1.本实用新型属于四足机器人技术领域,尤其是涉及一种机器人的腿部机构及四足机器人。
背景技术:
2.四足机器人(机器狗)是一种仿生的机器人,相比传统的轮式机器人来说,能够行走移动至轮式机器人所不能到达的复杂路面,即四足机器人能够适应复杂的地形环境。四足机器人结构包括躯干以及四肢(四条腿)。腿通过电机驱动,实现抬腿、伸腿、走路等动作。每一条腿都包括有三个电机,侧摆电机(控制腿相对躯干来说,左右方向上的转动),髋关节电机(控制腿相对于躯干来说,前后方向上的转动),膝关节电机(控制小腿相对大腿的转动)。
3.膝关节电机外部有摆臂,摆臂末端转动连接有连杆,连杆的另一端转动连接于小腿的顶部(可记为a点)。髋关节电机固定连接有可跟着髋关节电机旋转而旋转的大腿,大腿的末端转动连接于小腿(可记为b点)。a点的位置高于b点。从而摆臂 连杆 ab连线(小腿的一段)之间形成曲柄摇杆机构,可通过膝关节电机的旋转带动摆臂的旋转,从而通过摆臂旋转带动小腿旋转。
4.在理论上曲柄摇杆机构可以在曲柄的旋转平面内360
°
旋转,而在将其应用在四足机器人腿的时候,由于大腿、小腿具有一定粗细,并且内部零件也需要占据一定的空间,因此实际上的摆臂并不能在其旋转平面内360
°
的旋转。控制模块通过控制膝关节电机的转动方向以及转动角度来控制小腿和大腿之间的夹角,随着机器狗使用时间的增加,内部关节结构之间的磨损,会导致控制时电机的转动角度和理想状态中的转动角度发生一定的偏差,这就会使连杆的活动范围超出预设的活动范围,如果小腿在收拢时连杆活动范围超出预设的活动范围的话(即过度收腿),那么连杆容易被卡住,发生弯曲甚至断裂;如果小腿在伸展时连杆活动范围超出预设的活动范围的话(即过度伸展),那么小腿的顶部会和大腿的底部发生碰撞、产生磨损甚至损坏。
5.因此为了避免上述情况的产生,需要一种保护性更好的四足机器人腿部结构。
技术实现要素:
6.为了克服现有技术的不足,本实用新型提供一种可以有效限制四足机器人的大腿和小腿之间的活动范围,延长其使用寿命的机器人的腿部机构及四足机器人。
7.本实用新型解决其技术问题所采用的技术方案是:一种机器人的腿部机构,包括大腿,与大腿转动相连的小腿,及驱动大腿和小腿相对运动的传动单元,所述传动单元包括与驱动电机相连的驱动轴,连接于驱动轴的摆臂,与摆臂相连的连杆,及限位机构,所述摆臂在驱动轴所在水平面的上方旋转,所述限位机构用于限制摆臂的旋转角度在20
°‑
145
°
之间。
8.本实用新型利用限位机构的设置,使得摆臂的旋转角度限定在20
°‑
145
°
之间,即
使电机的转动角度发生一定的偏差,也能通过限位机构的硬纤维保证连杆在一定范围内活动,不会因为过量转动而引发连杆的弯曲或断裂,也减少了连杆与大腿和小腿之间的碰撞,从而使得连杆的使用寿命得到了延长。
9.进一步的,所述连杆和小腿在a点相连,所述大腿和小腿在b点相连,所述摆臂和连杆在c点相连,所述摆臂和驱动轴在d点相连,所述a点、b点、c点和d点围设形成平行四边形。
10.平行四边形的设置,连杆在带动小腿转动的时候能够更加顺畅,并且由于平行四边形对边长度和内角度数相等的关系,对小腿的控制更加简单方便。
11.进一步的,所述限位机构为两个可与摆臂相抵的限位销,两个限位销各自和驱动轴轴心的连线与所述驱动轴所在水平面的夹角相等。
12.这样的设置能够在小腿活动范围相同的情况下,保证连杆转动过程中覆盖的面积最小,给大腿和小腿的内部设置其他结构留下了足够的空间。
