1.本实用新型涉及智能停车库技术领域,特别是涉及车辆搬运装置。
背景技术:
2.车辆搬运装置应用于智能停车库中,用于实现车辆的存、取。
3.现有的技术为利用agv搬运小车对车辆进行搬运,agv的体积庞大,对于存取车的空间要求较高。
技术实现要素:
4.为了解决上述问题,本实用新型提供了一种车辆搬运装置,技术方案如下:
5.一种车辆搬运装置,包括框架、夹持机构及控制机构,所述夹持机构设于所述框架上,所述夹持机构用于夹持车胎;所述框架包括分体设置的第一支架及第二支架,所述第一支架和第二支架上分别设有所述夹持机构;当所述车辆搬运装置处于第一状态时,所述控制机构控制所述第一支架和第二支架相互靠近并同步运动,当所述车辆搬运装置处于第二状态时,所述控制机构能够控制所述第一支架及所述第二支架相向或相背运动,并控制所述夹持机构夹持或松开所述车胎。
6.如此设置,在第一状态时,第一支架和第二支架合体运动,只需要控制第一支架或第二支架行走即可;在搬运车辆时,需要两个车辆搬运装置同时搬抬车辆的两个前车胎和两个后车胎,在第二状态时,第一支架和第二支架相背运动,定位到车辆两侧的车胎,不同车辆搬运装置的第一支架和第二支架能够任意配对,能够节省成本;控制机构能够协调两个车辆搬运装置统一动作,无需设置额外的传动机构连动其他搬抬四个车胎的机构一起运动,简化结构、减小体积、降低成本,同时降低了机械噪音。
7.在其中一个实施例中,所述第一支架包括第一主体和至少两个第一架体,两个所述第一架体活动地连接于第一主体远离第二支架的一侧并相向设置;
8.所述第二支架包括第二主体和至少两个第二架体,两个所述第二架体活动地连接于第二主体远离第一支架的一侧并相向设置;
9.所述夹持机构包括至少两个第一夹臂及两个第二夹臂,两个所述第一夹臂分别转动地设于两个所述第一架体的一端并相向设置,两个所述第二夹臂分别转动地设于两个所述第二架体的一端并相向设置。
10.如此设置,当车辆搬运装置运动时,第一夹臂及第二夹臂可转动,能够减少与地面的摩擦。
11.在其中一个实施例中,所述车辆搬运装置还包括至少四个行走轮及四个驱动件,其中两个所述行走轮分别设于两个所述第一架体上,另外两个所述行走轮分别设于两个所述第二架体上,其中两个所述驱动件分别设于两个所述第一架体上并分别与其中两个所述行走轮连接,另外两个所述驱动件分别设于两个所述第二架体上并分别与另外两个所述行走轮连接;四个所述驱动件分别能够独立地驱动四个所述行走轮旋转。
12.如此设置,驱动件能够驱动行走轮旋转,即可带动第一架体和第二架体运动,进而带动第一夹臂及第二夹臂运动,无需设置额外的驱动机构,简化结构,且四个驱动件独立控制四个行走轮,能够使得两个第一夹臂相向或相背运动,及,两个第二夹臂相向或相背运动,且能够任意调整车辆搬运装置的行走方向。
13.在其中一个实施例中,所述车辆搬运装置还包括设于所述第一主体内的第一伸缩机构及设于所述第二主体内的第二伸缩机构,所述第一伸缩机构与所述第一架体连接并能够沿所述第一主体做伸缩运动;所述第二伸缩机构与所述第二架体连接并能够沿所述第二主体做伸缩运动。
14.如此设置,第一伸缩机构及第二伸缩机构对于第一架体及第二架体起到固定作用,且对于第一架体及第二架体的运动起到导向作用。
15.在其中一个实施例中,所述第一伸缩机构包括第一连杆及第二连杆,所述第一主体内开设有第一凹槽,所述第一连杆及所述第二连杆均设于所述第一凹槽内,其中一个所述第一架体的一侧连接于所述第一连杆,另外一个所述第一架体的一侧连接于所述第二连杆;
16.所述第二伸缩机构包括第三连杆及第四连杆,所述第二主体内开设有第二凹槽,所述第三连杆及所述第四连杆均设于所述第二凹槽内,其中一个所述第二架体的一侧连接于所述第三连杆,另外一个所述第二架体的一侧连接于所述第四连杆。
17.在其中一个实施例中,所述第一连杆及所述第二连杆均呈“l”型且相对设置,所述第一连杆及所述第二连杆均设有第一台阶,当所述第一连杆和所述第二连杆相向运动时,所述第一连杆的一端抵接于所述第二连杆的第一台阶,及/或,所述第二连杆的一端抵接于所述第一连杆的第一台阶;
