1.本发明涉及一种清洁机器人,还涉及一种清洁机器人及控制方法。
背景技术:
2.随着用户需求的更多样化,清洁机器人种类繁多,清洁机器人能对地面进行擦拭处理,从而提高地面清洁度。
3.现有的清洁机器人进行清洁工作时可以采用拖布进行拖地作业,具体是将拖布连接在拖地板上或者是机器本体上,通过浸湿的拖布清洁地面。对拖布供水时,大都采用自然供水的方法,即,让水箱中的水按照一定的速率自然流至拖布上浸湿拖布。然而,当清洁机器人遇到没电或卡死等情况时,水箱的不间断供水会导致拖布泡坏或者地面产生大量积水,泡坏地板。
4.因此,用户需要自己看管机器人,以帮助机器人处理没电或卡死的情况。对于用户而言,这样人为参与的工作会降低机器人的自动化操作体验。
技术实现要素:
5.为克服现有技术的缺陷,本发明所要解决的问题是提供一种能自主控制向擦拭件传送液体情况的清洁机器人。
6.本发明解决现有技术问题所采用的技术方案是:一种清洁机器人,清洁机器人可以在工作区域中行走并工作,清洁机器人可以包括:机身;行走机构,支撑机身并带动清洁机器人行走;动力模块,为清洁机器人提供行走及工作的驱动力;拖地模块,可以用于安装在机身上,执行预定拖地工作,拖地模块上能安装擦拭件;控制模块,电性连接并且控制动力模块,以实现清洁机器人的自动行走及自动工作;清洁机器人还可以包括:与控制模块电性连接的供液装置,控制模块能基于当前拖地情况控制供液装置向拖地模块传送液体。
7.优选的,当检测到清洁机器人当前处于,但不限于以下至少之一的拖地情况时,控制模块控制供液装置停止向拖地模块传送液体,可以包括:清洁机器人在工作过程中被障碍物困住、清洁机器人回归基站更换拖地模块、清洁机器人处于更换拖地模块的状态、清洁机器人处于待机状态。
8.优选的,清洁机器人还可以包括:抬升机构,控制模块能控制抬升机构使得拖地模块从执行拖地工作的拖地高度抬升至其他高度,当抬升机构当前处于抬升的拖地情况时,控制模块控制供液装置停止向拖地模块传送液体。
9.优选的,清洁机器人还可以包括:与控制模块电性连接的拖布检测装置,拖布检测装置可以用于检测擦拭件是否安装于清洁机器人上,当拖布检测装置检测到当前擦拭件未安装在清洁机器人上的拖地情况时,控制模块控制供液装置停止向拖地模块传送液体。
10.优选的,清洁机器人还可以包括:湿度检测装置,通过湿度检测装置检测到的当前拖地情况控制供液装置向拖地模块传送液体。
11.优选的,清洁机器人还可以包括信号发送装置,信号发送装置将湿度检测装置检
测到的拖地情况发送给用户。
12.优选的,湿度检测装置可以包括:拖布湿度传感器,控制模块基于拖布湿度传感器检测到的擦拭件湿度,控制供液装置向拖地模块传送液体。
13.优选的,拖布湿度传感器安装在机身的下方。
14.优选的,湿度检测装置可以包括:环境湿度检测装置,通过环境湿度检测装置检测到的环境湿度,控制供液装置向拖地模块传送液体。
15.优选的,环境湿度检测装置可以基于清洁机器人本地和/或远程方式检测到的环境湿度控制供液装置向拖地模块传送液体。
16.优选的,湿度检测装置可以包括:地面湿度传感器,控制模块基于地面湿度传感器检测到的地面湿度,控制供液装置向拖地模块传送液体。
17.优选的,清洁机器人还可以包括:地面传感器,控制模块基于地面传感器当前检测到的地面状态,控制供液装置向拖地模块传送液体,地面状态包括:地面材料。
18.优选的,清洁机器人还可以包括:导航机构,用于形成清洁机器人的工作区域地图,控制模块基于工作区域地图中标定当前的拖地情况,控制供液装置向拖地模块传送液体。
19.优选的,导航机构包括但不限于以下至少之一:超声波传感器、光学传感器、uwb传感器、惯性导航系统。
20.优选的,控制模块可以基于来自用户的指令控制供液装置向拖地模块传送液体。
21.优选的,供液装置可以包括:液体储存器。
22.优选的,供液装置还可以包括:与控制模块电性连接的液体传送装置,液体传送装置与液体储存器相连,控制模块基于当前拖地情况控制液体传送装置将液体储存器中的液体传送给拖地模块。
23.优选的,清洁机器人还可以包括:设置于液体储存器中的液面监测装置,所液面监测装置用于监测液体储存器中的液面。
24.优选的,清洁机器人还可以包括信号发送装置,信号发送装置在液面监测装置监测到液体储存器中的液面低于预设阈值时,向用户发送清洁机器人中液体量不足的通知消息。
