1.本发明涉及一种天体共振轨道判断系统,尤其涉及一种基于计算机模拟的天体共振轨道系统,属于计算机模拟分析技术领域。
背景技术:
2.在天体力学中,轨道共振发生在两个天体的运行轨道的公转周期成简单整数比关系,它们之间互相受到周期性引力影响。这使它们的轨道在引力扰乱中保持稳定。假如三个或三个以上的天体的轨道以相互之间的共振率是整数的话,这样的共振被称为拉普拉斯共振。比如木星的卫星木卫三、木卫二和木卫一的轨道的共振率是1:2:4。
3.为了模拟天体力学中轨道共振,开发设计一种基于智能化仿真管理等功能的应用系统非常有必要。
技术实现要素:
4.本发明的技术目的在于设计了一种智能化仿真管理的天体共振轨道判断系统,通过该系统能够将系统运行的各个功能进行智能化处理,兼具轨道共振过程模拟,使整个系统更加智能且可视化。
5.为实现上述目的,本发明采用的技术方案为一种天体共振轨道判断系统,该系统包括上下位机通信模块、过程数值仿真位置模块及移动轨迹显示模块;上述的上下位机通信模块与过程数值仿真位置模块及移动轨迹显示模块连接;所述的上下位机通信模块对上位机计算出的控制信号下发到下位机,同时控制过程数值仿真移动参数上传到上位机。
6.进一步地,过程数值仿真位置及移动轨迹模块包含两种模式,分别为天体共振轨道过程数值仿真坐标系下位置显示与世界坐标系下过程数值仿真移动轨迹显示;所述的过程数值仿真位置及移动轨迹模块以图形的形式显示过程天体共振轨道数值仿真的位置及天体共振轨道移动轨迹。
7.进一步地,所述的下位机通信模块基于tcp/ip的无线通信方式来对上位机计算出的控制信号下发到下位机,控制过程的天体共振轨道数值仿真移动参数上传到上位机。
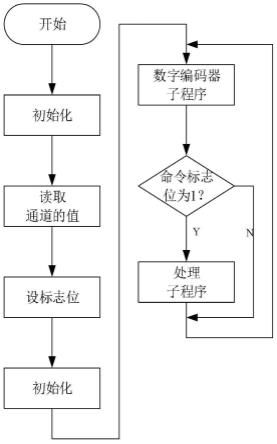
8.进一步地,当接通电源后,过程数值仿真位置模块及移动轨迹显示模块开始运行,首先完成dsp的初始化,接着点亮所有的led指示灯和数码管以实现指示灯和数码管的检测,然后调出通道0中的数据进行显示。扫描和键值的获取由hd7279来实现,当有键按下时hd7279的key管脚输出低电平,该管脚和tms320lf2407的cap2/qep2/iopa4连接,tms320lf2407会产生外部中断cap2int,经过初始化7279后,循环执行数字编码器子程序及检测中断标志如有中断则执行处理子程序,以实现输入、功能、与dsp交换数据并显示出来等各种功能。
9.进一步地,每当有按键按下,hd7279则会在key脚输出低电平,cap2/qep2/iopa4检测到7279的key引脚从状态“高”跳变到状态“低”来执行中断子程序。
10.进一步地,当进入处理,操作标志位就被锁定,在主程序中判断操作标志位后就会
调用处理子程序。进入子程序处理后,通过判断接收到的值,分别进入相应的模块处理即进入模块,则产生相应的动作反馈。
11.进一步地,通过循环查询数字编码子程序来判断数字编码期的左右旋,进而来调节设备电压、电流、速度和通道。
12.进一步地,程序中,把此3位数值作为通道值的十位,而通道的个位数值,按各个参数需要空间的大小作为电压、速度、指示灯、数码管的具体地址,可通过调用地址处理子程序实现。
13.与现有技术相比较,本发明是一款开发设计的能够实现智能化仿真管理等功能应用,系统操作容易界面简单;各个模块之间联系密切,又相互独立,能体现各自的特色,而且便于维护和增加新内容。
附图说明
14.图1是一种天体共振轨道判断系统结构图。
15.图2中断子程序图。
16.图3处理子程序图。
17.图4数字编码器子程序图。
18.图5运行结果图。(a)为运行流程图;(b)为运行图1;(c)为运行图2;(d)为运行图3。
具体实施方式
19.以下结合附图和实施例对本发明进行详细说明。
20.本发明采用的技术方案为一种天体共振轨道判断系统,该系统包括上下位机通信模块、过程数值仿真位置模块及移动轨迹显示模块;上述的上下位机通信模块与过程数值仿真位置模块及移动轨迹显示模块连接;所述的上下位机通信模块对上位机计算出的控制信号下发到下位机,同时控制过程数值仿真移动参数上传到上位机。
21.如图1-5所示,本发明设计的系统基于tcp/ip的无线通信方式来对上位机计算出的控制信号下发到下位机,控制过程数值仿真移动参数上传到上位机。
22.过程数值仿真位置及移动轨迹模块包含两种显示模式,分别为过程数值仿真坐标系下位置显示与世界坐标系下过程数值仿真移动轨迹显示;进入“过程数值仿真位置及移动轨迹”界面后,可以以图形的形式显示过程数值仿真的位置及移动轨迹.
