1.本发明涉及支承装置以及异物去除方法。
背景技术:
2.已知有一种支承装置,其用第一支承面支承第一支承对象物,用第二支承面支承第二支承对象物(例如参照文献1:日本特开2020-87959号公报)。
3.在文献1所记载的片材粘附装置ea(支承装置)中,为了从支承面42a(第一支承面)上以及支承面12a(第二支承面)上去除异物而跨越这些第一、第二支承面进行吸引时,来自第一支承面与第二支承面的间隙cl的空气的流入量变多,不能充分确保吸引第一、第二支承面的吸引力,产生不能可靠地去除异物这一不良情况(参照图1d)。
技术实现要素:
4.本发明的目的在于提供能够从第一、第二支承面上可靠地去除异物的支承装置以及异物去除方法。
5.本发明采用了权利要求所记载的构成。
6.根据本发明,由于封堵间隙,因此可充分地确保吸引第一、第二支承面的吸引力,能够从第一、第二支承面上可靠地去除异物。
7.另外,如果基于异物感测单元的感测结果进行吸引,则在第一、第二支承面上未感测到异物的情况下,能够不进行吸引,因此能够抑制消耗不必要的能量。
附图说明
8.图1a是本发明的一实施方式的支承装置的说明图。
9.图1b是本发明的一实施方式的支承装置的说明图。
10.图1c是本发明的一实施方式的支承装置的说明图。
11.图1d是发明将要解决的课题的说明图。
具体实施方式
12.以下,基于附图对本发明的一实施方式进行说明。
13.另外,本实施方式中的x轴、y轴、z轴为分别正交的关系,x轴以及y轴为规定平面内的轴,z轴为与所述规定平面正交的轴。而且,在本实施方式中,以从与y轴平行的图1a的跟前方向观察的情况为基准,在表示方向的情况下,“上”为z轴的箭头方向,“下”为其相反方向,“左”为x轴的箭头方向,“右”为其相反方向,“前”为y轴的箭头方向,“后”为其相反方向。
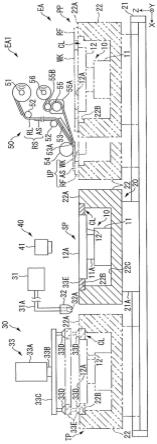
14.本发明的支承装置ea具备:第一支承单元10,其用第一支承面12a支承作为第一支承对象物的被粘体wk;第二支承单元20,其具有设于从第一支承面12a隔开间隙cl的位置的第二支承面22a,利用该第二支承面22a支承第二支承对象物、并且是作为框架部件的环形框架rf;异物去除单元30,其跨越第一支承面12a以及第二支承面22a地进行吸引,从这些第
一支承面12a上以及第二支承面22a上去除异物;以及对第一支承面12a上以及第二支承面22a上的异物进行感测的异物感测单元40,所述支承装置ea与将粘合片材as粘附于被粘体wk以及环形框架rf的粘附单元50构成了片材粘附装置ea1。
15.第一支承单元10具备:作为驱动设备的直线运动马达11;以及内侧台12,支承于直线运动马达11的输出轴11a,具有能够由减压泵、真空喷射器等未图示的减压单元(保持单元)吸附保持的第一支承面12a。
16.第二支承单元20具备:作为驱动设备的线性马达21;以及外侧台22,支承于线性马达21的滑动件21a,具有能够由减压泵、真空喷射器等未图示的减压单元(保持单元)吸附保持的第二支承面22a。
17.在外侧台22形成有凹部22c,该凹部22c利用底面支承直线运动马达11,且在上方形成有台阶部22b。
18.异物去除单元30具备:减压泵、真空喷射器等减压单元31;吸引喷嘴32,经由配管31a连接于减压单元31,形成有跨越第一、第二支承面12a、22a的长度的吸引口32a;以及将间隙cl封堵的封堵单元33,所述异物去除单元30成为基于异物感测单元40的感测结果进行吸引的构成。
19.封堵单元33具备:作为驱动设备的直线运动马达33a;吸附垫片33d,经由垫片框架33c支承于直线运动马达33a的输出轴33b,能够由减压泵、真空喷射器等未图示的减压单元(保持单元)吸附保持;以及封堵部件33e,载置于外侧台22的台阶部22b,能够相对于间隙cl插拔。
20.异物感测单元40具备相机、投影机等拍摄单元、光学传感器、超声波传感器等各种传感器等所构成的感测设备41。