25.优选的,清洁机器人还可以包括:指示装置,指示装置用于指示清洁机器人液体量是否充足。
26.优选的,清洁机器人还可以包括至少两个液体储存器、分别与至少两个液体储存器相连的至少两个液体传送装置,控制模块用于控制至少两个液体传送装置基于当前拖地情况将至少两个液体储存器中的液体传送给拖地模块,至少两个液体储存器中存储的液体类型不同。
27.优选的,清洁机器人还包括与至少两个液体传送装置相关联的阀门,阀门在控制模块的控制下开启和关闭,从而基于当前拖地情况控制供液装置向拖地模块传送液体。
28.优选的,清洁机器人还可以包括:地面传感器,控制模块基于地面传感器当前检测到的地面状态,控制至少两个液体储存器中各个液体储存器传送的液体量以及液体类型,地面状态包括:地面材料和/或地面污渍类型。
29.优选的,清洁机器人还可以包括:导航机构,用于形成清洁机器人的工作区域地
图,控制模块基于工作区域地图中标定的当前拖地情况,控制供液装置向拖地模块传送的液体量以及液体类型。
30.优选的,清洁机器人还可以包括:能量模块,用于为清洁机器人的行走及工作提供能量。
31.优选的,清洁机器人可以是家用和/或室内服务机器人。
32.本发明实施例还提供了一种清洁机器人控制方法,该方法可以包括:控制清洁机器人进入工作状态;基于当前拖地情况判断供液装置是否需要向拖地模块传送液体;若是,则控制供液装置向拖地模块传送液体,清洁机器人包括供液装置。
33.优选的,工作状态可以包括:干拖或湿拖,相应的,在控制清洁机器人进入工作状态之后,该方法还可以包括:清洁机器人先对工作区域进行干拖,再对工作区域湿拖。
34.与现有技术相比,本发明的有益效果是:清洁机器人能更高效的完成拖地工作,减轻用户负担,提升清洁机器人的自动化程度及用户体验,清洁机器人能基于当前拖地情况智能的自主控制供液装置向擦拭件传送液体,从而能够延长用户家庭中地板等地面材料的使用寿命。
附图说明
35.以上所述的本发明的目的、技术方案以及有益效果可以通过下面附图实现:
36.图1是本发明一实施例的机器人清洁系统的示意图;
37.图2是本发明一实施例的清洁机器人主视图;
38.图3是本发明一实施例中的清洁机器人的功能模块示意图;
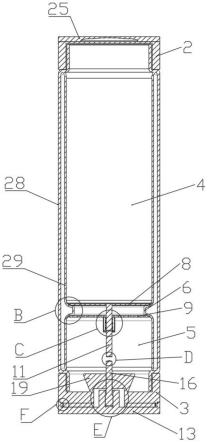
39.图4是本发明一实施例的清洁机器人仅存在单个液体存储器的结构图;
40.图5是本发明一实施例的清洁机器人双液体传送装置双液体储存器的结构图;
41.图6是本发明一实施例的清洁机器人单液体传送装置双液体储存器的结构图;
42.图7是本发明一实施例的清洁机器人供液装置的结构图。
具体实施方式
43.有关本发明的详细说明和技术内容,配合附图说明如下,然而所附附图仅提供参考与说明,并非用来对本发明加以限制。
44.如图1所示为本发明的机器人清洁系统的示意图。该机器人清洁系统300可以包括基站200和清洁机器人100,清洁机器人100可以是能自主更换擦拭件的装置。与之相对应的,清洁机器人100回归充电的基站200除了可以给清洁机器人100充电之外,还可以用于清洁机器人100更换擦拭件,将充电功能和更换擦拭件功能结合形成该清洁机器人的基站,从而可以节约用户空间。在清洁机器人100需要回归基站200的时候,如检测到擦拭件需要更换时或者清洁机器人100需要充电时,启动回归基站200程序,清洁机器人100回归基站200完成自动更换擦拭件和/或清洁机器人100的自动充电。在本技术的一个实施例中,所述擦拭件可以为拖布或海绵擦等用于擦拭工作表面(地面)的物品。值得注意的是,为了更清楚的描述本技术,在下文中均通过拖布来表示擦拭件。
45.基站200包括底板207,支撑板206和上板205,其中上板205通过支撑板206与底板207连接。上板205上设置有新拖布槽203、旧拖布槽204及拖布更换装置(图中未示出),拖布
更换装置可以采用升降机构,摆动机构等,且新拖布槽203和旧拖布槽204在底板207上的投影对应于清洁机器人100在底板207的第二操作位置202和第一操作位置201。可以理解的是,新旧拖布槽的位置不是固定的,如在其他实施例中,新旧拖布槽203、204的位置也是可以对换的。清洁机器人100在第一操作位置201完成旧拖布的卸载,并由基站200的拖布更换装置回收,且由基站200的拖布更换装置释放新的拖布,从而使清洁机器人100在第二操作位置201完成新拖布的装载。
