1.本说明书涉及一种被用于元件装配机的支援的仓库系统。
背景技术:
2.对施加了印刷布线的基板实施对基板作业来批量生产基板产品的技术正在普及。进而,通常将实施对基板作业的多种对基板作业机排列设置,构成对基板作业线。对基板作业机中的元件装配机使用装填有收容多个元件的元件收容器的元件供给单元。在多数情况下,元件收容器以及元件供给单元被保管于仓库。然后,通过向元件供给单元装填元件收容器的装填作业来完成使用的准备。在专利文献1、2中公开了与元件收容器以及元件供给单元的保管以及使用准备相关的技术例。
3.在专利文献1中公开了控制smt生产线(对基板作业线)来制造印刷基板(基板产品)的制造管理系统。该制造管理系统具备带盘储料器、盒式储料器以及管理这两个储料器的控制个人计算机。控制个人计算机包括:数据库,存储与印刷基板的制造相关的各种数据文件;换产调整支援部,指示换产调整作业;以及装配数据生成部,生成用于将元件装配于印刷基板的装配数据。由此,即使是设备规格、结构不同的smt生产线,也能够高效地进行换产调整作业,另外,能够生成与换产调整信息相应的装配数据。
4.另外,专利文献2所公开的元件安装系统具备:元件保管库,保管收容有多个元件的多个供料器器具(元件供给单元的一个方式);补给装置,进行供料器器具相对于元件装配机的补给以及回收;以及搬运单元,在元件保管库与多个元件装配机之间搬运补给装置。由此,能够自动且高效地补给所需的元件,能够实现省人化以及自动化。
5.现有技术文献
6.专利文献
7.专利文献1:特开平10-34459号公报
8.专利文献2:国际公开第2014/010083号
技术实现要素:
9.发明所要解决的课题
10.然而,在专利文献1以及专利文献2中,实现了将保管于仓库(储料器、元件保管库)的元件收容器以及元件供给单元按照指示出库并供给的功能。然而,向元件供给单元装填元件收容器的装填作业由操作者实施。另外,使装填作业自动化的装置被实用化,但是元件收容器以及元件供给单元向装置的搬入由操作者实施。因此,并不能说达成了充分的省力化。
11.在本说明书中,要解决的课题在于提供一种仓库系统,将元件装配机的支援作为用途,在向元件供给单元装填元件收容器的装填作业中达成了比以往进一步的省力化。
12.用于解决课题的技术方案
13.本说明书公开一种仓库系统,具备:元件收容器仓库,保管多个元件收容器,所述
元件收容器收容多个元件;元件供给单元仓库,保管多个元件供给单元,所述元件供给单元在将收容于所述元件收容器的元件向元件装配机供给时使用;元件收容器装载机,向所述元件供给单元装填所述元件收容器;以及搬运机器人,在所述元件收容器仓库、所述元件供给单元仓库以及所述元件收容器装载机各自之间移动,将所述元件收容器以及所述元件供给单元向所述元件收容器装载机搬运。
14.发明效果
15.在本说明书所公开的仓库系统中,搬运机器人将保管于元件收容器仓库的元件收容器向元件收容器装载机搬运,并且将保管于元件供给单元仓库的元件供给单元向元件收容器装载机搬运。另外,元件收容器装载机向元件供给单元装填元件收容器。由此,自动地完成在元件装配机中使用元件供给单元的准备。因而,操作者不参与装填作业,与以往相比能够实现进一步的省力化。
附图说明
16.图1是示意性地表示第一实施方式的仓库系统的主视图。
17.图2是第一实施方式的仓库系统以及上位的生产管理系统的控制框图。
18.图3是说明第一实施方式的仓库系统的动作的动作流程的图。
19.图4是示意性地表示第二实施方式的仓库系统的主视图。
具体实施方式
20.1.第一实施方式的仓库系统1的结构
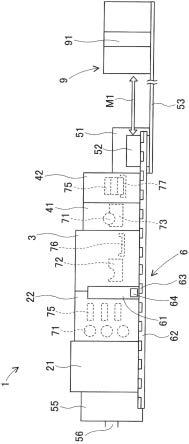