21.粘附单元50具备:支承辊51,支承在剥离片材rl的一方的面临时粘接有粘合片材as的原料卷rs;引导原料卷rs的导辊52;作为剥离单元的剥离板53,在剥离缘53a折回剥离片材rl,从该剥离片材rl剥离粘合片材as;作为按压单元的按压辊54,将粘合片材as按压于被粘体wk并粘附;驱动辊55,支承于作为驱动设备的转动马达55a的未图示的输出轴,与夹送辊55b夹住剥离片材rl;以及作为回收单元的回收辊56,支承于未图示的驱动设备的输出轴,在进行片材粘附装置ea1的自动运转的期间,始终对存在于与夹送辊55b之间的剥离片材rl赋予规定的张力,回收该剥离片材rl。
22.对以上的片材粘附装置ea1的动作进行说明。
23.首先,对于在图1a中实线所示的初始位置配置有各部件的片材粘附装置ea1,由该片材粘附装置ea1的使用者(以下,简称为“使用者”)如该图那样设置原料卷rs之后,经由未图示的操作面板、个人计算机等操作单元输入自动运转开始的信号。于是,粘附单元50驱动转动马达55a,送出原料卷rs,前头的粘合片材as的送出方向前端部在剥离板53的剥离缘53a被剥离规定长度的话,则停止转动马达55a的驱动。
24.接着,第二支承单元20以及异物去除单元30驱动线性马达21以及减压单元31,一边进行吸引喷嘴32的吸引,一边使外侧台22向左方移动,如图1a中双点划线所示,若外侧台22到达封堵部件33e位于吸附垫片33d的正下方的插拔位置tp,则停止线性马达21以及减压单元31的驱动。由此,即使第一、第二支承面12a、22a上有异物,也会在该第一、第二支承面12a、22a通过吸引喷嘴32的下方的过程中去除该异物。此时,由于在间隙cl中插入有封堵部
件33e,因此来自该间隙cl的空气的流入量不会变多,可充分地确保吸引第一、第二支承面12a、22a的吸引力(参照图1b)。之后,异物去除单元30驱动直线运动马达33a以及未图示的减压单元,使吸附垫片33d下降而将封堵部件33e吸附保持之后,使该吸附垫片33d回位到初始位置,如图1a中双点划线所示,将插入于间隙cl的封堵部件33e拔出(之后将该动作称作“拔出动作”)。接下来,第二支承单元20驱动线性马达21,使外侧台22向右方移动,如图1a中双点划线所示,若外侧台22到达第一、第二支承面12a、22a位于粘附单元50的右下方的载置位置pp,则停止线性马达21的驱动。
25.然后,使用者或者多关节机器人、带式输送机等未图示的输送单元如图1a中双点划线所示那样将被粘体wk以及环形框架rf载置于第一、第二支承面12a、22a上,则第一、第二支承单元10、20驱动各自的未图示的减压单元,开始第一、第二支承面12a、22a上的被粘体wk、环形框架rf的吸附保持。接着,第一支承单元10驱动直线运动马达11,使内侧台12升降以使被粘体wk的上表面与环形框架rf的上表面位于同一平面。之后,第二支承单元20驱动线性马达21,使外侧台22向左方移动,若该外侧台22到达规定的位置,则粘附单元50驱动转动马达55a,配合于外侧台22的移动速度地送出原料卷rs。由此,粘合片材as被从剥离片材rl剥离,该从剥离片材rl剥离的粘合片材as如图1a中双点划线所示,由按压辊54按压粘附于环形框架rf以及被粘体wk。接下来,前头的粘合片材as整体粘贴于环形框架rf以及被粘体wk而形成一体物up,接着该先头的粘合片材as的下一粘合片材as的送出方向前端部在剥离板53的剥离缘53a被剥离规定长度的话,则粘附单元50停止转动马达55a的驱动。
26.然后,若外侧台22到达该外侧台22的初始位置即异物感测单元40的感测位置sp,则第二支承单元20停止线性马达21的驱动,之后,第一、第二支承单元10、20停止各自的未图示的减压单元的驱动,解除第一、第二支承面12a、22a上的被粘体wk、环形框架rf的吸附保持。接着,若使用者或者未图示的输送单元将一体物up输送到下一工序,则异物感测单元40驱动感测设备41,开始第一、第二支承面12a、22a上的异物的感测。感测设备41的感测的结果,若异物感测单元40识别为在第一、第二支承面12a、22a上没有异物,则第二支承单元20驱动线性马达21,使外侧台22移动到载置位置pp,之后重复上述相同的动作。