46.在本技术的另一个实施例中,清洁机器人更换拖布的位置也可以和作为回归充电的位置分开单独设置,此时,当清洁机器人需要更换拖布时,可以回归更换拖布的位置更换拖布;当清洁机器人需要充电时,则可以回归充电位置充电,本技术对此不作限定,此时,回归更换拖布的位置可以为不固定的位置点。在本技术下文中,为了方便描述,除非特别说明,当描述清洁机器人回归基站更换拖布时,该回归的位置可以指的是将充电以及更换拖布两个功能结合在一起的基站,也可以指的是仅用于更换拖布的基站;相应的,当描述清洁机器人回归充电时,该回归的位置可以指的是将充电以及更换拖布两个功能结合在一起的基站,也可以指的是仅用于清洁机器人充电的基站。
47.在本实施例中,清洁机器人可以是家用和/或室内服务机器人。
48.如图2及图3所示,本技术的一个实施例中,清洁机器人100可以是拖地机器人,包括机身10、行走机构20、能量模块30、拖地模块40、动力模块80,控制模块60,还包括导航机构70。行走机构的行走元件包括主动轮21,用于带动清洁机器人100移动,可理解的是,行走元件也可以为履带结构。在本技术一实施例中,清洁机器人100还可以包括从动轮(图未示)。能量模块30可选择的被用于给清洁机器人供电,清洁机器人可选择的给能量模块30充电。动力模块80可以包括电机及与电机连接的传动结构,传动机构与行走机构连接,电机驱动传动机构工作,传动机构的传动作用使得行走机构运动,其中,传动机构可以是蜗轮蜗杆机构、锥齿轮机构等。动力模块80可以设有两组电机,一组电机驱动行走机构运动,另一组电机驱动拖地模块以一定的频率震动拖地;动力模块80也可以只设有一组用于驱动行走机构运动的电机,可理解的是,每组电机的数量不做限制,例如可以为一个或两个。拖地模块40可以用于安装在机身上执行预定的拖地工作,并且拖地模块40上能安装拖布,拖地模块40可以包括拖地板,拖布可拆卸的安装在拖地板上。导航机构70,可以包括但不限于以下至少之一:超声波传感器、雷达传感器、光学传感器(激光或红外传感器等)、uwb传感器、惯性导航系统等,用于提供环境控制数据,控制清洁机器人工作,并用于形成清洁机器人的工作区域地图。
49.在本技术另一个实施例中,清洁机器人100也可以是扫拖一体的清洁装置,此时清洁机器人除了拖地模块还可以包括扫地模块,扫地模块可以包括滚刷、边刷,用于清洁地面、墙角等的尘屑等杂物,通过边刷将杂物相对集中于滚刷处理,并将尘屑收集至集尘盒。
50.控制模块例如为控制器,可以是嵌入式数字信号处理器(digital signal processor,dsp)、微处理器(micro processor unit,mpu)、特定集成电路(application specific integrated circuit,asic)、可编程逻辑器件(programmable logic device,pld)芯上系统(system on chip,soc)、中央处理器(central processing unit,cpu)或者现场可编程门阵列(field programmable gate array,fpga)等。
51.控制器可根据预设程序或接受到的指令控制清洁机器人的工作。具体地,控制器
可以控制行走机构在清洁机器人的工作区域内按照预设的行走路径行走,在行走机构带动清洁机器人行走的同时,拖地模块执行拖地工作(可以包括:干拖或湿拖),清除工作区域内的尘屑等垃圾。进一步的,清洁机器人在预设路径内行走并完成拖地工作时,控制器可以控制清洁机器人停止拖地工作,并控制行走机构的行走,使得行走机构带动清洁机器人离开工作区域。清洁机器人的行走路径和停靠位置可以提前在控制器中设定,并由控制器控制行走机构执行。