23.当接通电源后,主程序就开始运行,首先完成dsp的初始化(软件初始化、i/o初始化)。接着点亮所有的led指示灯和数码管以实现指示灯和数码管的检测,然后调出通道0中的数据进行显示。的扫描和键值的获取由hd7279来实现,当有键按下时hd7279的key管脚输出低电平,该管脚和tms320lf2407的cap2/qep2/iopa4连接,tms320lf2407会产生外部中断cap2int,经过初始化7279后,循环执行数字编码器子程序及检测中断标志如有中断则执行处理子程序,以实现输入、功能、与dsp交换数据并显示出来等各种功能。
24.中断子程序设计:
25.中断程序为了实现输入而启用,每当有按键按下,hd7279则会在key脚输出低电平,cap2/qep2/iopa4检测到7279的key引脚从状态“高”跳变到状态“低”来执行中断子程序。在置标志位后,当主程序运行到循环检测各状态位时,即可运行处理程序。
26.当进入处理,操作标志位就被锁定,这样在主程序中判断操作标志位后就会调用处理子程序。进入子程序处理后,通过判断接收到的值,分别进入相应的模块处理即进入模块,则产生相应的动作。
27.子程序1:数字编码器子程序:
28.通过循环查询数字编码子程序来判断数字编码期的左右旋,进而来调节设备电压、电流、速度和通道。
29.子程序2:调用子程序:
30.程序中,把此3位数值作为通道值的十位,而通道的个位数值,按各个参数需要空间的大小作为电压、速度、指示灯、数码管的具体地址,可通过调用地址处理子程序实现。
技术特征:
1.一种天体共振轨道判断系统,其特征在于:该系统包括上下位机通信模块、过程数值仿真位置模块及移动轨迹显示模块;上述的上下位机通信模块与过程数值仿真位置模块及移动轨迹显示模块连接;所述的上下位机通信模块对上位机计算出的控制信号下发到下位机,同时控制过程数值仿真移动参数上传到上位机。2.根据权利要求1所述的一种天体共振轨道判断系统,其特征在于:过程数值仿真位置及移动轨迹模块包含两种模式,分别为天体共振轨道过程数值仿真坐标系下位置显示与世界坐标系下过程数值仿真移动轨迹显示;所述的过程数值仿真位置及移动轨迹模块以图形的形式显示过程天体共振轨道数值仿真的位置及天体共振轨道移动轨迹。3.根据权利要求1所述的一种天体共振轨道判断系统,其特征在于:所述的下位机通信模块基于tcp/ip的无线通信方式来对上位机计算出的控制信号下发到下位机,控制过程的天体共振轨道数值仿真移动参数上传到上位机。4.根据权利要求1所述的一种天体共振轨道判断系统,其特征在于:当接通电源后,过程数值仿真位置模块及移动轨迹显示模块开始运行,首先完成dsp的初始化,接着点亮所有的led指示灯和数码管以实现指示灯和数码管的检测,然后调出通道0中的数据进行显示;扫描和键值的获取由hd7279来实现,当有键按下时hd7279的key管脚输出低电平,该管脚和tms320lf2407的cap2/qep2/iopa4连接,tms320lf2407会产生外部中断cap2int,经过初始化7279后,循环执行数字编码器子程序及检测中断标志如有中断则执行处理子程序,以实现输入、功能、与dsp交换数据并显示出来各种功能。5.根据权利要求1所述的一种天体共振轨道判断系统,其特征在于:每当有按键按下,hd7279则会在key脚输出低电平,cap2/qep2/iopa4检测到7279的key引脚从状态“高”跳变到状态“低”来执行中断子程序。6.根据权利要求1所述的一种天体共振轨道判断系统,其特征在于:当进入处理,操作标志位就被锁定,在主程序中判断操作标志位后就会调用处理子程序;进入子程序处理后,通过判断接收到的值,分别进入相应的模块处理即进入模块,则产生相应的动作反馈。7.根据权利要求1所述的一种天体共振轨道判断系统,其特征在于:通过循环查询数字编码子程序来判断数字编码期的左右旋,进而来调节设备电压、电流、速度和通道。8.根据权利要求1所述的一种天体共振轨道判断系统,其特征在于:程序中,把3位数值作为通道值的十位,而通道的个位数值,按各个参数需要空间的大小作为电压、速度、指示灯、数码管的具体地址,可通过调用地址处理子程序实现。
技术总结
本发明公开了一种天体共振轨道判断系统,该系统包括上下位机通信模块、过程数值仿真位置模块及移动轨迹显示模块;上下位机通信模块与过程数值仿真位置模块及移动轨迹显示模块连接;上下位机通信模块对上位机计算出的控制信号下发到下位机,同时控制过程数值仿真移动参数上传到上位机。过程数值仿真位置及移动轨迹模块包含两种模式,分别为天体共振轨道过程数值仿真坐标系下位置显示与世界坐标系下过程数值仿真移动轨迹显示;所述的过程数值仿真位置及移动轨迹模块以图形的形式显示过程天体共振轨道数值仿真的位置及天体共振轨道移动轨迹。本发明能够实现智能化仿真管理等功能应用,系统操作容易界面简单;各个模块之间联系密切。系密切。系密切。
技术研发人员:张伟 周毅
受保护的技术使用者:北京工业大学
技术研发日:2022.03.17
技术公布日:2022/6/10
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。