27.另一方面,感测设备41的感测的结果,若异物感测单元40识别为第一、第二支承面12a、22a上有异物,则第一支承单元10以及第二支承单元20驱动直线运动马达11以及线性马达21,使内侧台12回位到初始位置,并且使外侧台22移动到插拔位置tp,停止线性马达21的驱动。之后,异物去除单元30驱动直线运动马达33a,使吸附垫片33d下降而在将封堵部件33e插入间隙cl中的时刻,停止未图示的减压单元的驱动,解除吸附垫片33d的封堵部件33e的吸附保持,之后,将直线运动马达33a驱动,使吸附垫片33d回位到初始位置。接下来,第二支承单元20以及异物去除单元30驱动线性马达21以及减压单元31,一边进行吸引喷嘴32的吸引,一边使外侧台22移动到感测位置sp,之后再次使外侧台22向插拔位置tp返回,停止线性马达21以及减压单元31的驱动。由此,曾经存在于第一、第二支承面12a、22a上的异物在该第一、第二支承面12a、22a通过吸引喷嘴32的下方的过程中被去除。此时,也由于在间隙cl中插入有封堵部件33e,因此可充分地确保吸引第一、第二支承面12a、22a的吸引力。然后,在进行异物去除单元30的拔出动作之后,第二支承单元20驱动线性马达21,使外侧台22移动到载置位置pp,之后重复上述相同的动作。
28.根据以上那样的实施方式,由于封堵间隙cl,因此可充分地确保吸引第一、第二支
承面12a、22a的吸引力,能够可靠地从第一、第二支承面12a、22a上去除异物。
29.如以上那样,在上述记载中公开了用于实施本发明的最优选的构成、方法等,但本发明并不限定于此。即,本发明虽然主要对特定的实施方式进行了特别的图示并且进行了说明,但是本领域技术人员能够不脱离本发明的技术思想以及目的范围地对以上叙述的实施方式在形状、材质、数量、其他详细构成中加入各种变形。另外,上述公开的限定了形状、材质等的记载是为了使本发明容易理解而例示的记载,并非限定本发明,因此除去了它们的形状、材质等的限定的一部分或所有限定的部件的名称的记载包含在本发明中。
30.例如第一支承单元10也可以构成为,在第一支承面12a设置沿着其外缘的环状的台阶部,利用该台阶部支承封堵部件33e,也可以不使内侧台12升降以使被粘体wk的上表面与环形框架rf的上表面位于同一平面,也可以是内侧台12不经由直线运动马达11地支承于凹部22c的底面,也可以是内侧台12与外侧台22一体地形成,且在第一支承面12a与第二支承面22a之间形成有间隙cl,也可以不能由第一支承面12a吸附保持。
31.第二支承单元20也可以不形成台阶部22b地利用凹部22c的底面支承封堵部件33e,也可以是凹部22c贯通外侧台22,也可以不能由第二支承面22a吸附保持。
32.异物去除单元30如图1c所示,也可以采用利用作为支承于凹部22c的底面的驱动设备的直线运动马达33f的输出轴33g支承封堵部件33e、并利用直线运动马达33f使封堵部件33e上升而封堵间隙cl的构成,也可以将间隙cl整体封堵,也可以将间隙cl局部地封堵,也可以将尘埃、水分或者被粘体wk的碎片等作为异物而吸引,也可以不使外侧台22移动或者在移动的同时使吸引喷嘴32移动而在第一、第二支承面12a、22a上进行吸引,也可以不使外侧台22以及吸引喷嘴32这两方移动而是将第一、第二支承面12a、22a上一并吸引,也可以不基于异物感测单元40的感测结果地进行吸引,例如也可以在将一体物up输送到下一工序之后,每次都在第一、第二支承面12a、22a上进行吸引,也可以在将5个、10个等这种规定数量的一体物up输送到下一工序之后,在第一、第二支承面12a、22a上进行吸引,也可以在经过5分钟、30分钟等这种规定时间的时刻在第一、第二支承面12a、22a上进行吸引,也可以采用将封堵部件33e固定于内侧台12、外侧台22的封堵部件固定单元。
33.封堵部件33e的材质、种类、形状等不被特别限定,例如可以是金属、树脂、塑料、玻璃等任意的材质,也可以是布、膜等片材部件,也可以是圆形、椭圆形、三角形、四边形等多边形、其他形状。
34.异物感测单元40也可以不使内侧台12、外侧台22移动或者在移动的同时使感测设备41移动或者不移动,进而感测第一、第二支承面12a、22a上的异物,也可以仅感测第一支承面12a上的异物,也可以仅感测第二支承面22a上的异物,也可以配备在本发明的支承装置ea、片材粘附装置ea1中或者不配备在其中。