52.图4所示为清洁机器人仅存在一个液体储存器的情况,清洁机器人还可以包括:与控制模块电性连接的供液装置,控制模块能基于当前拖地情况控制供液装置向拖地模块传送液体,从而清洁机器人能自主自动地控制其向拖布的供液情况,所传送的液体可以为水、加入精油的水、酒精等,本技术对此不作限定。如图4所示,该供液装置可以包括:液体储存器51、与控制模块电性连接的液体传送装置50,其中,该液体传送装置50与液体储存器51相连。在一个实施例中,控制模块可以通过程序控制供液装置向拖地模块传送液体,即可以基于当前拖地情况自动控制液体传送装置50将液体储存器51中的液体传送给拖地模块。在另一个实施例中,清洁机器人还可以包括与液体传送装置相关联的阀门,阀门在控制模块的控制下开启和关闭,从而可以基于当前拖地情况控制供液装置向拖地模块传送液体。
53.在本技术的一个实施例中,液体传送装置50可以为泵,可以包括但不限于蠕动泵、齿轮泵、柱塞泵以及隔膜泵等能执行液体传送功能的泵元件,控制模块通过控制泵元件中叶轮的转速控制液体储存器51向拖地模块传送的液体量。液体传送装置50和液体储存器51之间通过软管52相连,液体储存器51中的液体能通过软管52流向液体传送装置50,从而液体传送装置50可以将液体传送给拖地模块。在本技术的一个实施例中,液体传送装置50可以通过如图4所示的方式直接将液体传送至拖地模块40上,来达到将液体传送给拖地模块的目的。在本技术的另一个实施例中,液体传送装置50可以在清洁机器人的工作过程中,直接将液体喷洒至地面,从而清洁机器人在洒液的地面上行走实现湿拖,来达到将液体喷洒至地面溶解污渍,拖地更干净的目的。值得说明的是,本技术中所有实施例均可以应用上述两种方式实现将液体传送给拖地模块的目的。
54.如图7所示的本发明一实施例的清洁机器人供液装置的结构图,液体从液体传送装置50的出口管525流出之后,可以先经过雾化片526(本技术以采用3个雾化片为例)雾化,再将雾化后的液体传送给拖地模块。在本技术的另一个实施例中,液体从液体传送装置50的出口管流出之后,可以先经过海绵渗透,再利用雾化片雾化,再传送给拖地模块。在其他实施例中,也可以直接在液体储存器51后接入雾化片,然后传送给拖地模块。采用上述方式,供液装置中的液体能均匀地传送至拖地模块,保证拖布上能够均匀覆盖液体。
55.在本技术的一个实施例中,清洁机器人的默认工作模式为:先执行干拖工作后执行湿拖工作,即,用户启动清洁机器人进入工作状态时,清洁机器人可以先对工作区域进行干拖,再对工作区域进行湿拖。这样能够防止在用户未对工作区域进行吸尘的情况下,仅使用清洁机器人对工作区域进行湿拖时,容易将头发等垃圾粘到工作区域各处的缺陷。与清洁机器人的工作模式相对应,基站上放置有相应数目的干拖布以及湿拖布,或者,基站上仅放置干拖布,通过供液装置向拖地模块传送液体来实现湿拖的目的。当清洁机器人完成干拖之后,回归基站更换新的拖布,完成湿拖工作。
56.当然,在其他实施例中,用户也可以根据用户家中地面的实际污渍情况或者用户
自己的需求在app或者清洁机器机身上的人机交互中对该默认工作模式进行更改,比如将默认工作模式更改为:仅干拖、仅湿拖、先湿拖后干拖等情况。
57.清洁机器人的拖地模块在工作的过程中至少有三种高度状态:拖地高度、越障高度、卸载拖布高度,从而可以实现清洁机器人拖地、越障、自动更换拖布等需求。将这三个高度按照从高到低的顺序排列分别为:卸载拖布高度、越障高度、拖地高度,越障高度也可以和卸载拖布高度相同,在本技术中,越障高度并不仅仅是清洁机器人越障时拖地模块的高度,还可以指的是清洁机器人拖布处于抬升状态时的高度状态。当然,清洁机器人除了上述三个高度状态,还可以存在低于拖地高度的安装新拖布高度状态,此时卸载拖布高度可以用于旧拖布的卸载,安装新拖布高度可以用于新拖布的安装。
58.具体来说,当清洁机器人处于拖地的工作状态时,控制模块控制抬升机构使拖布处于拖地高度,此时,拖布与地面之间有一定的压力,拖布可以与地面接触且有一定的过盈量,从而达到较好的清洁效果;当清洁机器人在拖地过程中遇到障碍物时,抬升机构控制拖布处于越障高度,此时,拖布会自动抬升,越障高度高于工作状态高度,但高度不可高于卸载拖布高度,防止拖布及拖地板的脱落;当清洁机器人在拖地过程中需要回归更换拖布或者在拖地过程中电量低于预设阈值需要回归充电时,抬升机构控制拖布提升至越障高度返回,同时,清洁机器人还可以通过导航机构形成其回归之前所在位置坐标,并将该位置坐标在工作区域地图中标记;当更换拖布时,抬升机构控制拖布提升至卸载拖布高度,通过清洁机器人上固定安装的顶杆使得安装有拖布的拖地板克服磁力从清洁机器人上脱落,从而卸载旧拖布;卸载完旧拖布之后,清洁机器人会进行新拖布的自动安装,新拖布位于新拖布槽中,机器进入相应位置后,拖地板下降到安装新拖布高度即可通过磁力将新的拖布安装到清洁部件上,完成新拖布的安装;在安装完新拖布之后,抬升机构控制拖布提升至越障高度,并返回其在工作区域地图中标记的位置,在到达该标记的位置时,抬升机构控制拖布调整至拖地高度拖地继续拖地;当拖地过程中需要清洁机器人暂停拖地时,抬升机构控制拖布提升至越障高度。