21.参照图1对第一实施方式的仓库系统1的结构进行说明。仓库系统1被用于对构成对基板作业线9的一台或者多台元件装配机91进行支援的用途。进而,仓库系统1能够将多个对基板作业线9的元件装配机91作为支援对象。元件装配机91使用装填有元件收容器的元件供给单元,实施向基板装配元件的装配作业。仓库系统1负责与元件收容器以及元件供给单元的保管和支援相关的作业。
22.元件收容器收容多个元件。元件供给单元在将收容于元件收容器的元件向元件装配机91供给时被使用。元件供给单元无需是一体型的,也可以构成为分离型。在本说明书中,将元件收容器和元件供给单元的至少一部分的组合、或者任一方称为“器具类”。
23.作为元件收容器能够示例带盘71,作为元件供给单元能够示例供料器装置(在图1中用虚线表示)。在带盘71上卷绕保持有以预定间距封入有多个元件的载带。供料器装置通过从带盘71拉出载带并向元件取出位置搬运而向元件装配机91的元件装配件供给元件。供料器装置大致分为一体型和分离型这两种。
24.一体型的供料器装置72(在图1中用虚线表示)以装填有带盘71的准备完毕供料器装置73的方式装备于元件装配机91。然后,当带盘71的元件被消耗完时,更换准备完毕供料器装置73整体。此外,也可能存在有仅更换带盘71的情况。另一方面,分离型的供料器装置由内置有载带的输送机构的供料器主体以及装填有带盘71的带盘盒构成。供料器主体常设于元件装配机91,单独带盘盒配置于供料器主体的附近。然后,当带盘71的元件被消耗完时,更换带盘盒。
25.如后所述,准备完毕供料器装置73由仓库系统1准备。同样地,装填有带盘71的准
备完毕带盘盒由仓库系统1准备。在图3中,图示了使用一体型的供料器装置72的情况,省略了分离型的供料器装置的图示。
26.另外,作为元件收容器能够示例托盘75,作为元件供给单元能够示例托盘装填单元76(在图1中用虚线表示)。托盘75具有分别收容元件的多个元件收容部。通常,多个元件收容部排列成二维格子状。托盘装填单元76以装填有托盘75的准备完毕托盘装填单元77的方式装备于元件装配机91。然后,当托盘75的元件被消耗完时,更换准备完毕托盘装填单元77整体。此外,也可能存在有仅更换托盘75的情况。如后所述,准备完毕托盘装填单元77由仓库系统1准备。另外,托盘装填单元76也可以具有将多个托盘75堆积而装填、并且将元件被消耗完的托盘75从上方依次拆下的机构。
27.第一实施方式的仓库系统1由多个仓库模块以及搬运机器人6等构成。如图1所示,排列设置有七个仓库模块。即,从左侧朝向右侧依次排列设置有搬入兼信息赋予部55、第一元件收容器仓库21、第二元件收容器仓库22、元件供给单元仓库3、带盘装载机41、托盘装载机42以及搬运车停止部51。
28.仓库模块各自在前侧具有用于与搬运机器人6交接器具类的交接口(省略图示)。仓库模块各自的交接口的配置以及形状被通用化。在图1中,仓库模块各自由大小不同的长方体表示,但是实际的形状也可以与长方体不同。另外,允许多个仓库模块不排成一列的配置以及多个仓库模块相互分离的配置。
29.搬运机器人6由机器人主体61以及移动路62等构成。移动路62以通过全部仓库模块的前侧的方式铺设。机器人主体61具有线性马达、行驶轮等移动机构,沿移动路62移动。因而,机器人主体61在仓库模块各自之间移动,其移动范围从左端的搬入兼信息赋予部55到达右端的搬运车停止部51。
30.此外,机器人主体61也可以设置多个。另外,移动路62可以是多线化或者环状化,也可以是具有更复杂的移动路径的结构。多个机器人主体61由后述的仓库控制部82(参照图2)控制,一边避免碰撞一边移动。
31.在移动路62的上表面附近,以恒定间隔设有非接触送电部63。另一方面,在机器人主体61的下部设有非接触受电部64。机器人主体61通过由非接触送电部63以及非接触受电部64构成的非接触供电部的结构而被供给电源。作为非接触供电部,能够示例使用线圈的电磁耦合方式的结构,并不限定于此。