18.所述第三连杆及所述第四连杆均呈“l”型且相对设置,所述第三连杆及所述第四连杆均设有第二台阶,当所述第三连杆和所述第四连杆相向运动时,所述第三连杆的一端抵接于所述第四连杆的第二台阶,及/或,所述第四连杆的一端抵接于所述第三连杆的第二台阶。
19.如此设置,对于第一架体及第二架体进行限位,使得第一架体和第二架体无论处于何种状态都能够保持间隙,防止发生干涉。
20.在其中一个实施例中,所述第一夹臂及/或所述第二夹臂为滚筒。
21.在其中一个实施例中,所述车辆搬运装置包括第三识别组件,所述第三识别组件设于所述框架上并与所述控制机构电性连接,用于检测所述车辆搬运装置当前所处的状态。
22.如此设置,能够使得控制机构做出正确的指令。
23.在其中一个实施例中,所述第三识别组件包括至少两个测距传感器,其中一个所述测距传感器设于所述第一支架远离所述第二支架的侧面,另外一个所述测距传感器设于所述第二支架远离所述第一支架的侧面,以测量所述第一支架和所述第二支架之间的距离。
24.在其中一个实施例中,所述控制机构还包括车辆识别组件和车轮识别组件,所述车辆识别组件设于所述框架的一端,用于检测所述车辆的位置,所述车轮识别组件设于所述框架上,用于检测所述车胎的位置。
25.如此设置,能够定位到车辆及车胎,使得控制机构能够让第一支架及第二支架运行到指定位置,从而能够搬运车辆。
26.与现有技术相比,本实用新型通过将框架分体设置,当需要搬运车辆时,第一支架和第二支架分离,从而搬运车辆,控制机构能够协同左右两侧的第一支架和第二支架同步运动,无需设置连动搬运四个车胎的机构的传动机构,能够简化结构、减小体积;并且,不同的车辆搬运装置的第一支架和第二支架能够任意配对,减少维护成本。
附图说明
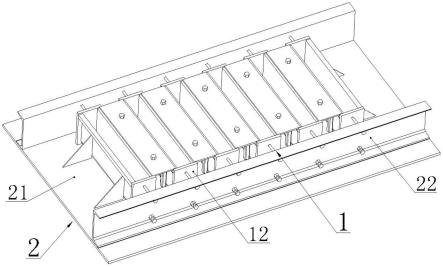
27.图1为本实用新型提供的车辆搬运装置在第一状态时的结构示意图;
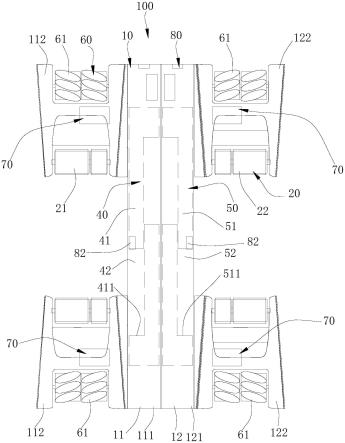
28.图2为车辆搬运装置在第二状态时的结构示意图;
29.图3为车辆搬运装置在夹持车胎时的结构示意图;
30.图4为车辆搬运装置定位车辆时的俯视图;
31.图5为车辆搬运装置定位好车辆后进行左右调整的俯视图;
32.图6为车辆搬运装置定位车胎的俯视图;
33.图7为第一支架和第二支架分别定位至车胎的俯视图;
34.图8为第一支架和第二支架分别定位至车胎的侧视图;
35.图9为夹持机构夹持车胎的侧视图;
36.图10为车辆搬运装置沿竖直方向搬运车辆的过程示意图;
37.图11为车辆搬运装置沿水平方向搬运车辆的过程示意图;
38.图12为车辆搬运装置斜向搬运车辆的过程示意图;
39.图13车辆搬运装置调整车辆的方向的过程示意图。
40.图中各符号表示含义如下:
41.100、车辆搬运装置;10、框架;11、第一支架;111、第一主体;112、第一架体;12、第二支架;121、第二主体;122、第二架体;20、夹持机构;21、第一夹臂;22、第二夹臂;40、第一伸缩机构;41、第一连杆;411、第一台阶;42、第二连杆;50、第二伸缩机构;51、第三连杆;511、第二台阶;52、第四连杆;60、行走机构;61、行走轮;70、驱动件;80、识别机构;81、车辆识别组件;82、车轮识别组件;83、第三识别组件;200、车辆;201、车胎。
具体实施方式
42.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
43.需要说明的是,当组件被称为“装设于”另一个组件,它可以直接在另一个组件上或者也可以存在居中的组件。当一个组件被认为是“设置于”另一个组件,它可以是直接设置在另一个组件上或者可能同时存在居中组件。当一个组件被认为是“固定于”另一个组件,它可以是直接固定在另一个组件上或者可能同时存在居中组件。
44.除非另有定义,本文所使用的所有的技术和科学术语与属于本实用新型的技术领域的技术人员通常理解的含义相同。本文中在本实用新型的说明书中所使用的术语只是为