采用上述抬升机构控制拖布在越障时进行提升,解决了现有技术中清洁机器人的拖布在工作过程中仅存在拖地高度,由于越障高度几乎为0所导致的可清洁范围受限的缺陷。拖布可以在暂停拖地时控制抬升机构将拖布提升至越障高度,解决了现有技术中由于拖布处于拖地高度,地板泡在液体中导致地板损坏的缺陷。清洁机器人在更换完拖布之后还可以回归至更换拖布前的拖地位置进行断点续拖,解决了现有技术中对已拖区域重复拖地以及对未拖区域漏拖的缺陷,提高了清洁机器人的清洁效率。并且,拖布可以实现自动更换,提升了拖布机器人的自动化程度以及用户体验。
59.在本实施例中,当检测到清洁机器人处于下文中所述的拖地情况时,控制模块可以控制供液装置停止向拖地模块传送液体,从而达到保护清洁机器人、保护地板,并保证拖地效果的目的。
60.在本技术的一个实施例中,清洁机器人还可以包括与控制模块电性连接的拖布检测装置90,该拖布检测装置90用于在清洁机器人开始执行拖地工作之前,检测拖布是否安装于清洁机器人上,若为否,则控制模块控制液体传送装置停止向拖布传送液体;若拖布安装于清洁机器人上,则开始拖地工作。拖布与拖地板之间可以采用磁性连接的方式,因而,在该实施例中,拖布检测装置90可以是霍尔传感器。
61.在本技术的一个实施例中,当检测到清洁机器人当前处于以下至少之一的拖地情
况时,如:控制器出现故障;清洁机器人在拖地工作过程中被障碍物困住;清洁机器人处于待机暂停拖地工作状态;清洁机器人回归基站更换拖地模块的过程中以及清洁机器人处于更换拖地模块的状态;清洁机器人处于干拖模式;清洁机器人回归基站充电的过程中以及清洁机器人处于充电的状态;由于被用户抱起或遇到障碍物被抬起时,拖地机器人的全部或部分行走元件离开地面等情况时,控制模块可以控制供液装置停止向拖地模块传送液体。
62.在本技术的一个实施例中,清洁机器人还可以包括:抬升机构,控制模块能控制抬升机构使得拖地模块从执行拖地工作的拖地高度抬升至其他高度,当抬升机构当前处于抬升的拖地情况时,控制模块控制供液装置停止向拖地模块传送液体,从而可以避免携带有湿拖布的清洁机器人处于非工作状态时,由于自然供水所导致的地板损伤以及大面积水,保护地板并保证拖地效果。
63.在本实施例中,清洁机器人能根据所设置下文中的至少一个传感器检测到的当前拖地情况控制供液装置向拖地模块传送的液体,从而保证拖地效果。
64.在本技术的实施例中,该清洁机器人还可以包括:湿度检测装置,通过湿度检测装置检测到的当前拖地情况控制供液装置向拖地模块传送液体。所述当前拖地情况可以包括但不限于以下至少之一:拖布湿度、地面湿度、环境湿度等。具体的应用场景如下文所述。
65.在一个实施例中,湿度检测装置可以包括:拖布湿度传感器,控制模块基于拖布湿度传感器检测到的拖布湿度控制供液装置传送的液体。优选的,该拖布湿度传感器可以安装在机身下方,例如:电容传感器和/或电流传感器。通过拖布湿度传感器检测到的拖布湿度监控当前拖地情况,并将该拖布湿度发送给控制模块,控制模块基于拖布湿度传感器检测到的拖布湿度,控制液体传送装置传送的液体量。具体的,当拖布湿度大于预设阈值时,控制液体传送装置以低于当前出液速率的速率输出液体;反之,当拖布湿度小于预设阈值时,控制液体传送装置以高于当前出液速率的速率输出液体。该预设阈值可以是用户根据当前地面情况设置的,不同区域的预设阈值可以是不相同的。