32.机器人主体61具有把持器具类的臂(省略图示),在仓库模块的交接口进行器具类的交接动作。详细而言,机器人主体61在某个仓库模块的前侧使用臂把持载置于交接口的器具类。接着,机器人主体61通过移动至作为目标的其它仓库模块来搬运器具类。最后,机器人主体61在其它仓库模块的前侧释放臂而将器具类载置于交接口。此外,也可以是,仓库模块各自具有臂,机器人主体61仅具备搬运器具类的搬运功能。
33.搬入兼信息赋予部55是对元件收容器实施预定的作业的作业实施部的一个方式。并且,搬入兼信息赋予部55兼作为搬入元件收容器的搬入部。搬入兼信息赋予部55在左侧面具有元件收容器的搬入口56。搬入兼信息赋予部55使被搬入到搬入口56的元件收容器向内部的作业实施部(省略图示)移动。作业实施部实施对元件收容器赋予个体识别信息的信息赋予作业。
34.个体识别信息被赋予给上述带盘71、托盘75等元件收容器中的每一个。作为信息
赋予作业的作业内容,能够示例个体识别编号的打印、个体识别用条形码的粘贴。搬入兼信息赋予部55将赋予了个体识别信息的元件收容器载置于交接口,成为能够搬运的状态。由此,自动地实施朝向元件收容器的信息赋予作业以及搬出,实现省力化。
35.第一元件收容器仓库21是带干燥器的仓库,保管多个元件收容器。第一元件收容器仓库21将讨厌湿气的元件的元件收容器优先入库、保管、出库。作为讨厌湿气的元件,例如有ic元件、lsi元件,分别以带盘71、托盘75的方式被保管。此外,第一元件收容器仓库21在保管空间有富余的情况下,也可以保管无需优先的其它元件、供料器装置72、托盘装填单元76。
36.第二元件收容器仓库22是通用的仓库,对要保管的多个元件收容器没有特别的制约。第二元件收容器仓库22将带盘71、托盘75等元件收容器入库、保管、出库。这些元件收容器被搬运机器人6从搬入兼信息赋予部55搬运过来。
37.元件供给单元仓库3将一体型的供料器装置72、带盘盒、托盘装填单元76等多个元件供给单元入库、保管、出库。这些元件供给单元被操作者搬入到元件供给单元仓库3的交接口。或者,这些元件供给单元被搬运机器人6搬运过来。
38.第一元件收容器仓库21、第二元件收容器仓库22以及元件供给单元仓库3的内部结构相互类似。例如,这些仓库由保管架以及仓库内搬运部构成。保管架具有在宽度方向以及高度方向上二维地排列的多个保管位置,在各保管位置保管器具类。仓库内搬运部在保管位置与交接口之间搬运器具类。并不限定于此,这些仓库例如也可以在前后方向上设置多个保管架。
39.带盘装载机41以及托盘装载机42分别是向元件供给单元装填元件收容器的元件收容器装载机的一个方式。带盘装载机41实施将带盘71装填于供料器装置72或者带盘盒的装填作业。详细而言,带盘装载机41使由搬运机器人6载置于交接口的带盘71、供料器装置72或者带盘盒向内部的作业实施部(省略图示)移动。作业实施部将带盘71以预定的姿势装填于供料器装置72或者带盘盒的预定位置。由此,带盘71的装填作业结束,完成在元件装配机91中使用的准备。完成了准备的准备完毕供料器装置73或者准备完毕带盘盒被载置于交接口、或者暂时保管于内部。
40.此外,带盘装载机41也可以具备从准备完毕供料器装置73或者准备完毕带盘盒拆下带盘71的分离作业的功能。分离后的带盘71返回到第二元件收容器仓库22而被保管。另外,带盘71被拆下后的供料器装置72或者带盘盒返回到元件供给单元仓库3而被保管。
41.托盘装载机42实施向托盘装填单元76装填托盘75的装填作业。详细而言,托盘装载机42使由搬运机器人6载置于交接口的预定个数的托盘75以及托盘装填单元76向内部的作业实施部(省略图示)移动。作业实施部将托盘75以预定的姿势装填于托盘装填单元76的预定位置。由此,托盘75的装填作业结束,完成在元件装配机91中使用的准备。完成了准备的准备完毕托盘装填单元77(装填有托盘75的托盘装填单元76)被载置于交接口、或者暂时保管于内部。
