1.本实用新型涉及机器人技术领域,具体地说是涉及一种机器人用双电机驱动轮组件及机器人移动平台。
背景技术:
2.机器人已广泛应用于生活及工业领域,方便了人们的生活,极大提高了生产效率。机器人移动平台上的行走机构一般包括轮式行走方式、履带式行走方式、支腿式行走方式及组合式行走方式等。在地面较平坦区域应用的机器人一般采用轮式行走方式,以降低机器人的生产制造成本,并且,轮式行走方式的行走速度较快、稳定性也较好。目前用于机器人的轮式行走机构,其结构较复杂,体积较庞大,占用机器人移动平台较大空间,不便于实现机器人的小型化设计。
技术实现要素:
3.本实用新型的目的在于提供一种机器人用双电机驱动轮组件,体积较紧凑,将其应用于机器人移动平台,占用机器人移动平台的空间较小。
4.为了达到上述目的,本实用新型所采用的技术解决方案如下:
5.一种机器人用双电机驱动轮组件,包括上支撑架、下支撑架、第一电机、第二电机、转向架和滚轮;
6.所述上支撑架位于所述下支撑架的上方,上支撑架与下支撑架之间连接有支撑杆;
7.所述上支撑架上设置第一电机和第二电机;
8.所述第一电机的输出转轴连接有第一驱动齿轮,所述第二电机的输出转轴连接有第二驱动齿轮;
9.所述转向架的下端转动连接所述滚轮,所述滚轮的轴线沿水平方向布置,所述滚轮上设置有第一锥齿轮,所述滚轮与所述第一锥齿轮同轴布置;
10.所述转向架的上端设置有转盘,所述转盘转动连接所述下支撑架,所述转盘的轴线沿竖直方向布置;
11.所述转盘上设置有第一被动齿轮;
12.所述第一被动齿轮上的中心位置转动连接第二被动齿轮,所述第一被动齿轮上的非中心位置转动连接第三被动齿轮,第二被动齿轮与第三被动齿轮啮合;
13.第三被动齿轮经过渡轴连接第二锥齿轮,第三被动齿轮、过渡轴及第二锥齿轮同轴布置;
14.所述第一驱动齿轮经第一传动机构连接所述第一被动齿轮,所述第二驱动齿轮经第二传动机构连接所述第二被动齿轮,所述第二锥齿轮与所述第一锥齿轮啮合。
15.优选的,第一驱动齿轮、第二驱动齿轮、第一被动齿轮、第二被动齿轮及第三被动齿轮位于上支撑架与下支撑架之间的空间内部。
16.优选的,所述第一传动机构包括第一传动轴、第一上传动齿轮和第一下传动齿轮,所述第一传动轴的两端分别转动连接上支撑架和下支撑架,第一传动轴的上端设置第一上传动齿轮,第一传动轴的下端设置第一下传动齿轮,第一传动轴、第一上传动齿轮及第一下传动齿轮同轴布置,所述第一驱动齿轮啮合连接第一上传动齿轮,所述第一下传动齿轮啮合连接所述第一被动齿轮。
17.优选的,所述第二传动机构包括第二传动轴和第二传动齿轮,第二传动轴的上端转动连接上支撑架,第二传动轴的下端固定连接第二被动齿轮,第二传动轴的上端设置第二传动齿轮,第二传动轴、第二传动齿轮及第二被动齿轮同轴布置,所述第二驱动齿轮啮合连接第二传动齿轮。
18.优选的,上支撑架或下支撑架上设置有装配插头。
19.优选的,所述滚轮的圆周侧设置有橡胶层。
20.优选的,第一电机和第二电机均设置为直流电机。
21.本实用新型还提供一种机器人移动平台,包括底盘,所述底盘上设置若干个上述的机器人用双电机驱动轮组件。
22.本实用新型的有益技术效果是:
23.本实用新型的机器人用双电机驱动轮组件,将其应用于机器人移动平台,可以实现机器人移动平台灵活地前进、后退及左右转向,驱动轮组件的体积较紧凑,占用机器人移动平台的空间较小,以留出较多空间装配其他机器人部件。
附图说明
24.图1为本实用新型实施例机器人用双电机驱动轮组件的主视图;
25.图2为本实用新型实施例机器人用双电机驱动轮组件的后视图;
26.图3为本实用新型实施例机器人用双电机驱动轮组件的左视图;
27.图4为本实用新型实施例机器人用双电机驱动轮组件的右视图;
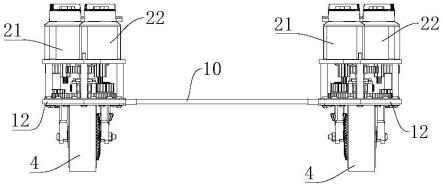
28.图5为本实用新型实施例机器人移动平台的主视图。
具体实施方式
29.为使本实用新型的目的、技术方案和有益效果更加清楚明白,以下结合具体实施例,并参照附图,对本实用新型进一步详细说明。本实用新型某些实施例于后方将参照所附附图做更全面性地描述,其中一些但并非全部的实施例将被示出。实际上,本实用新型的各种实施例可以许多不同形式实现,而不应被解释为限于此数所阐述的实施例;相对地,提供这些实施例使得本实用新型满足适用的法律要求。
30.在本实用新型的描述中,需要说明的是,术语“内”、“外”、“上”、“下”、“前”、“后”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性。