13.限位机构的结构简单,可以在多个区域中择一设置,安装灵活度高,且对摆臂的限位作用稳固有效。
14.进一步的,所述驱动轴通过减速器和驱动电机相连,所述限位销设于减速器外侧,所述减速器和/或驱动电机外部包裹有关节保护套。
15.限位销设置在减速器的外侧,安装方便,对其零部件的安装不会产生不利影响,且限位销的结构更加稳固。
16.进一步的,所述限位销和驱动轴轴心的连线与所述驱动轴所在水平面的夹角为α,所述b点和d点之间的距离为l1,所述关节保护套的外径为r3,则sinα≥r3/l1。
17.在满足上述条件下,即使小腿向大腿收拢至极限位置,小腿也不会碰撞驱动电机。
18.进一步的,所述限位销与所述驱动轴的轴心间距为r,所述c点和d点之间的距离为r1,则0.5r1≤r≤r1。
19.在满足上述条件下,限位销的位置限定能够保证摆臂在抵触限位销时,产生较大的力不会使摆臂弯折,甚至断裂,同时无需较大的碰撞外力就能立即阻止摆臂的继续活动。
20.进一步的,所述限位销外设有缓冲层。缓冲层由弹性材质制成,可以形成有效的缓冲作用,较小限位销与摆臂碰撞产生的损伤。
21.进一步的,所述小腿顶端设有缓冲套。缓冲套由弹性材质制成,形成一定的缓冲作用,避免小腿在张开的极限位置时其顶端和大腿形成强烈的撞击导致损坏。
22.进一步的,所述大腿内壁设有可与连杆相抵的凸部。凸部可以减小连杆与大腿碰撞时的接触面积,有效避免连杆或大腿的损伤。
23.本实用信心还公开了一种四足机器人,包括机身和四个腿部机构,所述腿部机构包括大腿,与大腿转动相连的小腿,及驱动大腿和小腿相对运动的传动单元,所述传动单元包括与驱动电机相连的驱动轴,连接于驱动轴的摆臂,与摆臂相连的连杆,及限位机构,所述摆臂在驱动轴所在水平面的上方旋转,所述限位机构用于限制摆臂的旋转角度在20
°‑
145
°
之间。
24.本实用新型的有益效果是:利用限位机构的设置,配合驱动电机,使得摆臂的旋转角度限定在20
°‑
145
°
之间,即使电机的转动角度发生一定的偏差,保证连杆的顺利活动,不会发生弯曲或断裂,也减少了连杆与大腿和小腿之间的碰撞,延长了连杆的使用寿命;限位机构结构简单、有效;连杆转动过程中覆盖的面积最小,给大腿和小腿的内部设置其他结构
留下了足够的空间。
附图说明
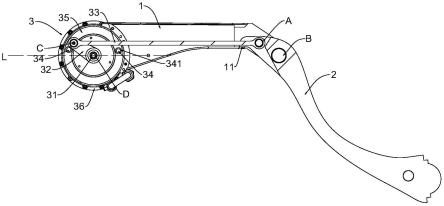
25.图1为本实用新型的腿部机构的大腿和小腿张开至最大状态的结构示意图。
26.图2为本实用新型的腿部机构的大腿和小腿合拢至最小状态的结构示意图。
27.图3为本实用新型的腿部机构的大腿和小腿开合过程简示图一。
28.图4为本实用新型的腿部机构的大腿和小腿合拢至最小状态的简示图。
29.图5为本实用新型的腿部机构的大腿和小腿张开至最大状态的简示图。
具体实施方式
30.为了使本技术领域的人员更好的理解本实用新型方案,下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整的描述,显然,所描述的实施例仅仅是本实用新型的一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都应当属于本实用新型保护的范围。
31.如图1、图2所示,一种机器人的腿部机构,包括大腿1,与大腿1转动相连的小腿2,及驱动大腿1和小腿2相对运动的传动单元3。所述的传动单元3包括与驱动电机(图中未示出)相连的驱动轴31,连接在驱动轴31上、可以随着驱动轴31转动的摆臂32,与摆臂32相连的连杆33,及限位机构。摆臂32在驱动轴31所在水平面的上方旋转,即在图1中所示的l线上方区域旋转,限位机构则用于限制摆臂32的旋转角度在20