42.此外,托盘装载机42也可以具备从准备完毕托盘装填单元77拆下托盘75的分离作业的功能。分离后的托盘75返回到第二元件收容器仓库22而被保管。另外,托盘75被拆下后的托盘装填单元76返回到元件供给单元仓库3而被保管。
43.在此,一直以来使用独立类型的信息赋予装置、带盘装填装置、托盘装填装置。然
而,在独立类型中,操作者需要进行器具类的搬入以及搬出。在第一实施方式中,通过具备搬运机器人6来减轻操作者的搬入搬出作业,因此与以往相比实现进一步的省力化。
44.搬运车停止部51使能够在仓库系统1与元件装配机91之间移动的搬运车52停止。搬运车停止部51实施将从搬运机器人6接收到的器具类装入到搬运车52的作业。搬运车52如图1中箭头m1所示,在连结仓库系统1和对基板作业线9的搬运路53上行驶,将所装入的器具类搬运至元件装配机91。因而,搬运车停止部51作为搬出元件收容器以及元件供给单元中的至少一方器具的搬出部发挥功能。
45.进而,搬运车52将在元件装配机91中使用完毕而没有当前的使用预定的闲置的器具类从元件装配机91向反方向搬运至搬运车停止部51。向反方向搬运的器具类通过搬运机器人6返回到任一个仓库或者任一个装载机。因而,搬运车停止部51作为搬入元件收容器以及元件供给单元中的至少一方器具的搬入部发挥功能。
46.此外,搬运车52能够设为多个。进而,在以多个对基板作业线9为支援对象的结构中,搬运路53也可以在中途分支或者被环状化,构成更复杂的搬运路径。多个搬运车52由后述的搬运控制部83(参照图2)控制,一边避免碰撞一边行驶。
47.2.仓库模块的通用要素
48.在此,七个仓库模块具有相互通用的通用要素。由此,容易进行仓库模块的增减变更以及配置变更。此外,通常“模块”是指具有通用要素且容易变更的结构单元。通用要素包含下述六个项目中的至少一个。
49.1)外形形状以及设置构造中的至少一方的通用化
50.2)电源规格以及电源部中的至少一方的通用化
51.3)通信规格以及通信部中的至少一方的通用化
52.4)控制仓库模块的动作的控制部的通用化
53.5)向仓库模块发出指令的上位控制部的通用化
54.6)仓库模块中的器具类的出入工序的通用化
55.以下,依次进行说明。
56.1)在第一实施方式中,除了搬运车停止部51以外的仓库模块的外形形状不同,但是设置构造被通用化。例如,在通用基座、地面上以恒定间距设有固定座。另一方面,在仓库模块各自的底面以相同的恒定间距设有通用形状的设置座。仓库模块的设置座使用相同的固定件、例如相同的粗细以及长度的螺栓固定于固定座。
57.由此,即使设置座的总个数不同,多种仓库模块也以相同的作法设置于相同的通用基座、地面。因而,仓库模块的设置作业简单。进而,追加设置仓库模块的增设作业、变更仓库模块的排列顺序、位置的移设作业与设置作业同样地简单。
58.2)多种仓库模块的电源规格被通用化。例如,以在电源中并用交流以及直流、或者在驱动电源和控制电源中使电压电平不同这样的方式使电源规格通用化。由此,能够从通用的电源部使用电源电缆向多个仓库模块进行电源供给。因而,无需在仓库模块各自设置电源部,能够实现构造的简化以及成本的低廉化。
59.3)多种仓库模块的通信规格以及通信部的结构被通用化。由此,能够将相同的通信部通用地应用于多个仓库模块,因此硬件成本低廉。另外,由于通信用软件也被通用化,因此软件的开发成本低廉。
60.假设因多种仓库模块的制造商不同、或者因制造时期的新旧而导致通信规格不统一的情况。在该情况下,为了实现仓库模块与仓库控制部82(后述)之间的通信以及仓库模块相互间的通信,另外需要接口装置。由此,产生成本上升、通信可靠性降低等弊端。