了描述具体的实施例的目的,不是旨在于限制本实用新型。本文所使用的术语“或/及”包括一个或多个相关的所列项目的任意的和所有的组合。
45.请参见图1,本实用新型提供的一种车辆搬运装置100,应用于智能停车库中,用于实现自动搬运车辆200,不仅能够节约车辆200停放空间,还能够节约停车、取车过程中消耗的时间。车辆200可为轿车、越野车、电动汽车等。
46.具体地,车辆搬运装置100包括框架10、夹持机构20及控制机构(图未示),夹持机构20设于框架10上,夹持机构20用于夹持车辆200的轮胎,控制机构用于控制车辆搬运装置100运动。
47.框架10包括第一支架11和第二支架12,第一支架11和第二支架12分体设置,第一支架11及第二支架12上分别设有夹持机构20。
48.请参见图1,当车辆搬运装置100处于第一状态时,第一支架11和第二支架12合并,控制机构控制第一支架11的侧面和第二支架12侧面靠近至贴合并一起行走;请参见图2及图3,当车辆搬运装置100处于第二状态时,控制机构控制第一支架11和第二支架12相背或相向运动,在第一支架11和第二支架12相背运动时,控制机构控制夹持机构20夹持车辆200轮胎。
49.在本实用新型中,第一状态为车辆搬运装置100处于待机或普通行走状态时,第二状态为车辆搬运装置100处于工作状态,工作状态指的是需要第一支架11及第二支架12相互分离至夹持车辆200两侧轮胎的夹持轮胎状态,及,搬运结束后第一支架11及第二支架12相互靠拢直到相互贴合状态。
50.本实用新型的车辆搬运装置100体积小巧,在第一状态时,第一支架11和第二支架12同步运动,只需要控制第一支架11或第二支架12行走即可;在搬运车辆200时,需要两个车辆搬运装置100同时搬抬车辆200的两个前车胎201和两个后车胎201。在第二状态时,第一支架11和第二支架12相背离运动定位到车辆200两侧的车胎201,不同车辆搬运装置100的第一支架11和第二支架12能够任意配对,即便第一支架11或第二支架12其中一个损坏,只需要更换损坏的单个支架而无需两个全部更换,能够节省成本;控制机构能够同时协调两个车辆搬运装置100统一动作,无需设置额外的传动机构连动其他搬抬四个车胎201的机构一起运动,简化结构、减小体积、降低成本,同时降低了机械噪音。
51.在本实施例中,控制机构为两个,并分别设于第一支架11及第二支架12上,两个控制机构在第一支架11及第二支架12分离时能够随之运动,两个控制机构之间通信连接,以控制第一支架11和第二支架12同步运动。在其他实施例中,控制机构也可以不设于框架10上,而采用远程控制的方式控制第一支架11及第二支架12运动。
52.第一支架11包括第一主体111及至少两个第一架体112,第二支架12包括第二主体121和至少两个第二架体122,两个第一架体112活动地连接于第一主体111远离第二主体121的侧面,两个第一架体112能够在第一主体111上相向或相背运动,两个第二架体122活动地连接于第二主体121的远离第一主体111的侧面,两个第二架体122能够在第二主体121上相向或相背运动。
53.夹持机构20包括至少两个第一夹臂21及至少两个第二夹臂22,两个第一夹臂21分别转动地设于两个第一架体112上,且相对设置,两个第二夹臂22分别设于两个第二架体122上,且相对设置,即,两个第一夹臂21分别设于第一架体112靠近另一个第一架体112的
一端,两个第二夹臂22分别设于第二架体122靠近另一个第二架体122的一端,两个第一夹臂21能够相向或相背运动,两个第二夹臂22能够相向或相背运动,以实现对于轮胎的夹持或松开。
54.请参见图8及图9,第一夹臂21为滚筒,及/或第二夹臂22为滚筒,以适应轮胎的形状。当两个第一夹臂21及两个第二夹臂22分别相向运动至车辆200底部时,可分别夹紧车胎201,此时,两个第一夹臂21及两个第二夹臂22继续相向运动,直到将车辆200抬升,以进行搬运。本实用新型的车辆搬运装置100无需设置抬升机构,进一步减小体积、简化结构。
