1.本发明涉及图像处理技术领域,特别涉及一种激光线扫图像处理方法。
背景技术:
2.轮胎上的字符携带着产品信息,对轮胎生产厂家而言非常重要[1]。然而,对轮胎表面字符的精准识别却是一大难题。人工检测法判断标准因人而异,不同个体检测结果可能不一样。而且,长时间工作容易造成人员视觉疲劳,检测效率和可靠性将大大下降[2]。近年来,随着人工智能的发展,机器视觉越来越多地应用于工业检测,激光线扫轮胎表面字符识别作为机器视觉应用的一种,现已广泛应用于各行各业的工业检测中。但由于激光线扫相机在扫描过程中存在噪声、扫描范围限制导致成像图片成像不均;操作台旋转导致的轮胎成像图片弯曲偏心;轮胎侧面中间鼓两边低导致成像图片中间亮、两边暗的现象;操作台旋转不在一个面上导致成像整体亮暗相间等,这都严重得干扰了字符的精准识别,大大降低了机器视觉在工业检测中的准确率。因此发明一种精准的激光线扫轮胎侧面偏心成像矫正处理方法显得尤为重要。
[0003]
[1] 陈裕潮. 一种基于机器视觉的轮胎模具字符检测方法[j]. 广东工业大学,2016。
[0004]
[2] 阮宇静. 一种基于机器视觉的轮胎胎面检测系统[d]. 杭州电子科技大学,2017。
技术实现要素:
[0005]
针对现有技术中存在的不足,本发明提供了一种激光线扫轮胎侧面偏心成像矫正处理方法,能有效提升轮胎侧面激光线扫图像的对比度,尤其是文字预取的对比度和背景一致性,解决了轮胎旋转时偏心导致成像图片弯曲的问题,为轮胎表面的字符识别提供高质量的预处理结果本。
[0006]
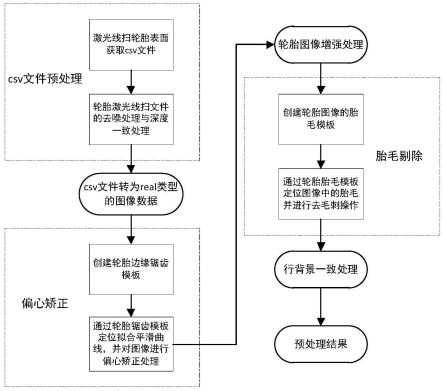
本发明的目的是这样实现的:一种激光线扫轮胎侧面偏心成像矫正处理方法,包括以下步骤:s1使用激光扫描仪获取轮胎信息,得到csv文件,文件中各点为深度值;s2对csv文件进行去噪预处理及深度一致预处理,将csv文件转为real数据的图像;s3创建轮胎边缘锯齿模板;s4通过轮胎锯齿模板定位拟合平滑曲线,并对图像进行偏心矫正处理;s5轮胎图像增强处理;s6创建轮胎图像的胎毛模板;s7通过模板匹配法,定位图像中的胎毛并进行去毛刺操作;s8采用行背景一致的处理方法,分段处理文字区域。
[0007]
作为本发明的进一步限定,步骤2具体为:
将csv文件中的无效点,即数值在10-9
以下,将其置0后剔除,找出csv文件中剩余值中的最深值max和最浅值min;根据噪声占比,对min和max周围区域分别设为0.01%和0.001%,通过设置步长为0.05μm,以深度值为横坐标,min为起点,max为终点,像素个数为纵坐标,画出深度直方图,计像素点个数为s,从横坐标两端点min和max分别通过累加到s
×
0.01%和s
×
0.001%的像素点个数,可以得到两个阈值threshmin和threshmax,将csv文件中深度值小于threshmin的均置为threshmin,对大于threshmax的均置为threshmax,通过转化,完成深度范围统一,并将csv文件转为real类型的图像。此步骤解决了轮胎侧面扫描成像时中间高两边低所导致深度不均的问题。
[0008]
作为本发明的进一步限定,步骤4具体为:利用创建的轮胎锯齿边缘模板,匹配定位得到每一个轮胎锯齿坐标之后拟合一条平滑曲线,之后用拟合的平滑曲线与第一个锯齿点相交得到标准行差row_ref;之后在每一个交叉点处计算平滑曲线与锯齿交叉点的行坐标row;若row》row_ref,则通过row-row_ref得到调整值row_adjust,再通过row-row_adjust进行校正;若row《row_ref,则通过row_ref-row得到调整值row_adjust,再通过row row_adjust进行校正,设置校正后像素点的灰度值,反复执行此操作直到完成所有该行所有像素点的校正。此步骤解决了轮胎在扫描时旋转偏心导致成像不齐的问题。
