技术特征:
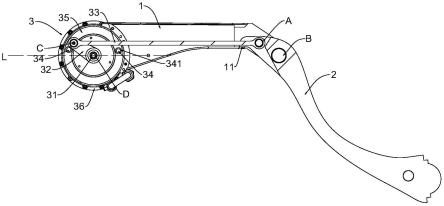
1.一种机器人的腿部机构,包括大腿(1),与大腿(1)转动相连的小腿(2),及驱动大腿(1)和小腿(2)相对运动的传动单元(3),其特征在于:所述传动单元(3)包括与驱动电机相连的驱动轴(31),连接于驱动轴(31)的摆臂(32),与摆臂(32)相连的连杆(33),及限位机构,所述摆臂(32)在驱动轴(31)所在水平面的上方旋转,所述限位机构用于限制摆臂(32)的旋转角度在20
°‑
145
°
之间。2.根据权利要求1所述的机器人的腿部机构,其特征在于:所述连杆(33)和小腿(2)在a点相连,所述大腿(1)和小腿(2)在b点相连,所述摆臂(32)和连杆(33)在c点相连,所述摆臂(32)和驱动轴(31)在d点相连,所述a点、b点、c点和d点围设形成平行四边形。3.根据权利要求2所述的机器人的腿部机构,其特征在于:所述限位机构为两个可与摆臂(32)相抵的限位销(34),两个限位销(34)各自和驱动轴(31)轴心的连线与所述驱动轴(31)所在水平面的夹角相等。4.根据权利要求3所述的机器人的腿部机构,其特征在于:所述驱动轴(31)通过减速器(35)和驱动电机相连,所述限位销(34)设于减速器(35)外侧,所述减速器(35)和/或驱动电机外部包裹有关节保护套(36)。5.根据权利要求4所述的机器人的腿部机构,其特征在于:所述限位销(34)和驱动轴(31)轴心的连线与所述驱动轴(31)所在水平面的夹角为α,所述b点和d点之间的距离为l1,所述关节保护套(36)的外径为r3,则sinα≥r3/l1。6.根据权利要求3所述的机器人的腿部机构,其特征在于:所述限位销(34)与所述驱动轴(31)的轴心间距为r,所述c点和d点之间的距离为r1,则0.5r1≤r≤r1。7.根据权利要求3所述的机器人的腿部机构,其特征在于:所述限位销(34)外设有缓冲层(341)。8.根据权利要求1所述的机器人的腿部机构,其特征在于:所述小腿(2)顶端设有缓冲套。9.根据权利要求1所述的机器人的腿部机构,其特征在于:所述大腿(1)内壁设有可与连杆(33)相抵的凸部(11)。10.一种四足机器人,包括机身和四个腿部机构,所述腿部机构包括大腿(1),与大腿(1)转动相连的小腿(2),及驱动大腿(1)和小腿(2)相对运动的传动单元(3),其特征在于:所述传动单元(3)包括与驱动电机相连的驱动轴(31),连接于驱动轴(31)的摆臂(32),与摆臂(32)相连的连杆(33),及限位机构,所述摆臂(32)在驱动轴(31)所在水平面的上方旋转,所述限位机构用于限制摆臂(32)的旋转角度在20
°‑
145
°
之间。
技术总结
本实用新型公开了一种机器人的腿部机构,包括大腿,小腿,及传动单元,传动单元包括与驱动电机相连的驱动轴,连接于驱动轴的摆臂,与摆臂相连的连杆,及限位机构,摆臂在驱动轴所在水平面的上方旋转,限位机构用于限制摆臂的旋转角度在20
技术研发人员:赵逸栋 张学垠 陈申红 李超 朱秋国
受保护的技术使用者:杭州云深处科技有限公司
技术研发日:2021.10.08
技术公布日:2022/6/7
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。