61.4)控制仓库模块的动作的控制部被通用化。例如,决定三个仓库内的保管位置的算法、控制仓库内搬运部的逻辑被通用化。由此,能够高效地使用三个仓库。另外,例如,在各仓库模块的交接口对器具类进行处理的处理条件被通用化。由此,与仓库模块的个别功能的不同无关,交接动作被通用化。因而,在各仓库模块中能够得到与器具类的交接相关的同等的动作可靠性,并且软件的开发成本低廉。
62.5)作为向仓库模块发出指令的上位控制部,通用地设有仓库控制部82。由此,仓库模块相互间的器具类的交接被统一管理。因而,能够及时且高效地实施器具类的交接动作、作业实施部中的作业。
63.6)各仓库模块中的器具类的出入工序、即交接口的配置以及形状被通用化。由此,由搬运机器人6进行的器具类的交接动作被简单化以及顺畅化,动作可靠性提高。
64.3.仓库系统1以及生产管理系统8的功能结构
65.接着,参照图2对第一实施方式的仓库系统1的功能结构以及上位的生产管理系统8的功能结构进行说明。如图2所示,生产管理系统8由生产管理部81、仓库控制部82、搬运控制部83以及生产线控制部84构成。生产管理部81位于控制的上位。仓库控制部82、搬运控制部83以及生产线控制部84通过有线与生产管理部81通信连接,位于生产管理部81的下位。
66.生产管理部81推进由对基板作业线9生产的基板产品的生产计划,管理生产的进展状况。详细而言,生产管理部81在开始基板产品的生产时、切换正在生产的基板产品的种类时,向仓库控制部82发出准备所需的器具类的指示。另外,生产管理部81向搬运控制部83发出将所准备的器具类从仓库系统1朝向对基板作业线9搬运的指示。
67.当所需的器具类被搬运并搭载至对基板作业线9的元件装配机91时,生产管理部81向生产线控制部84发出开始生产基板产品的指示。由此,对基板作业线9实施对基板作业,推进基板产品的生产。基板产品的生产实绩的信息从生产线控制部84被适当通知给生产管理部81。另外,当元件因生产的进展被消耗而减少时,减少后的元件的信息从生产线控制部84被通知给生产管理部81。生产管理部81向仓库控制部82以及搬运控制部83发出用于补给元件的指示。
68.仓库系统1构成为包括仓库控制部82。仓库控制部82通过有线与仓库模块各自通信连接。进而,仓库控制部82通过无线(用虚线表示)与机器人主体61通信连接。仓库控制部82基于从生产管理部81接收到的指示,向各仓库模块以及机器人主体61发出指令。另一方面,仓库控制部82从各仓库模块以及机器人主体61取得与动作状况相关的信息。
69.但是,关于元件收容器的搬入,仓库控制部82不接收生产管理部81的指示而推进控制。即,仓库控制部82在元件收容器被搬入到搬入口56时,指示信息赋予作业的实施。进而,仓库控制部82基于被搬入的元件收容器的种类以及数量,选择要保管的仓库,决定保管位置。之后,仓库控制部82对机器人主体61指令元件收容器的搬运,对所选择的仓库指示元件收容器的入库以及保管。进而,仓库控制部82将与所保管的元件收容器相关的信息通知给生产管理部81。
70.在元件收容器的搬入以外的控制中,仓库控制部82对第一元件收容器仓库21、第
二元件收容器仓库22以及元件供给单元仓库3指示器具类的入库、保管以及出库。另外,仓库控制部82对带盘装载机41以及托盘装载机42指示装填作业的实施。进而,仓库控制部82对搬运车停止部51指示器具类朝向搬运车52的装入作业、卸货作业。仓库模块各自实施被指示的动作、作业,并将其进展状况通知给仓库控制部82。
71.在来自生产管理部81的指示是装填作业的情况下,仓库控制部82首先对机器人主体61发出指令,搬运保管于任意一个仓库的元件收容器以及元件供给单元。接着,仓库控制部82对带盘装载机41或者托盘装载机42指示装填作业的实施。接着,仓库控制部82对机器人主体61发出指令,将准备好的器具类搬运至搬运车停止部51。