66.在另一个实施例中,湿度检测装置可以包括:环境湿度检测装置,可以通过环境湿度检测装置检测到的环境湿度情况控制供液装置传送的液体。其中,该环境湿度检测装置可以基于本地和/或远程方式检测到的环境湿度控制供液装置传送的液体。该环境湿度检测装置可以为安装在清洁机器人上的空气湿度传感器或湿度测量仪,该空气湿度传感器或湿度测量仪可以安装在和清洁机器人水源满足一定距离的位置处,从而避免清洁机器人中的液体影响环境湿度检测装置的测量结果,便于更加准确的检测清洁机器人所处环境湿度,从而基于检测到得环境湿度控制供液装置传送的液体。清洁机器人也可以采用远程的方式检测环境湿度。此时清洁机器人采用蜂窝或者wifi等方式接入网络,清洁机器人接收服务器端发送的天气情况,基于该天气情况控制液体传送装置传送的液体量。当环境湿度大于预设阈值时,控制液体传送装置以低于当前出液速率的速率输出液体;反之,当环境湿度小于预设阈值时,控制液体传送装置以高于当前出液速率的速率输出液体。该预设阈值可以是用户根据当前地面情况设置的,不同区域的预设阈值可以是不相同的。
67.在另一个实施例中,湿度检测装置可以包括:地面湿度传感器,例如:视觉传感器和/或雷达传感器,控制模块可以基于地面湿度传感器检测到的地面湿度,控制供液装置传送的液体,并可以根据检测到的地面湿度实时更新拖地app中该区域的湿度值。地面湿度传
感器能基于检测到的地面湿度情况或干燥程度控制供液装置传送的液体。通常情况下,清洁机器人可以按照预先设定的行走路径进行拖地。然而,对于某些区域而言,当清洁机器人检测到该区域地面较干时,可以多喷液或者增加清洁机器人的工作时间,直至地面传感器检测到的地面状态满足预设的清洁要求时,清洁机器人停止对此区域的清洁工作;或者当检测到某些区域地面较湿润时,液体传输装置可以减少传输的液体量或者停止传输的液体量。例如:当清洁机器人短时间内经过相同区域时,可以控制液体传输装置减少或者停止供液,这样可以避免浪费液体或者避免机器人在行走的过程中轮子发生打滑的现象。在一个具体的应用场景中,当机器人在某些区域拖完地后,转向又重复行走至这些区域中的部分位置时,若继续供液则会导致地面上有过多液体造成机器打滑或者浪费液体,因而当检测到机器人在短时间内重复在相同区域行走时,可以控制液体传输装置停止供液。
68.在本技术的一个实施例中,该清洁机器人还可以包括:地面传感器,例如:视觉传感器和/或雷达传感器,通过地面传感器检测到的地面状态,并将该地面状态发送给控制模块,从而控制模块能控制供液装置传送的液体。具体的,地面状态可以包括:地面材料等。地面传感器可以检测工作表面的材料,例如为地板或者瓷砖等情况,控制模块可以根据地面传感器检测到的地面状态,控制液体传送装置向拖地模块传输的液体量。当清洁机器人检测到地面材质为木板时,可以控制液体传送装置的出水量,适当减少拖布的供水量,防止水量过多可能对木质地板的损坏。在一实施例中,地面传感器包括视觉传感器,控制模块可以根据视觉传感器获取的地面图像判断工作表面的材料;在另一实施例中,地面传感器可以包括雷达传感器,控制模块可以根据雷达传感器的检测结果判断工作表面的类型。
69.在一个实施例中,清洁机器人还可以包括信号发送装置,信号发送装置可以将湿度检测装置检测到的当前拖地情况(可以包括:拖布湿度、地面湿度、环境湿度等)或者地面传感器检测到的地面状态发送给用户。例如:用户除了可以从清洁机器人机身上的显示器中读取当前区域中的地面湿度;也可以根据信号发送装置向用户发送的地面湿度,从拖地app中读取当前区域中的地面湿度。当用户觉得可以加大或减少液体量拖地时,也可以发送相应的信号至清洁机器人,从而控制模块能基于用户发送的指令控制供液装置传送的液体。采用以上方式智能的控制清洁机器人中的供液装置向拖地模块传送液体,从而提高了清洁机器人的用户体验。
70.进一步的,在本技术的一个实施例中,该清洁机器人可以包括:导航机构。用户可以在导航机构所形成的清洁机器人工作区域地图中进行区域标定,并设定清洁机器人在各个区域中需要采用的液体情况,从而控制模块能基于该液体情况控制液体储存器在各个区域中传送相应的液体,也可以结合基于地面湿度传感器实时更新的当前区域中的地面湿度,根据实时更新的地面湿度判断当前区域的供液情况是否满足用户的需求,若不满足则继续供液,若满足则可以停止对当前区域的拖地工作。在本实施例中,所使用的导航机构可以包括但不限于以下至少之一:超声波传感器、光学传感器(包括:lds等)、uwb传感器、惯性导航系统。
71.在本技术一个实施例中,清洁机器人还可以包括:设置于液体储存器中的液面监测装置。在一个实施例中,当液面监测装置监测到液体储存器中的液面低于预设阈值时,可以向用户发送清洁机器人中液体量不足的通知消息,该通知消息中可以包含清洁机器人中剩余的液体采用当前出液速率还能使用的时间。用户在接收到此通知消息时,可以选择不
