一种可实现最低平均充电能耗的ev储能充电网络规划方法
技术领域
1.本发明属于储能系统充电技术领域,涉及一种可实现最低平均充电能耗的ev储能充电网络规划方法。
背景技术:
2.电动汽车(electric vehicle,ev)对减少交通网络中的碳排放起到重要作用,也是国家政策扶持的 对象之一。现阶段ev补充能量的主要方式仍是充电,储能充电网络的规划称为电动汽车储能相关产业亟 需解决的重要问题。
3.针对路网中车辆出行需求时空动态变化问题,文献一《基于动态交通仿真的高速公路ev充电站规划》 (电工技术学报,2018年,第33卷,第13期,第2991页至3001页)提出了基于路段传播模型ltm的仿 真方法,利用m/m/s排队模型计算ev充电等待时间,以ev日充电等待时间与年建设运维成本最小为优化 目标建立优化规划模型,采用多目标粒子群算法和vikor理论求解规划模型。然而,该文献没有充分考虑 到ev至充电站的行驶距离。文献二《基于变权voronoi图和混合粒子群算法的ev充电站规划》(电工技 术学报,2017年,第32卷,第19期,第160页至169页)基于voronoi图引入可随充电站服务能力和最 大服务半径约束动态调整的变权重系数,在保证充电站服务能力的同时,以充电站投运与用户充电行驶成 本之和最小为优化目标建立模型,采用混合离散粒子群-变权voronoi图算法对充电站的数目、选址与容 量进行优化。该文献考虑到了充电站的服务能力,并从车主角度出发考虑到了用户充电行驶成本,但未考 虑到ev充电行驶距离,具有一定的局限性。文献三《综合考虑充电需求和配电网接纳能力的电动汽车充 电站规划》(电网技术,2021年,第45卷,第2期,第498页至509页)基于ev出行大数据,利用马尔 科夫原理和轮盘赌法预测充电需求时空分布,在此基础上筛选候选候址和配电网接入方案,并通过熵权修 正的层次分析法评估配电网的接纳能力,采用遗传算法求解以建设运营成本为优化目标的规划模型。然而, 该文献提出的方法没有充分考虑ev充电行驶距离,具有一定的局限性。事实上,合理的储能充电网络的 规划设计,除了考虑建设运营成本外,还需考虑ev为了充电而行驶的距离,进而降低因充电而产生的能 耗。因此,亟需提出一种考虑充电带来的能耗的ev充电网络优化规划的方法,通过优化充电站建设地址, 降低ev平均充电行驶距离,提高车主充电的便利性。然而,现有方法在ev充电网络的规划过程中,均未 充分考虑到ev至充电站的行驶距离,难以为ev充电网络建设提供参考。
技术实现要素:
4.针对现有技术中存在的不足,本发明的目的是提供一种可实现最低平均充电能耗的ev储能充电网络 规划方法,能够在储能充电站建设数目给定的情况下,通过优化ev储能充电站的建设地址,可实现ev 充电过程中的平均充电能耗达到最低,同时确保ev需要充电时行驶至储能充电站的不超过给定里程阀值 的机会约束在合理范围内,给出ev充电网络的最优建设方案。
5.一种可实现最低平均充电能耗的ev储能充电网络规划方法,包括以下步骤:
6.s1:设定规划边界条件,所述规划边界条件包括:交通网络拓扑结构与参数、储能充电站候选地址、 储能充电站建设总数、充电行驶里程阀值和置信度;所述储能充电站候选地址均为交通网络中的交通节点;
7.s2:建立ev储能充电网络规划模型;所述ev储能充电网络规划模型的优化目标为ev平均充电行 驶距离最短,所述ev储能充电网络规划模型的机会约束为ev充电行驶距离概率约束;