[0009]
作为本发明的进一步限定,步骤5具体为:在halcon软件中,以图像的每一行的像素作为处理对象,通过min_max_gray算子剔除0.01%的最大最小灰度值得到其余部分的最小灰度值minlow;再剔除0.02%的最大最小灰度值得到其余部分的最小灰度值minhigh;将背景灰度值row_bkg_val设为两最小灰度值的平均值,再将每一行像素的灰度值减去row_bkg_val直至所有行完成此操作。此步骤极大的增强了轮胎背景与字符的对比度,便于后续处理操作。
[0010]
作为本发明的进一步限定,步骤7具体为:根据建立的胎毛模板,匹配定位轮胎图像中的胎毛以及其阴影区域,剔除这些胎毛及其阴影区域的原图像信息,用其周围像素点取均值填补。此步骤剔除了胎毛对轮胎字符的干扰,提供了清晰的图像背景。
[0011]
作为本发明的进一步限定,步骤8具体为:通过模板匹配定位到要识别的字符区域,生成矩形区域之后通过min_max_gray算子剔除5%的最大最小灰度值的干扰,根据灰度直方图选择,在剩下的轮胎图像区域中得到最小灰度值minbkg;之后将原图像中的所有灰度值统一减去minbkg,对区域内灰度值小于minbkg的像素点置0重复此操作,完成区域内所有行的背景一致性处理。此步骤提升了特定区域内背景与字符本身的对比度,有效的提升了轮胎表面字符识别的精确率。
[0012]
本发明首先通过激光扫描仪得到轮胎侧面的反射信息csv文件,剔除csv文件中的无效点,并找出文件中的最深值max和最浅值min;通过深度直方图,累加到噪声占比的像素个数,得到阈值threshmin和threshmax后对csv文件进行阈值处理,完成深度一致处理;其次创建轮胎边缘锯齿模板,匹配定位拟合平滑曲线,再选取第一个锯齿点作为参考坐标,对图像进行偏心矫正处理;之后利用min_max_gray得到每一行像素的平均背景值,对每一行像素点进行增强处理;再创建轮胎图像的胎毛模板定位胎毛位置后进行去毛刺操作;最后
通过模板匹配定位到文字区域,利用min_max_gray算子得到最小灰度值minbkg,将区域内灰度值减去minbkg完成行背景一致处理。
[0013]
与现有技术相比,本发明的有益效果在于:针对激光线扫相机工作中出现的噪声和轮胎表面弯曲造成的成像不均;轮胎旋转时偏心导致成像图片弯曲等问题,提出了一种适用于轮胎表面字符识别的激光线扫图像预处理方法。本发明能有效提升轮胎表面激光线扫图像的对比度,尤其是文字区域的对比度和背景一致性,解决了轮胎旋转时偏心导致成像图片弯曲的问题,为轮胎表面的字符识别提供高质量的预处理结果。
附图说明
[0014]
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据提供的附图获得其他的附图。
[0015]
图1为本发明流程图。
[0016]
图2为本发明中csv文件深度一致处理后转real数据的图像示意图。
[0017]
图3为本发明中轮胎边缘锯齿拟合矫正示意图。
[0018]
图4为本发明中偏心矫正效果示意图。
[0019]
图5为本发明中图像增强效果示意图。
[0020]
图6为本发明中胎毛图像剔除效果示意图。
[0021]
图7为本发明中行背景一致效果示意图。
具体实施方式
[0022]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0023]
如图1所示,一种激光线扫轮胎侧面偏心成像矫正处理方法,包括以下步骤。
[0024]
步骤1:使用激光扫描仪获取轮胎信息。
[0025]