回应,可以控制清洁机器人暂停工作,也可以选择调低出液速率,或者选择给清洁机器人添加液体。
72.在另一个实施例中,清洁机器人还可以包括:指示装置,例如:发光指示装置(led等)或者发声指示装置,该指示装置可以用于指示清洁机器人液体量是否充足。指示装置在液体量不低于预设阈值时的状态和低于预设阈值时的状态不同,用户通过观察指示装置的不同状态监测液体储存器中的液面情况。通过提醒用户液体量不足,防止由于缺少液体导致清洁效果变差的缺陷,提高清洁机器人的拖地效果。
73.进一步地,清洁机器人还可以包括至少两个液体储存器,至少两个液体储存器对称地设置在机身两侧。在两个液体储存器中分别放入不同类型的液体,通过控制模块控制与液体储存器相对应的液体传送装置同步或不同步地工作,从而达到清洁不同类型污渍的目的。当然,清洁机器人还可以包括三个、四个等两个以上数目的液体储存器,这些不同液体储存器中可以根据实际需要放置相同或者不同类型的液体,本技术对此不作限定。
74.该清洁机器人可以包括:地面传感器,例如:视觉传感器,通过地面传感器检测地面状态,并将该地面状态发送给控制模块,从而控制模块能分别控制两个液体储存器传送的液体量以及液体类型。该地面状态可以包括:地面材料和/或地面污渍类型。地面传感器能基于检测到的地面材料情况、地面污渍为油污还是灰尘的情况,分别控制两个液体储存器向拖布传送的液体量,其中,传送的液体量可以为0,即,可以控制仅使用其中一个液体储存器。通常情况下,清洁机器人可以按照预先设定的行走路径进行拖地。然而,对于某些区域而言,当清洁机器人检测到该区域地面较干、油污较多时,可以多喷液或者增加清洁机器人的工作时间,直至地面传感器检测到的地面状态满足预设的清洁要求时,清洁机器人停止对此区域的清洁工作。在本实施例中,可以分别控制两个液体储存器向拖地模块传送的液体,直至地面传感器检测到的地面状态满足预设清洁要求时,清洁机器人停止对此区域的清洁工作。
75.该清洁机器人还可以包括:导航机构。用户可以在导航机构所形成的清洁机器人工作区域地图中进行区域标定,并设定清洁机器人在各个区域中需要采用的出液量以及液体类型,从而控制模块能基于该出液量以及液体类型控制液体传送装置在各个区域传送相应的液体量以及液体类型。
76.清洁机器人还可以包括信号发送装置,信号发送装置可以将湿度传感器检测到的拖布湿度或地面传感器检测到的地面状态发送给用户,用户可以在清洁机器人机身上的显示器中读取当前拖地情况,也可以在拖地app中读取当前拖地情况。例如:当用户觉得可以加大或减少液体量拖地时,也可以发送相应的信号至清洁机器人,从而控制模块能基于来自用户的指令控制液体传送装置传送的液体量以及液体类型。该指令可以是通过拖地app发送也可以是用户直接在清洁机器人的交互界面上输入。采用以上方式智能的控制清洁机器人的拖地湿度以及拖地液体类型,提高了清洁机器人的用户体验。进一步的,清洁机器人还可以包括:分别设置于两个液体储存器中的液面监测装置,该液面监测装置用于监测液体储存器中的液面是否低于预设阈值,同时也可以包括分别与两个液面监测装置相对应的用于指示液面情况的指示装置。
77.下面分别通过具有两个液体储存器的具体实施例来进行说明。
78.如图5和图6所示均为存在两个液体储存器的情况。值得说明的是,本技术中各类
装置前的“第一”、“第二”均是为了区分这两个装置为不同装置,并不具有其他特殊含义,例如:下文中的第一软管和第二软管均为软管,但为两个不同的软管。同时,本技术中仅以存在两个液体储存器为例进行说明,也可以为两个以上的液体储存器,原理相同,本技术不再赘述。