72.另外,在指示是器具类朝向元件装配机91的搬运作业的情况下,仓库控制部82对机器人主体61发出指令,将保管于任意一个仓库的器具类搬运至搬运车停止部51。在装填作业以及搬运作业中的任一情况下,仓库控制部82都对搬运车停止部51指示器具类朝向搬运车52的装入作业。
73.搬运控制部83通过无线(用虚线表示)与搬运车52通信连接。搬运控制部83控制搬运车52对器具类的搬运。搬运控制部83从生产管理部81接收指示,使搬运车停止部51停止搬运车52。当器具类被装入到搬运车52时,搬运控制部83使搬运车52从仓库系统1向元件装配机91行驶。被搬运车52搬运的器具类搭载于元件装配机91而被使用。此外,器具类相对于元件装配机91的搭载作业以及拆卸作业通过自动或者手动来进行。
74.生产线控制部84通过有线与构成对基板作业线9的对基板作业机各自通信连接。生产线控制部84控制对基板作业机各自的动作。生产线控制部84从生产管理部81接收指示,使对基板作业机实施对基板作业。生产线控制部84将基板产品的生产实绩的信息以及减少的元件的信息通知给生产管理部81。
75.当某种基板产品的生产结束时,在接下来的生产计划中不使用的闲置的器具类变得明确。生产管理部81向搬运控制部83以及仓库控制部82发出使闲置的器具类返回到仓库系统1的指示。此时,搬运控制部83控制从元件装配机91朝向仓库系统1的反方向的搬运。另外,仓库控制部82控制从搬运车停止部51朝向仓库或者装载机的反方向的入库动作。
76.4.第一实施方式的仓库系统1的动作
77.接着,参考图3所示的动作流程对第一实施方式的仓库系统1的动作进行说明。该动作流程主要通过来自仓库控制部82的控制而被推进。在图3的步骤s1中,仓库控制部82调查是否向搬入口56搬入了元件收容器。在搬入了元件收容器的情况下的步骤s2中,搬入兼信息赋予部55实施信息赋予作业。
78.在接下来的步骤s3中,仓库控制部82选择对被赋予了个体识别信息的元件收容器进行保管的仓库,进而决定保管位置。在接下来的步骤s4中,搬运机器人6将该元件收容器搬运至所选择的仓库。所选择的仓库接收该元件收容器并入库到所决定的保管位置。在步骤s4之后、以及在步骤s1中未搬入元件收容器的情况下,动作流程的执行进入步骤s5。
79.在步骤s5中,仓库控制部82确认是否从生产管理部81接收到指示。在接收了指示的情况下的步骤s6中,仓库控制部82调查指示的内容,决定动作流程的分支目的地。即,仓库控制部82在指示为搬运作业的情况下将步骤s11设为分支目的地,在为装填作业的情况下将步骤s21设为分支目的地,在为分离作业的情况下将步骤s31设为分支目的地。
80.在搬运作业的情况下的步骤s11中,仓库控制部82对保管有应搬运的器具类的仓
库模块指示出库。接收到了指令的仓库模块将器具类出库至交接口。接着,仓库控制部82对机器人主体61指示搬运。搬运机器人6从仓库模块的交接口接收器具类,并搬运至搬运车停止部51。
81.步骤s11在元件装配机91中元件的剩余数量减少而进行带盘71、托盘75的更换作业的情况下被执行。另外,步骤s11是针对暂时保管于带盘装载机41的准备完毕供料器装置73或者准备完毕带盘盒来执行的。进而,步骤s11是针对暂时保管于托盘装载机42的准备完毕托盘装填单元77来执行的。在步骤s11之后,动作流程的执行与步骤s24(后述)汇合。
82.在步骤s6中为装填作业的情况下的步骤s21中,仓库控制部82以对成为所指示的装填作业的对象的元件收容器以及元件供给单元进行搬运的方式发出指令。以下,对带盘71以及托盘75保管于第二元件收容器仓库22的情况进行说明。在带盘71以及托盘75保管于第一元件收容器仓库21的情况下,将以下的说明中的第二元件收容器仓库22置换为第一元件收容器仓库21。
83.在将带盘71装填于供料器装置72或者带盘盒的情况下,仓库控制部82首先向第二元件收容器仓库22指示带盘71的出库,接着,向机器人主体61指示搬运。第二元件收容器仓库22按照指令,将带盘71出库至交接口。机器人主体61从第二元件收容器仓库22接收带盘71,并搬运至带盘装载机41。