35.粘附单元50也可以通过在临时粘接于剥离片材rl的带状的粘合片材基材形成闭环状或者短尺寸的整个宽度方向上的切口,送出由该切口分隔的规定的区域被作为粘合片材as的原料卷,也可以采用带状的粘合片材基材临时粘接于剥离片材rl的原料卷,利用切割刀等切断单元在粘合片材基材形成闭环状或者短尺寸的整个宽度方向上的切口,并将由该切口分隔的规定的区域作为粘合片材as,也可以取代支承辊51、导辊52等各辊而利用板状部件、轴部件等支承、引导原料卷rs、剥离片材rl,也可以不将原料卷卷绕而是例如采用折子式(fanfold)折叠来支承,也可以不将剥离片材rl卷绕而是采用折子式折叠,或利用粉
碎机等切断单元切碎,或简单地堆积,进而采用将剥离片材rl回收的回收单元,也可以不采用回收单元,也可以配备于本发明的支承装置ea、片材粘附装置ea1中,也可以不配备于其中。
36.框架部件除了环形框架rf以外,也可以不是环状(外周不相连)、或者圆形、椭圆形、多边形、其他形状。
37.粘合片材as、第一支承对象物以及第二支承对象物的材质、种类、形状等不被特别限定。例如粘合片材as以及第一、第二支承对象物也可以是圆形、椭圆形、三角形、四边形等多边形、其他形状,粘合片材as也可以是压敏粘合性、热敏粘合性等粘合方式,在采用了热敏粘合性的情况下,通过设置加热符合的片材的适当的线圈加热器、导热管的加热侧等加热单元的适当方法来粘合即可。另外,这种粘合片材as例如可以是仅有粘合剂层的单层、在基材与粘合剂层之间具有中间层、在基材的上表面具有覆盖层等3层以上、进而是能够从粘合剂层剥离基材的所谓双面粘合片材,两面粘合片材可以是具有单层或者多层的中间层的片材,也可以是没有中间层的单层或者多层的片材。另外,作为第一、第二支承对象物,例如可以是食品、树脂容器、硅半导体晶圆、化合物半导体晶圆等半导体晶圆、电路基板、光盘等信息记录基板、玻璃板、钢板、陶器、木板或者树脂等单体物,也可以是由它们中的两个以上形成的复合物,可以采用任意方式的部件、物品等对象。另外,粘合片材as取代功能性、用途性的读法,例如也可以是信息记载用标签、装饰用标签、保护片材、切割带、芯片贴装膜、芯片接合带、记录层形成树脂片材等任意的片材、膜、带等。
38.本发明中的单元以及工序只要能够实现对这些单元以及工序说明的动作、功能或者工序,就没有任何限定,而且,完全不限定于所述实施方式中所示的单纯的一个实施方式的构成物、工序。例如第一支承单元只要能够用第一支承面支承第一支承对象物就可以是任意的支承单元,只要是符合申请当初的技术常识而在其技术范围内,就不被限定(对于其他单元以及工序也相同)。
39.所述实施方式中的驱动设备可以采用转动马达、直线运动马达、线性马达、单轴机器人、具备2轴或者3轴以上的关节的多关节机器人等电动设备、气缸、液压缸、无杆缸以及旋转缸等促动器等,还可以将它们直接或者间接地组合来采用。
40.在所述实施方式中,在采用了辊等旋转部件的情况下,也可以具备使该旋转部件旋转驱动的驱动设备,也可以由橡胶、树脂等能够变形的部件构成旋转部件的表面、旋转部件自身,也可以由不变形的部件构成旋转部件的表面、旋转部件自身,也可以取代辊而采用旋转或者不旋转的轴、刮板等其他部件,在采用了按压辊、按压头等按压单元、按压部件这种按压被按压物的物体的情况下,也可以取代上述的例示或者与其一并采用辊、圆棒、刮板材料、刷状部件、还有吹送大气、天然气等气体的物体,也可以由橡胶、树脂、海绵等能够变形的部件构成进行按压的物体,也可以由金属、树脂等不变形的部件来构成,在采用了剥离板、剥离辊等剥离单元、剥离部件这种将被剥离物剥离的物体的情况下,也可以取代上述的例示或者与其一并采用板状部件、圆棒、辊等部件,也可以由橡胶、树脂等能够变形的部件构成进行剥离的物体,也可以由不变形的部件构成,在采用了支承(保持)单元、支承(保持)部件等支承(保持)被支承部件(被保持部件)的物体的情况下,也可以采用利用机械卡盘、夹紧气缸等把持单元、库仑力、粘合剂(粘合片材、粘合带)、粘着剂(粘着片材、粘着胶带)、磁力、伯努利吸附、吸引吸附、驱动设备等支承(保持)的被支承部件构成,在采用了切断单
元、切断部件等将被切断部件切断或者在被切断部件形成切口、切断线的物体的情况下,也可以取代上述的例示或者与其一并采用切割刀、切割器、离子束、火力、热、水压、电热线、通过气体、液体等的吹送等来进行切断的物体,或使用来进行切断的适当的驱动设备的组合移动并切断。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