8.所述充电行驶距离概率约束为整个交通网络中ev的充电行驶距离不超过充电行驶里程阀值的概率大 于预设的置信度;
9.所述储能充电站建设数目约束如下式所示:
[0010][0011]
其中,m为储能充电站建设总数;n为交通网络中的储能充电站候选地址数量;yj为储能充电网络规 划模型中的优化变量,取“1”表示在候选地址j建设储能充电站,取“0”表示未在候选地址j建设储能充电站
[0012]
s3:根据所述规划边界条件,采用基于可行性法则的遗传算法对所述ev储能充电网络规划模型进行 求解,得到可实现最低平均能耗的ev储能充电站最优建设方案;
[0013]
其中,所述采用基于可行性法则的遗传算法对所述ev储能充电网络规划模型进行求解包括:
[0014]
s31.根据ev储能充电网络规划模型的特征设计染色体编码方案,并生成初始染色体种群;
[0015]
所述根据ev充电网络优化规划模型的特征设计染色体编码方案是指采用长度为n的二进制码串表示 待求ev充电网络规划模型的解,所述二进制码串中的每一个码位对应一个储能充电站候选地址;
[0016]
所述生成初始染色体种群具体为:首先,将初始种群中各染色体的所有码位赋值为“0”;然后,在每 条染色体中随机选取m个码位,将赋值由“0”变为“1”;
[0017]
s32.基于可行性法则确定各染色体的优先度,获得各个染色体在种群中的排序,然后根据各个染色体 在种群中的排序设计染色体适应度;
[0018]
所述基于可行性法则确定各染色体优先度具体为:
[0019]
将满足所述机会约束的染色体作为可行解,而将不满足所述机会约束的染色体当做非可行解,并按以 下原则确定各染色体优先度,得到染色体k在种群中的排序;
[0020]
(1)任意可行解都优于非可行解;
[0021]
(2)对可行解来说,ev至最近充电站的平均行驶距离d
ave
越小,优先度越高;
[0022]
(3)对非可行解来说,根据机会约束的违反约束的程度确定优先度,违反约束的程度越小,优先度 越高,若染色体k对应的规划方案为非可行解,则其约束违反程度c
v,k
可由下式计算:
[0023][0024]
其中,p
ev,k
为第k条染色体对应的规划方案中电动汽车充电行驶距离不超过给定
里程阀值的概率,c
v,k
表示第k条染色体对应的规划方案的约束违反程度,β为置信度;
[0025]
s33.根据ev储能充电网络规划模型的特征设计交叉操作算子和变异操作算子;
[0026]
s34.根据所述规划边界条件,计算交通网络参数,并采用遗传算法对ev储能充电网络规划模型进行 求解。
[0027]
进一步的,ev储能充电网络规划模型中,所述ev储能充电网络规划模型的优化目标具体表示为如 下公式:
[0028][0029]
其中,d
ave
为交通网络中所有ev至最近充电站的平均行驶距离;ωr为交通网络中的道路集合;ti为 道路i的车流量;d
av,i
为道路i上行驶ev的平均充电行驶距离。
[0030]
进一步的,所述道路i上行驶ev的平均充电行驶距离的计算公式如下:
[0031][0032]
其中,l
d,i
为道路i的长度;fi(x)为道路i上距起点距离为x处ev的充电行驶距离。
[0033]
进一步的,所述道路i的车流量由交通网络最短路径集合ωq中经过道路i的最短路径车流量求和而得; 所述最短路径车流量的计算公式如下:
[0034][0035]
式中,w
s,q
与w
e,q
分别为最短路径q的起点与终点权系数;ωq为交通网络最短路径集合;dq为最短 径q的长度。