84.接着,仓库控制部82对元件供给单元仓库3指示供料器装置72或者带盘盒的出库,接着,对机器人主体61指示搬运。元件供给单元仓库3按照指令,将供料器装置72或者带盘盒出库至交接口。机器人主体61从元件供给单元仓库3接收供料器装置72或者带盘盒,并搬运至带盘装载机41。此外,机器人主体61也可以将带盘71、供料器装置72或者带盘盒一起搬运。
85.在接下来的步骤s22中,带盘装载机41实施将带盘71装填于供料器装置72或者带盘盒的作业。接着,带盘装载机41将准备完毕供料器装置73或者准备完毕带盘盒载置于交接口。进而,带盘装载机41将装填作业结束的主旨通知给仓库控制部82。在接下来的步骤s23中,接收到通知的仓库控制部82对机器人主体61指示搬运。机器人主体61从带盘装载机41接收准备完毕供料器装置73或者准备完毕带盘盒,并搬运至搬运车停止部51。
86.在接下来的步骤s24中,仓库控制部82对搬运车停止部51指示准备完毕供料器装置73或者准备完毕带盘盒朝向搬运车52的装入作业。之后的朝向元件装配机91的搬运是通过来自搬运控制部83的控制来实施的。在步骤s24之后,动作流程的执行返回到步骤s1。另外,在将托盘75装填于托盘装填单元76的情况下,除了托盘装载机42实施装填作业以外,执行与上述步骤s21至步骤s24相同的动作。
87.在步骤s6中为分离作业的情况下的步骤s31中,仓库控制部82以使从元件装配机91返回的器具类返回到带盘装载机41或者托盘装载机42的方式发出指令。例如,在从准备完毕供料器装置73或者准备完毕带盘盒取下带盘71的分离作业的情况下,仓库控制部82首先对搬运车停止部51指示从搬运车52对准备完毕供料器装置73或者准备完毕带盘盒进行卸货作业,接着,对机器人主体61指示搬运。搬运车停止部51按照指令,将准备完毕供料器装置73或者准备完毕带盘盒卸货并载置于交接口。机器人主体61从搬运车停止部51接收准备完毕供料器装置73或者准备完毕带盘盒,并搬运到带盘装载机41。
88.在接下来的步骤s32中,带盘装载机41实施将带盘71从准备完毕供料器装置73或
者准备完毕带盘盒取下的分离作业。接着,带盘装载机41将分别形成的带盘71、供料器装置72或者带盘盒载置于交接口。进而,带盘装载机41将分离作业结束的主旨通知给仓库控制部82。
89.在接下来的步骤s33中,接收到通知的仓库控制部82对机器人主体61指示搬运。机器人主体61从带盘装载机41接收带盘71、供料器装置72或者带盘盒。接着,机器人主体61使带盘71返回到第二元件收容器仓库22,使供料器装置72或者带盘盒返回到元件供给单元仓库3。在步骤s33之后,动作流程的执行返回步骤s1。另外,在将托盘75从准备完毕托盘装填单元77卸下的分离作业的情况下,除了托盘装载机42实施分离作业这点以外,执行与步骤s31至步骤s33相同的动作。
90.此外,上述分离作业不是必须的。即,也可以将从元件装配机91返回的准备完毕供料器装置73或者准备完毕带盘盒以能够使用的状态保管于带盘装载机41或者元件供给单元仓库3。根据该保管方法,在隔着休止期间被间歇地使用的带盘71、供料器装置72或者带盘盒的组合中,能够削减带盘71的拆卸作业以及再次的装填作业。同样地,也可以将从元件装配机91返回的准备完毕托盘装填单元77以能够使用的状态保管于托盘装载机42或者元件供给单元仓库3。
91.另外,也存在有来自生产管理部81的指示为多个的情况。例如,在指示了朝向三个供料器装置72或者带盘盒的装填作业的情况下,仓库控制部82将步骤s21至步骤s24反复执行三次。由此,搬运车52能够一起搬运三个准备完毕供料器装置73或者三个准备完毕带盘盒。