55.车辆搬运装置100还包括第一伸缩机构40及第二伸缩机构50,第一伸缩机构40及第二伸缩机构50分别设于第一主体111内及第二主体121内,第一伸缩机构40连接于第一架体112,并能够沿着第一架体112做伸缩运动,第二伸缩机构50连接于第二架体122,并能够沿着第二架体122做伸缩运动。第一伸缩机构40及第二伸缩机构50对于第一架体112及第二架体122起到连接及导向作用。
56.第一伸缩机构40包括第一连杆41及第二连杆42,第一主体111内开设有第一凹槽(图未示),第一连杆41及第二连杆42均设于第一凹槽内,其中一个第一架体112的一侧连接于第一连杆41,另外一个第一架体112的一侧连接于第二连杆42。
57.第一连杆41和第二连杆42均呈“l”型,并相对设置,第一连杆41及第二连杆42均设有第一台阶411。第一连杆41和第二连杆42在两个第一架体112的带动下相向运动时,形成矩形,第一连杆41的一端抵接于第二连杆42的第一台阶411上,或,第二连杆42的一端抵接于第一连杆41的第一台阶411上,或,第一连接的一端抵接于第二连杆42的第一台阶411上,同时,第二连杆42的一端抵接于第一连杆41的第一台阶411上,以防止两个第一架体112碰撞干涉;当第一连杆41和第二连杆42相背运动时,第一连杆41和第二连杆42分别能够抵接于第一凹槽的槽壁,以对第一架体112进行限位。
58.同样地,第二伸缩机构50包括第三连杆51及第四连杆52,第二主体121远离第一主体111的侧面开设有第二凹槽(图未示),第三连杆51及第四连杆52设于第二凹槽内,其中一个第二架体122的一侧连接于第三连杆51,另外一个第二架体122的一侧连接于第四连杆52。
59.第三连杆51和第四连杆52均呈“l”型,并相对设置,第三连杆51及第四连杆52均设有第二台阶511,第三连杆51和第四连杆52在两个第二架体122的带动下相向运动时,形成矩形,第三连杆51的一端抵接于第四连杆52的第二台阶511上,或,第四连杆52的一端抵接于第三连杆51的第二台阶511上,或,第三连杆51的一端抵接于第四连杆52的第二台阶511上,同时,第四连杆52的一端抵接于第三连杆51的第二台阶511上,以对第二架体122进行轴向限位;当两个第二架体122相背运动时,第三连杆51及第四连杆52能够与第二凹槽的槽壁抵接,以限制两个第二架体122继续相背运动。
60.车辆搬运装置100还包括行走机构60及驱动件70,行走机构60及驱动件70设于框架10上,驱动件70连接于行走机构60,用于驱动行走机构60旋转,以使行走机构60能够行走。
61.具体地,驱动件70至少为四个,四个驱动件70分别与两个控制机构电性连接。行走机构60包括至少四个行走轮61,四个行走轮61分别设于两个第一架体112远离第一夹臂21的一端及两个第二架体122远离第二夹臂22的一端,四个驱动件70分别设于两个第一架体
112及两个第二架体122内,四个驱动件70分别与四个行走轮61连接,能够分别独立驱动四个行走轮61旋转。
62.控制机构能够通过驱动件70控制行走轮61旋转,当行走轮61旋转时,即可行走,当需要夹持车胎201时,控制机构分别控制两端的行走轮61异向旋转,从而使得第一架体112和第二架体122上的行走轮61相向运动,带动两个第一夹臂21及两个第二夹臂22相向运动,无需额外设置驱动第一夹臂21和第二夹臂22运动的机构,能够减小体积、简化结构。
63.请参见图10,当车辆搬运装置100需要直线运动时,控制机构控制四个行走轮61同速旋转;请参见图11及图12,当车辆搬运装置100需要改变方向时,控制机构控制四个行走轮61差速旋转,使得车辆搬运装置100改变方向,再控制四个行走轮61同速旋转,以实现斜向或横向运动,车辆搬运装置100能够在地面上任意行走、旋转,无需设定特定的轨道,降低了智能停车库的结构的复杂性,节省了成本。
64.优选地,行走轮61为麦克纳姆轮,不仅能够实现全方位移动,并且,运行平稳。