31.在本实用新型实施例中,提供一种机器人用双电机驱动轮组件,请参考图1至图5所示。
32.一种机器人用双电机驱动轮组件,包括上支撑架11、下支撑架12、第一电机21、第二电机22、转向架3和滚轮4等。
33.上支撑架11位于下支撑架12的上方,上支撑架11与下支撑架12之间经多根支撑杆13连接。
34.第一驱动齿轮51、第二驱动齿轮52、第一被动齿轮71、第二被动齿轮72及第三被动齿73轮位于上支撑架11与下支撑架12之间的空间内部,以使驱动轮组件体积较紧凑。
35.上支撑架11的上表面装配第一电机21和第二电机22,其中,第一电机21和第二电机22均设置为直流电机,第一电机21的输出转轴及第二电机22的输出转轴竖直向下布置。
36.第一电机21的输出转轴连接有第一驱动齿轮51,第二电机22的输出转轴连接有第二驱动齿轮52。
37.转向架3的下端转动连接滚轮4,滚轮4的轴线沿水平方向布置,滚轮4的一侧设置有第一锥齿轮61,滚轮4与第一锥齿轮61同轴布置。
38.转向架3的上端设置有转盘,转盘转动连接下支撑架12,转盘的轴线沿竖直方向布置。
39.转盘的上表面设置第一被动齿轮71。
40.第一被动齿轮71上表面的中心位置转动连接第二被动齿轮72,第一被动齿轮71与第二被动齿轮72同轴布置。第一被动齿轮71上的非中心位置转动连接第三被动齿轮73,第二被动齿轮72与第三被动齿轮73啮合。
41.第三被动齿轮73经过渡轴74连接第二锥齿轮62,第三被动齿轮73、过渡轴74及第二锥齿轮62同轴布置。
42.第一驱动齿轮51经第一传动机构连接第一被动齿轮71。
43.具体的,上述的第一传动机构包括第一传动轴81、第一上传动齿轮821和第一下传动齿轮822,第一传动轴81的两端分别经轴承转动连接上支撑架11和下支撑架12,第一传动轴81的上端设置第一上传动齿轮821,第一传动轴81的下端设置第一下传动齿轮822,第一传动轴81、第一上传动齿轮821及第一下传动齿轮822同轴布置。第一驱动齿轮51啮合连接第一上传动齿轮821,第一下传动齿轮822啮合连接第一被动齿轮71。如此,第一电机21的输出转轴转动带动第一驱动齿轮51转动,带动第一传动轴81、第一上传动齿轮821和第一下传动齿轮822三者同步转动,进而带动第一被动齿轮71转动。第一被动齿轮71转动带动转盘及转向架3转动,以实现转向架3的转向。其中,通过第一电机21正、反转带动转向架3朝左或朝右转向。
44.第二驱动齿轮52经第二传动机构连接第二被动齿轮72,第二锥齿轮62与第一锥齿轮61啮合。
45.具体的,上述的第二传动机构包括第二传动轴91和第二传动齿轮92,第二传动轴91的上端经轴承转动连接上支撑架11,第二传动轴91的下端固定连接第二被动齿轮72,第二传动轴91的上端设置第二传动齿轮92,第二传动轴91、第二传动齿轮92及第二被动齿轮72同轴布置,第二驱动齿轮52啮合连接第二传动齿轮92。如此,第二电机22的输出转轴转动带动第二驱动齿轮52转动,带动第二传动齿轮92、第二传动轴91及第二被动齿轮72三者同步转动,进而带动第三被动齿轮73、过渡轴74及第二锥齿轮62三者同步转动,最后带动第一锥齿轮61及滚轮4转动。其中,通过第二电机22正、反转带动滚轮4正向或反向转动,实现前
进或后退。
46.在上支撑架11或下支撑架12上设置有装配插头14,本实施例中在下支撑架12上设置装配插头14。通过装配插头14可拆卸连接机器人移动平台的底盘10。
47.滚轮4的圆周侧设置有橡胶层,以实现对滚轮4的减震缓冲。
48.本实用新型实施例还提供一种机器人移动平台,包括底盘10,底盘10的四个角的位置设置本实施例上述的机器人用双电机驱动轮组件。
49.至此,已经结合附图对本实施例进行了详细描述。依据以上描述,本领域技术人员应当对本实用新型机器人用双电机驱动轮组件有了清楚的认识。本实用新型的机器人用双电机驱动轮组件,将其应用于机器人移动平台,可以实现机器人移动平台灵活地前进、后退及左右转向,驱动轮组件的体积较紧凑,占用机器人移动平台的空间较小,以留出较多空间装配其他机器人部件。
50.以上所述的具体实施例,对本实用新型的目的、技术方案和有益效果进行了进一步详细说明,所应理解的是,以上所述仅为本实用新型的具体实施例而已,并不用于限制本实用新型,凡在本实用新型的精神和原则之内,所做的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