92.进而,存在有搬运车52使闲置的器具类从元件装配机91返回至搬运车停止部51、接着将准备好的器具类向元件装配机91搬运的情况。在该情况下,仓库控制部82预先执行与应准备的器具类相对应的步骤s21至步骤s24,之后执行与返回的器具类相对应的步骤s31至步骤s33。由此,搬运车52在停止于搬运车停止部51之后没有延迟地连续进行返回的器具类的卸货作业以及准备好的器具类的装入作业,因此是高效的。
93.在第一实施方式的仓库系统1中,搬运机器人6将保管于第二元件收容器仓库22的元件收容器(带盘71、托盘75)向元件收容器装载机(带盘装载机41、托盘装载机42)搬运,并且将保管于元件供给单元仓库3的元件供给单元(供料器装置72、带盘盒、托盘装填单元76)向元件收容器装载机搬运。另外,元件收容器装载机向元件供给单元装填元件收容器。由此,在元件装配机91中自动地完成使用元件供给单元的准备。因而,操作者不参与装填作业,与以往相比能够实现进一步的省力化。
94.此外,由于七个仓库模块具有通用要素,因此仓库模块的增设简单。因而,容易应对器具类的保管量的增加,应对所需的成本也低廉。另外,由于能够将多种仓库模块自由地组合而构成仓库系统1,因此除了保管功能以外还能够附加信息赋予作业等作业实施功能,与以往相比能够实现进一步的省力化。
95.5.第二实施方式的仓库系统1a
96.参照图4对第二实施方式的仓库系统1a进行说明。如图4所示,在第二实施方式的仓库系统1a中,多个仓库模块在高度方向上被分为下段以及上段地配置。下段的仓库模块的种类以及配置与第一实施方式一致。上段的仓库模块的种类以及配置为从下段的结构中省略了搬运车停止部51的结构。
97.另外,搬运机器人6a由分别负责下段以及上段的两组机器人主体61及移动路62、以及升降机65等构成。负责上段的机器人主体61能够利用升降机65向下段的移动路62移动,并向仅设于下段的搬运车停止部51移动。两台机器人主体61由仓库控制部82控制,一边避免碰撞一边移动。
98.在第二实施方式中,各仓库模块的构造以及功能、搬运机器人6a的动作等与第一实施方式相同。由于在第二实施方式的仓库系统1a中,仓库模块配置为上下两段,因此与第一实施方式相比,能够不增加设置空间而使器具类的保管量增加两倍左右。进而,仓库模块能够配置为三段以上,以更高的空间效率保管多个器具类。
99.6.实施方式的应用以及变形
100.此外,也可以省略搬运车停止部51、搬运车52以及搬运路53,由操作者将准备好的器具类搬运至元件装配机91。另外,也可以由单独的带盘卸载机实施带盘装载机41所实施的分离作业。同样地,也可以由单独的托盘卸载机来实施托盘装载机42所实施的分离作业。
101.另外,第一元件收容器仓库21、第二元件收容器仓库22以及元件供给单元仓库3也可以保管基板的原材料、一部分元件未装配的未完成的基板产品、由基板检查机判定为不合格而需要修理的基板产品等。另外,仓库系统(1、1a)也可以保管在焊料印刷装置中使用的焊料以及丝网、刮板等器具,能够从搬运车停止部51向焊料印刷装置搬运。除此以外,第一实施方式以及第二实施方式能够进行各种应用、变形。
102.附图标记说明
103.1、1a:仓库系统21:第一元件收容器仓库22:第二元件收容器仓库3:元件供给单元仓库41:带盘装载机42:托盘装载机51:搬运车停止部52:搬运车53:搬运路55:搬入兼信息赋予部56:搬入口6:搬运机器人61:机器人主体62:移动路63:非接触送电部64:非接触受电部65:升降机71:带盘72:供料器装置73:准备完毕供料器装置75:托盘76:托盘装填单元77:准备完毕托盘装填单元8:生产管理系统81:生产管理部82:仓库控制部83:搬运控制部84:生产线控制部9:对基板作业线91:元件装配机。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。