步骤2轮胎激光线扫文件的去噪预处理及深度一致预处理,具体为:将csv文件(csv文件为激光扫描仪扫描轮胎的反射信息,文件中各点为深度值)中的无效点(数值在10-9
及以下),将其置0后剔除,找出csv文件中剩余值中的最深值max和最浅值min;根据噪声占比,对min和max周围区域分别设为0.01%和0.001%,通过设置步长为0.05微米,以深度值为横坐标,min为起点,max为终点,像素个数为纵坐标,画出深度直方图。计像素点个数为s,从横坐标两端点min和max分别通过累加到s
×
0.01%和s
×
0.001%的像素点个数,可以得到两个阈值threshmin和threshmax,将csv文件中深度值小于threshmin的均置为threshmin,对大于threshmax的均置为threshmax,通过转化,完成深度范围统一,并将csv文件转为real类型的图像,如附图2所示。
[0026]
步骤3创建轮胎边缘锯齿模板,具体为:在halcon软件中选定轮胎边缘锯齿区域,
并创建图像模板。
[0027]
步骤4通过轮胎锯齿模板定位拟合平滑曲线,并对图像进行偏心矫正处理,具体为:利用创建的轮胎锯齿边缘模板,匹配定位得到每一个轮胎锯齿坐标之后拟合一条平滑曲线。之后用拟合的平滑曲线与第一个锯齿点相交得到标准行差row_ref;之后在每一个交叉点处计算平滑曲线与锯齿交叉点的行坐标row;若row》row_ref,则通过row-row_ref得到调整值row_adjust,再通过row-row_adjust进行校正;若row《row_ref,则通过row_ref-row得到调整值row_adjust,再通过row row_adjust进行校正,设置校正后像素点的灰度值,反复执行此操作直到完成所有该行所有像素点的校正,如附图3、4所示。
[0028]
步骤5轮胎图像增强处理,具体为:以图像的每一行的像素作为处理对象,通过min_max_gray算子剔除0.01%的最大最小灰度值得到其余部分的最小灰度值minlow;再剔除0.02%的最大最小灰度值得到其余部分的最小灰度值minhigh;将背景灰度值row_bkg_val设为两最小灰度值的平均值,再将每一行像素的灰度值减去row_bkg_val直至所有行完成此操作,如附图5所示。
[0029]
步骤6建轮胎图像的胎毛模板,具体为:在halcon中创建胎毛部分及阴影区域的灰度图像模板。
[0030]
步骤7通过模板匹配法,定位图像中的胎毛并进行去毛刺操作,具体为:根据建立的胎毛模板,匹配定位轮胎图像中的胎毛以及其阴影区域,剔除这些胎毛及其阴影区域的原图像信息,用其周围像素点取均值填补,如附图6所示。
[0031]
步骤8采用行背景一致的处理方法,分段处理文字区域,具体为:通过模板匹配定位到要识别的字符区域,生成矩形区域之后通过min_max_gray算子剔除5%(根据灰度直方图选择)的最大最小灰度值的干扰,在剩下的区域(轮胎图像)中得到最小灰度值minbkg;之后将原图像中的所有灰度值统一减去minbkg,对区域内灰度值小于minbkg的像素点置0重复此操作,完成区域内所有行的背景一致性处理。
[0032]
如附图7所示,最终处理后的图像解决了轮胎在线扫成像时的偏心问题和灰度不均匀问题,且消除了轮胎胎毛的干扰,图像字符区域比度高,极大的提升了字符识别的准确率。
[0033]
以上实施例的说明只是用于帮助理解本发明的方法及其核心思想。应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以对本发明进行若干改进和修饰,这些改进和修饰也落入本发明权利要求的保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。