
附图说明
[0023]
图1为本发明的流程框图;
[0024]
图2为实验基于本方法的仿真效果展示;其中,(a)为使用多模型和匀速cv单模型对单个运动目标跟踪与目标真实轨迹和观测样本进行效果对比的运动轨迹,图(b)是使用两种跟踪方法对单个运动目标进行跟踪后在x方向和y方向的位置误差,可以看出用本发明方法可以有效降低跟踪误差。
[0025]
图3为实验基于本方法的仿真效果展示;其中,(a)为使用多模型进行多个运动目标跟踪与目标真实轨迹和观测样本进行效果对比的运动轨迹,图(b)是使用该跟踪方法对多个运动目标进行跟踪后在x方向和y方向的位置误差结果。
[0026]
图4为本实验的数据集的部分展示,表示视频sar成像的原始图像,该数据集中存在7个运动目标。
[0027]
图5为实验基于本方法利用图4的数据集进行多模型跟踪的实测数据效果展示,其中7个运动目标的阴影用方框标出并进行标号,以区分不同的运动目标。
具体实施方式
[0028]
下面结合附图和仿真示例对本发明进行验证,以证明本发明的实用性。
[0029]
仿真环境::intel i5-9400f处理器,windows操作系统,matlab软件仿真;
[0030]
数据集:采用sandia national laboratories发布的视频sar成像视频数据,如附图4所示。
[0031]
采用本发明的方法在matlab进行仿真分析,对单个运动目标进行跟踪的仿真结果如附图2所示,对多个运动目标进行跟踪的仿真结果如图3所示,其中,对单个运动目标位置进行跟踪在不同帧的仿真精度如附图2(b)所示,利用多个运动目标进行跟踪在不同帧的仿真精度如附图3(b)、(c),其中x方向、y方向的误差ε
xk
、分别定义为:
[0032][0033]
[0034]
采用本发明的方法在matlab进行实测数据跟踪,其跟踪结果如附图5所示,可以看出本发明的视频sar多运动目标跟踪有着很好的效果。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。