[0036]
进一步的,所述道路i上距起点距离为x处ev的充电行驶距离的计算公式如下:
[0037]fi
(x)=min[x l1,l
d,i-x l2]0≤x≤l
d,i
[0038]
其中,x为随机变量,表示道路i上行驶的ev与道路i的起点的距离;l
d,i
表示道路i的长度;l1表示 距道路i起点最近的储能充电站与道路i起点的距离;l2为距道路i终点最近充电站的距离。
[0039]
进一步的,所述ev充电行驶距离概率约束如下式所示:
[0040][0041]
其中,pi为道路i上ev充电行驶里程不超过充电行驶里程阀值的概率,β为置信度。
[0042]
进一步的,道路i上ev的充电行驶距离不超过充电行驶里程阀值的概率可由下式计算:
[0043][0044][0045]
其中,gi(x)为判断ev在道路i上距端点x处充电行驶距离是否不超过充电行驶里程阀值的辅助函数,d
cha-lim
为充电行驶里程阀值。
[0046]
进一步的,所述染色体适应度的计算公式如下:
[0047]vfit,k
=n
pop-v
index,k
1,
[0048]
其中,n
pop
为种群中染色体的条数,v
fit,k
为第k个染色体的适应度,v
index,k
为染色体k在种群中的排 序。
[0049]
与现有技术相比,本发明具有以下技术效果:
[0050]
(1)本发明在考虑充电站建设数目给定的情况下,将ev驶向充电站的行驶距离不超过给定里程阀值 的概率保持在较高水平,以ev驶向充电站的平均行驶距离最短为目标,给出了可实现最低平均能耗的ev 充电网络最优建设方案。
[0051]
(2)本发明中,将满足机会约束的染色体作为可行解,根对应的规划方案中ev至最近充电站的平均 行驶距离d
ave
确定染色体的优先度;将不满足机会约束的染色体作为非可行解,根据对应的规划方案的约 束违反程度确定染色体优先度,然后,根据染色体优先度计算适应度,采用基于可行性法则的遗传算法对 所述ev储能充电网络规划模型进行求解。该方法避免了因严格要求ev充电行驶距离不超过规定的里程 阀值导致可能会导致不合理的规划结果的问题。
附图说明
[0052]
图1为本发明实施例提供的ev充电行驶距离计算示意图;
[0053]
图2为本发明实施例提供的染色体编码方案;
[0054]
图3为本发明实施例交叉操作算子示意图;
[0055]
图4为本发明实施例求解时的变异操作示意图。图5为本发明实施例的算法流程图;
[0056]
图6为本发明实施例提供的25节点交通系统拓扑;
[0057]
图7为本发明实施例中每代最优染色体对应的平均充电行驶距离;
[0058]
图8为本发明实施例中每代最优染色体对应的充电行驶距离不超过阀值的概率;
[0059]
图9为本发明实施例得到的充电网络规划方案。
具体实施方式
[0060]
下面结合附图对本发明作进一步的解释说明,以便本领域的技术人员可以更深入地理解本发明并能够 顺利实施,但下面的参考实例仅用于解释本发明,不作为本发明的限定。
[0061]
本发明实施例提供了一种可实现最低平均充电能耗的ev储能充电网络规划方法,包括以下步骤:
[0062]
s1:设定规划边界条件,所述规划边界条件包括:交通网络拓扑结构与参数、储能充电站候选地址、 储能充电站建设总数、充电行驶里程阀值和置信度;所述储能充电站候选地址均为交通网络中的交通节点。
[0063]
s2:建立ev储能充电网络规划模型.