65.车辆搬运装置100还包括识别机构80,识别机构80与控制机构电性连接,识别机构80设于框架10上,识别机构80能够定位车辆200位置,定位车胎201位置,同时能够判断当前车辆搬运装置100所处的状态。
66.具体地,识别机构80包括车辆识别组件81及车轮识别组件82,车辆识别组件81及车轮识别组件82与控制机构电性连接并设于框架10上,车辆识别组件81用于检测车辆200的所在位置,车轮识别组件82用于检测车胎201的所在位置。
67.优选地,车辆识别组件81至少为两个,两个车辆识别组件81分别设于第一主体111及第二主体121的一端,能够无所遮挡地检测到车辆200。车辆识别组件81可包括激光测距传感器或超声波传感器等能够检测距离的仪器。
68.车轮识别组件82至少为两个,其中一个车轮识别组件82设于第一主体111的长度方向的中心线上,且远离第二主体121的一侧,另外一个车轮识别组件82设于第二主体121的长度方向的中心线上,且远离第一主体111的一侧,当第一连杆41和第二连杆42抵接时,第一架体112和第二架体122相对第一连杆41及第二连杆42的长度方向的中心线对称设置。可以理解,将车轮识别组件82设于第一主体111及第二主体121的中心线上,以使车辆搬运装置100能够准确地定位到车胎201,并控制第一架体112及第二架体122相向运动。车轮识别组件82可包括激光测距传感器或超声波传感器等能够检测距离的仪器。
69.当第一连杆41和第二连杆42抵接时,第一架体112和第二架体122间隔设置,车轮识别组件82位于第一架体112和第二架体122之间的间隙的延伸处,以使车轮识别组件82能够沿着第一架体112和第二架体122支架内的间隙检测到车胎201的位置。
70.识别机构80还包括第三识别组件83,第三识别组件83设于框架10上并与控制机构电性连接,用于识别当前车辆搬运装置100所处的状态,即,识别当前车辆搬运装置100处于待机或普通行走状态时,还是处于工作状态。
71.第三识别组件83包括至少两个测距传感器,两个测距传感器分别设于第一主体111及第二主体121上,且其中一个第三识别组件83设于第一主体111靠近第二主体121的侧面,另外一个第三识别组件83设于第二主体121靠近第一主体111的侧面,通过检测第一主体111和第二主体121之间的距离,以识别车辆搬运装置100所处的状态。
72.在本实施例中,测距传感器为激光测距传感器,激光测距传感器体积小,准确度
高。在其他实施例中,测距传感器还可为超声波传感器、红外传感器等能够检测距离的仪器。
73.请参见图4至图7,在工作过程中,车辆识别组件81定位车辆200的位置,控制机构控制第一支架11和第二支架12合体并同步行走至车辆200的正前方或正后方,并左右调整距离,控制机构控制行走轮61改变方向,并行走至车辆200底部,车轮识别组件82定位车胎201位置,控制机构控制第一支架11和第二支架12分离,第一支架11朝向左边的车胎201运动,第二支架12朝向右边的车胎201运动;驱动件70分别驱动行走轮61旋转,两个第一夹臂21和两个第二夹臂22在行走轮61的带动下相向运动,夹持车胎201,同时将车辆200抬升,将车辆200搬运至指定位置。
74.以上所述实施例的各技术特征可以进行任意的组合,为使描述简洁,上述实施例中的各个技术特征所有可能的组合都进行描述,然而,只要这些技术特征的组合不存在矛盾,都应当认为是本说明书记载的范围。
75.以上所述实施例仅表达了本实用新型的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对实用新型专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本实用新型构思的前提下,还可以做出若干变形和改进,这些都属于本实用新型的保护范围。因此,本实用新型专利的保护范围应以所附权利要求为准。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。