79.如图5所示为双液体传送装置双液体储存器的情况。第一液体储存器511通过第一软管521与第一液体传送装置501相连,第二液体储存器512通过第二软管522与第二液体传送装置502相连,第一液体传送装置501以及第二液体传送装置502分别与控制模块电性连接,控制模块可以基于当前拖地需求选择第一液体传送装置501或第二液体传送装置502同时或者分别向拖布传送液体,也可以选择第一液体传送装置501或第二液体传送装置502同时或分别向拖布传送的液体量,从而保证拖地效果。例如,第一液体储存器511中存储有清水,第二液体储存器512中存储有清洁液,当地面传感器检测到地面仅存在灰尘时,则控制模块控制第一液体传送装置501工作,并由第一液体储存器511通过第一软管521向第一液体传送装置501传送清水,从而第一液体传送装置501向拖布传送清水,利用清水清除地面上的灰尘等。当地面传感器检测到地面还存在油污时,则控制模块在控制第一液体传送装置501工作时,同时也控制第二液体传送装置502工作,即由第一液体储存器511通过第一软管521向第一液体传送装置501传送清水的同时,也由第二液体储存器512通过第二软管522向第二液体传送装置502传送清洁液从而第二液体传送装置502向拖布传送清洁液,由于清洁液浓度较高,因此可以控制第二液体传送装置502的工作时间小于某个预设阈值。当第二液体储存器512中存储的是已经调好清洁液浓度的清水时,当地面传感器检测到地面还存在油污时,可以仅控制第二液体传送装置502工作,并利用该调好清洁液浓度的清水清除地面上的油污等。当湿度检测装置检测到的拖布湿度大于预设阈值或者时,控制第一液体储存器511以低于当前出液速率的速率输出清水。当用户在机器人所形成的地图上划定需要多次用清洁液清洁的区域时,清洁机器人针对该区域重复清洁。当地面传感器检测到某区域油污较多时,清洁机器人可以针对该区域重复清洁。
80.如图6所示为单液体传送装置双液体储存器的情况。第三液体储存器513通过第三软管523与第三液体传送装置503相连;第四液体储存器514通过第四软管524与第三液体传送装置503相连。在一种情况下,仅第四软管524上安装有第一阀门531,第一阀门531在控制模块的控制下开启和关闭,控制第四液体储存器514中的液体流向第三液体传送装置503,控制模块基于当前拖地需求选择是否打开第一阀门531。例如,第三液体储存器513中存储有清水,第四液体储存器514中存储有清洁液,当地面传感器检测到地面仅存在灰尘时,则控制模块控制第三液体传送装置503工作,并由第三液体储存器513通过第三软管523向第三液体传送装置503传送清水。当地面传感器检测到地面还存在油污时,则控制模块控制第一阀门531打开,从而控制第四液体储存器514中存储的清洁液流向第三液体传送装置503,即由第三液体储存器513通过第三软管523向第三液体传送装置503传送清水的同时,也由第四液体储存器514通过第四软管524向第三液体传送装置503传送清洁液,从而第三液体传送装置503向拖布传送含有清洁液的清水,由于清洁液浓度较高,因此可以控制第一阀门的工作时间小于某个预设阈值,从而达到清洁不同类型污渍的目的。在另一种情况下,第四软管524上安装有第一阀门531,同时和第一阀门531类似的,第三软管523上安装有第二阀门(图未示)。第一阀门531以及第二阀门在控制模块的控制下开启和关闭,控制第四液体储
存器514以及第三液体储存器513中的液体流向第三液体传送装置503,控制模块基于当前拖地需求选择是否打开第一阀门531、以及第二阀门(图未示)。例如,第三液体储存器513中存储有清水,第四液体储存器514中存储有已经调好清洁液浓度的清水,当地面传感器检测到地面仅存在灰尘时,则控制模块仅控制第二阀门(图未示)打开,控制第三液体传送装置503工作,并由第三液体储存器513通过第三软管523向第三液体传送装置503传送清水,利用清水清除地面上的灰尘等。当地面传感器检测到地面还存在油污时,则控制模块控制第一阀门531打开,从而控制第四液体储存器514中存储的已经调好清洁液浓度的清水流向第三液体传送装置503,即由第四液体储存器514通过第四软管524向第三液体传送装置503传送调好清洁液浓度的清水,并利用该液体拖地清除地面上的油污等,从而达到清洁不同类型污渍的目的。
81.以上所述实施例仅表达了本发明的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对本发明专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变形和改进,这些都属于本发明的保护范围。因此,本发明专利的保护范围应以所附权利要求为准。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。