[0064]
1.ev储能充电网络规划模型的优化目标
[0065]
ev储能充电网络规划模型的优化目标为ev平均充电行驶距离最短,具体如公式(1)所示:
[0066][0067]
公式(1)中,其中,d
ave
为交通网络中所有ev至最近充电站的平均行驶距离;ωr为交通网络中的道路 集合;ti为道路i的车流量;d
av,i
为道路i上行驶ev的平均充电行驶距离。
[0068]
1)道路i的车流量的计算
[0069]
道路i的车流量由交通网络最短路径集合ωq中经过道路i的最短路径车流量求和而得。
[0070]
假定ev总是沿着交通节点(交通网络中的重要节点)间的最短路径行驶。最短路径车流量可由重力 空间互动模型计算得出,重力空间互动模型如公式(2)所示:
[0071][0072]
公式(2)中,w
s,q
与w
e,q
分别为最短路径q的起点与终点权系数;ωq为交通网络最短路径集合,可 通过flyod算法得出;dq为最短路径q的长度,可由该最短路径q经过的道路集与道路长度计算。
[0073]
2)道路i上某ev充电行驶距离的计算
[0074]
交通网络中,ev产生充电需求后,车主将在以百度地图为代表的导航软件引领下,行驶至距离最近 的充电站进行充电,图1为ev充电行驶距离计算示意图。
[0075]
图1中,ab表示交通网络中的道路,长度为l
ab
;距离交通节点a最近的充电站位于交通节点c, ac表示交通节点a至c的最短路径,长度为l
ac
;距离交通节点b最近的充电站位于交通节点d,bd表 示交通节点b至d的最短路径,同样由若干道路与交通节点组成,长度为l
bd
。道路ab上,某台ev距 交通节点a的距离为x(0≤x≤l
ab
),若其产生充电需求,有两个待选充电方案:1)途经交通节点a,到达 建在交通节点c的充电站充电,充电行驶距离为x l
ac
;2)途径交通节点b,到达建在交通节点d的充电 站充电,充电行驶距离为l
ab-x l
bd
。显然,车主会选择距离最近的充电站进行充电,道路上某ev充电行 驶距离f(x)可按下式进行计算:
[0076]
f(x)=min[x l
ac
,l
ab-x l
bd
]0≤x≤l
ab
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(3)
[0077]
从式(3)可看出,充电行驶距离与交通网络拓扑结构、充电站建设状况以及ev在道路上的位置等多 种因素有关。
[0078]
根据公式(3),可以将道路i上距起点距离为x处ev的充电行驶距离fi(x)表示为公式(4)所示:
[0079]fi
(x)=min[x l1,l
d,i-x l2]0≤x≤l
d,i
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(4)
[0080]
公式(4)中,x表示道路i上行驶的ev距道路i的端点交通节点a的距离,x为随机变量,服从区 间[0,l
d,i
]上的均匀分布;l
d,i
表示道路i的长度;l1表示距道路i起点最近的储能充电站与道路i起点的距离; l2为距道路i终点最近充电站的距离。
[0081]
3)道路i上行驶的电动汽车的平均充电行驶距离d
av,i
的计算
[0082]
道路i上行驶的电动汽车的平均充电行驶距离d
av,i
的计算具体如公式(4)所示。
[0083][0084]
公式(4)中,l
d,i
为道路i的长度;x为待充电ev距离道路i端点的距离;fi(x)为道路
i上某ev的充 电行驶距离;。
[0085]
公式(4)中,参数l1、l2的取值与充电网络建设地址有关。
[0086]
2.ev储能充电网络规划模型的机会约束
[0087]
1)充电行驶距离机会约束
[0088]
现阶段,与传统燃油汽车相比,绝大多数型号ev的续航里程仍较为有限,因此,进行储能充电网络 时,需要设置充电行驶里程阀值用于对充电汽车的行驶距离进行约束。交通网络中,ev充电行驶距离是 随机变量,因此,严格要求ev充电行驶距离不超过规定的充电行驶里程阀值过于严格,可能会导致不合 理的规划结果。故本发明进行如下充电行驶距离机会约束设计:
[0089][0090]
其中,pi为道路i上ev充电行驶里程不超过充电行驶里程阀值的概率,β为ev充电行驶里程约束满 足的置信度。
[0091]
道路i上ev充电行驶里程不超过充电行驶里程阀值的概率pi的计算公式如下:
[0092][0093]
式(7)中,gi(x)为判断ev在道路i上距起点x处充电行驶距离是否不超过里程阀值的辅助函数,有
ꢀ“
0”和“1”两种取值,具体如下:
[0094][0095]
2)储能充电站建设数据约束
[0096]
储能充电网络规划中,规划人员根据充电网络建设拟投资额、市政规划与ev渗透率等边界条件确定 交通网络中的充电站建设数目与待选地址,因此,模型存在以下约束:
[0097][0098]
式(9)中,m为充电站建设数目;n为交通网络中的充电站候选地址,位于交通网络节点;yj为充电 网络规划模型中的优化变量,取“1”表示在候选地址j建设充电站,取“0”表示未在候选地址j建设充 电站。
[0099]
s3:根据所述规划边界条件,采用基于可行性法则的遗传算法对步骤s2得到的ev储能充电网络规 划模型进行求解,得到可实现最低平均能耗的ev储能充电站最优建设方案。
[0100]
s31.根据ev储能充电网络规划模型的特征设计染色体编码方案,并生成初始染色体种群
[0101]
ev充电网络规划模型为0-1整数规划问题,本文采用二进制编码方式对其进行编码、构成染色体, 即采用长度为n的二进制码串表示待求ev充电网络规划模型的解,染色体的示意图具体如图2所示。图 2中,码位j取值状况表征是否在候选地址j建设储能充电站:取值为“1”表示在该候选地址建设储能充 电站;反之,则表示未在该候选地址建设储能充电站。为满足储能充电站建设数目(m)约束,图2中, 有且仅有m个二进制码为取值为“1”。为
满足这一要求,按以下方法随机生成初始染色体种群:
[0102]
1)将初始种群中各染色体的所有码位赋值为“0”;
[0103]
2)在每条染色体中随机选取m个码位,将赋值由“0”变为“1”。
[0104]
s32.基于可行性法则确定各染色体的优先度,获得各个染色体在种群中的排序,然后根据各个染色体 在种群中的排序设计染色体适应度;
[0105]
适应度计算是ga的核心,种群进化中,适应度越高的染色体,复制到下一代种群的概率越大,从而 推动种群不断进化,直至获得待求优化问题的最优解。
[0106]
本发明提出的ev充电网络规划模型为考虑机会约束的0-1整数规划问题,一般来讲,可利用罚函数 法处理机会约束,并以此为基础计算染色体适应度。不过,惩罚系数选取比较困难,需要通过反复试验才 能确定,并带有主观性。因此,本发明基于可行性法则计算染色体适应度,具体为:
[0107]
将满足机会约束的染色体作为可行解,而将不满足机会约束的染色体当做非可行解,并按以下原则确 定各染色体优先度:
[0108]
1)任意可行解都优于非可行解;
[0109]
2)对可行解来说,ev至最近充电站的平均行驶距离d
ave
越小,优先度越高;
[0110]
3)对非可行解来说,根据机会约束的违反约束的程度确定优先度,违反约束的程度越小,优先度越
[0111]
高。若染色体k对应的规划方案为非可行解,则其约束违反程度c
v,k
可由下式计算:
[0112][0113]
按优先度对种群中所有染色体排序之后,按下式计算各染色体适应度:
[0114]vfit,k
=n
pop-v
index,k
1
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(11)
[0115]
式中,v
index,k
为染色体k在种群中的排序。从该式可看出,染色体优先度越高,在种群中的排序越靠 前,适应度越大。
[0116]
s33.根据ev储能充电网络规划模型的特征设计交叉操作算子和变异操作算子;
[0117]
1)交叉操作算子
[0118]
为确保交叉后的染色体满足储能充电站建设数目约束,本发明对传统交叉操作算子进行了改进,得到 本发明设计的交叉操作算子,具体如图3所示。本发明交叉操作算子分为3步,具体操作步骤如下:
[0119]
步骤1:从当前种群中随机选取两条染色体作为待交叉染色体。
[0120]
步骤2:随机选择码位n
cro
作为待交叉位(1《n
cro
《n),若两条染色体在码位n
cro
后取值为“1”的码位 数相同,则该码位为可行交叉位n
av
;否则,继续执行上述步骤,直至找到满足要求的可行交叉位。
[0121]
步骤3:以交叉概率pc交换两条待交叉染色体可行交叉位n
av
后的二进制码串。
[0122]
2)变异操作算子
[0123]
为确保染色体变异后依然满足储能充电站建设数目约束,本发明对传统单点变异操作算子进行了改 进,提出了本发明两点变异操作算子,具体操作示意图如图4所示。
[0124]
本发明提供的两点变异操作算子分为3步,具体操作步骤如下:
[0125]
步骤1:从当前种群中随机选择一条染色体作为待变异染色体。
[0126]
步骤2:在待变异染色体上随机选择两个不同码位n
mut1
和n
mut2
作为待变异码位(1≤n
mut1
≤n, 1≤n
mut2
≤n),码位n
mut1
和码位n
mut2
的取值不能相同。
[0127]
步骤3:以变异概率pm同时对码位n
mut1
和n
mut2
进行变异操作。
[0128]
s34.根据所述规划边界条件,计算交通网络参数,并采用遗传算法对ev储能充电网络规划模型进行 求解。
[0129]
首先,根据交通网络拓扑结构,利用floyd算法确定交通网络中的最短路径集ωq,以及各最短路径经 过的交通道路与节点;接着,通过式(1)计算各最短路径的车流量fq(q∈ωq),以此为依据,计算各交通 道路的车流量ti(i∈ωr)。
[0130]
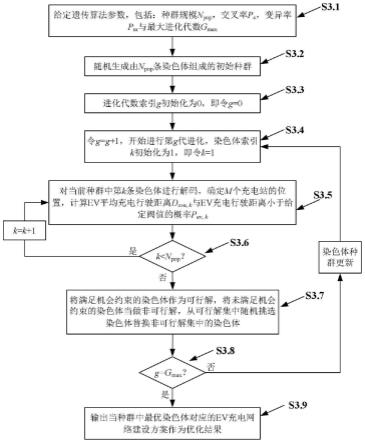
求解步骤具体如下:
[0131]
s3.1:设定遗传算法参数,包括:种群规模n
pop
,交叉率pc,变异率pm与最大进化代数g
max
;
[0132]
s3.2:随机生成由n
pop
条染色体组成的初始种群;所述初始种群中的染色体为n个码位组成的二进制 码串,第j个码位取值为“1”时在候选地址j建设充电站,否则不在候选地址j建设充电站;公式(9)给出 的约束条件表明,ev充电网络中的充电站建设数目总数为m,因此各染色体中有且仅有m个码位取值为
ꢀ“
1”;
[0133]
s3.3:进化代数索引g初始化为0,即令g=0;
[0134]
s3.4:令g=g 1,开始第g代进化,染色体索引k初始化为1,即令k=1;
[0135]
s3.5:对当前种群中的第k条染色体进行解码,确定m个ev充电站在交通网络中的建设位置,根据 步骤s2中的规划模型计算出第k条染色体代表的规划方案下,ev至最近充电站的平均行驶距离d
ave,k
与 ev充电行驶距离不超过给定里程阀值的概率p
ev,k
;
[0136]
s3.6:判断是否计算出当前种群中所有染色体的d
ave,k
与p
ev,k
,即判断染色体索引k是否等于种群规 模n
pop
;若k《n
pop
,则令k=k 1,并跳转至步骤s3.5,继续计算种群中其他染色体的d
ave,k
与p
ev,k
;否则, 继续执行下一步骤s3.7;
[0137]
s3.7:将满足机会约束的染色体作为可行解,将未满足机会约束的染色体当做非可行解,从可行解集 中随机挑选染色体替换非可行解集中的染色体,具体步骤如下:
[0138]
s3.7.1:根据各染色体的p
ev
值,判断其是否满足公式(5)给出的机会约束,若满足,该染色体归入可行 解集,否则,归入非可行解集。可行解集中,染色体数目记为n1;非可行解集中,染色体数目记为n2;
[0139]
s3.7.2:根据公式(10)计算可行解集中各染色体的适应度v
fit,m
;
[0140][0141]
公式(10)中,m为可行解集中的染色体索引,1≤m≤n1;d
ave,m
为可行解集中第m条染色体的平均充电行 驶距离。
[0142]
s3.7.3:以可行解集中的染色体适应度为依据,采用“二元锦标赛”从可行解种群中随机选择n2条染 色体替换当前种群非可行解集中的染色体;