°‑
145
°
之间,此时大腿1和小腿2相对张开或收拢时,连杆33不会超出会造成故障的活动范围,保证大腿1和小腿2之间的有效活动,减少了连杆33和大腿1、小腿2之间的碰撞,继而减少连杆33破损或弯曲的可能。
32.如图3所示,连杆33和小腿2的连接点为a点,大腿1和小腿2的连接点为b点,a点高于b点,摆臂32和连杆33的连接点为c点,摆臂32和驱动轴31的连接点为d点,c点高于d点,则上述的a点、b点、c点和d点围设形成平行四边形。也就是说,图3中r1=r2。从而在连杆33转动时,其转动过程中覆盖的面积最小,以留下足够的空间,便于大腿1和/或小腿2的内部设置其他结构。此时,两个限位销34和摆臂32的转动中心,也就是驱动轴31的轴心,之间形成的夹角,等于小腿2相对大腿1能够旋转的夹角,即图5中β角为20
°‑
145
°
。
33.在本实施例中,限位机构为两个可以与摆臂32相抵的限位销34,限位销34为与驱动轴31相平行的柱形结构,两个限位销34各自和驱动轴31的轴心的连线与驱动轴31所在水平面的夹角相等;应当注意的是此时机器人的大腿部分(即bd连线)水平设置。即如图3所示,驱动轴31所在水平面由l线指示,驱动轴31所在竖直面由s线指示,从而两个限位销34以s线为对称轴对称设置在其两侧,且限位销34和驱动轴31轴心的连线与l线的夹角为α角,其角度范围为17.5
°
≤α≤80
°
。
34.驱动轴31通过减速器35和驱动电机相连,限位销34设置在减速器35的外侧,而且减速器35的外部,或者驱动电机的外部,或者两者的外部包裹有关节保护套36。
35.定义关节保护套36的外径为r3,b点和d点之间的距离为l1,则sinα≥r3/l1。在满足上述条件下,即使小腿2向大腿1收拢至极限位置,小腿2也不会碰撞驱动电机。需要说明的是,进行上述距离l1的测算时,需要忽略大腿1、小腿2的宽度、厚度等,将其简化成线性模
型,以便于计算。
36.定义限位销34与驱动轴31的轴心间距为r,c点和d点之间的距离为r1,则0.5r1≤r≤r1。在满足上述条件下,限位销34的位置限定能够保证摆臂32在抵触限位销34时,产生较大的力不会使摆臂32弯折,甚至断裂。
37.为了进一步减小限位销34和摆臂32在抵触时产生的撞击力,在限位销34外设有缓冲层341,其由弹性材质制成,形成一定的缓冲作用,使得限位销34和摆臂32抵触时的力能最大限度被分散。
38.同样的,大腿1和小腿2展开至最大角度时,为了避免小腿2抵触大腿1时产生过大的撞击力,在小腿2顶端设有缓冲套,其由弹性材质制成,形成一定的缓冲作用。
39.为了避免连杆33和大腿1之间产生较多的、较大面积的接触,导致连杆33的损坏,在大腿1内壁设有可以与连杆33相抵的凸部11,其可以减小连杆33与大腿1的接触面积。
40.本实用新型还公开一种四足机器人,其包括机身和四个腿部机构,腿部机构的结构与上述相同,不再赘述。
41.上述具体实施方式用来解释说明本实用新型,而不是对本实用新型进行限制,在本实用新型的精神和权利要求的保护范围内,对本实用新型作出的任何修改和改变,都落入本实用新型的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。