[0143]
s3.8:判断是否达到最大进化代数,即判断进化代数索引g是否等于最大进化代数g
max
;若g=g
max
, 则继续执行步骤s3.9;否则,以适应度为依据,采用“锦标赛”法对当前染色体种群进行复制、交叉与变 异操作,更新染色体种群,并跳转至步骤s3.4;
[0144]
步骤s3.8所述的交叉操作算子,具体步骤如下:(a)从当前染色体种群中随机选取
两条染色体作为 待交叉染色体;(b)反复随机生成待选交叉位n
cro
(1《n
cro
《n),直至找到可行交叉位n
av
;(c)以交叉概率 pc交换两条染色体交叉位n
av
后的二进制码串,完成交叉操作。
[0145]
步骤s3.8所述的变异操作算子,具体步骤如下:步骤一:从当前染色体种群中随机选取一条染色体 作为待变异染色体;步骤二:随机生成两个待变异码位n
mut1
与n
mut2
(1≤n
mut1
≤n,1≤n
mut2
≤n);步骤三:以 变异概率pm同时对待变异码位n
mut1
与n
mut2
进行变异操作,取值为“1”的待变异码位变异为“0”,取值 为“0”的待变异码位变异为“1”。
[0146]
s3.9:将当前种群中适应度最高的染色体对应的充电网络建设方案作为ev充电网络最优规划方案输 出,结束算法流程。
[0147]
为验证本文所提ev充电网络规划模型与基于ga的求解方法的有效性,本节以25节点交通系统为例 进行了仿真分析。
[0148]
25节点交通系统拓扑如图6所示,由25个交通节点与43条道路组成,各交通节点的权重如表1所示。
[0149]
表1.交通节点权重系数
[0150][0151]
图6中,道路仅表示各交通节点间的拓扑关系,并不代表各道路的实际走向。算例中,假定各道路均 可双向通行,即从起点到终点的最短路径与从终点返回起点的最短路径相同。此时,该交通网络的最短路 径集ωq由300条最短路径构成,即[25
×
(25-1)]/2=300条,各最短路径经过的交通节点和道路可通过floyd 算法求得。所有最短路径的车流量之和为0.307,所有道路上的车流量之和为0.84。算例中,拟建造充电 站的数目为4。目前,主流ev满充状态下的续航里程大多界于在300至500km之间,考虑到大部分ev 车主在剩余电量20%左右进行充电,因此,算例将充电行驶里程阀值d
cha-lim
设为80km;充电行驶距离机 会约束的置信度β设为95%。
[0152]
采用ga对ev充电网络规划模型进行求解,算法参数设置为:种群规模n
pop
为50,交叉率pc为0.5, 变异率pm为0.2,最大进化代数g
max
为150。ga进化中,每代最优染色体对应的ev平均充电行驶距离 与充电行驶距离不超过给定里程阀值的概率分别如图7与图8所示。
[0153]
具体的,本发明建立了基于机会约束的ev充电网络优化规划模型,优化变量为各充电站的建设地址, 优化目标为ev至充电站的平均行驶距离最小,具体约束条件为:ev至充电站的行驶距离不超过给定里 程阀值的概率为机会约束,充电站建设数目为等式约束。ev充电网络优化规划模型为考虑机会约束的0-1 整数规划问题,优化目标、约束条件与优化变量间缺少明确的解析表达式,可采用基于可行性法则的遗传 算法进行求解。为采用遗传算法求解ev充电网络优化规划模型,根据待求优化模型的特征设计染色体编 码方案以及变异与交叉算子。染色体解码后,基于可行性法则计算染色体的适应度,输出最终规划方案, 确定充电站的建设地址。求解中,预先设定最大进化代数,一旦遗传算法进化到最大代
数,便认为算法收 敛,输出最终规划结果。
[0154]
以上所述的具体实施方案,对本发明的目的、技术方案和有益效果进行了进一步的详细说明,所应理 解的是,以上所述仅为本发明的具体实施方案而已,并非用以限定本发明的范围,任何本领域的技术人员, 在不脱离本发明的构思和原则的前提下所做出的等同变化与修改,均应属于本发明保护的范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。