1.本实用新型属于海上拖体控制设备技术领域,特别是一种海上拖体设备自动收放及拖曳装置。
背景技术:
2.我国海域辽阔,海洋资源富饶,但是,我们对海洋的了解和开发都很少,近些年,随着拖体,水下机器人等探测的设备快速发展,海下探测任务越来越多。由于海况的瞬息万变,突发恶劣海况频繁,往往很难保证探测设备收放工作的高效性和稳定性,这对海上探测设备的自动化收放装置一直是巨大的挑战。
3.现在自动化收放机构还较少,多为半自动化收放,需要人工实时观察和手动调整;就已有的自动化收放机构来说,多为悬臂式,翻转式和直行升降式。其中悬臂式,力矩长,机构重,所需电机功率大,能耗高;直行升降式,执行机构多,动作繁琐,升降对船干舷要求较高,且机构中间空间小,对拖体尺寸要求较高。
4.目前,就自动化收放装置来说,能否对探测设备提供稳定安全简单快捷的收放及稳定的拖曳环境,以保证声呐能发挥出更好的探测效能是评判收放装置性能优良的重要考核指标。
技术实现要素:
5.本实用新型的目的在于提供一种海上拖体设备自动收放及拖曳装置。
6.本实用新型解决上述问题的技术方案为:一种海上拖体设备自动收放及拖曳装置,包括
7.旋转收放装置,拖体限位装置,绞车装置,拖曳设备,电气控制系统,底座,存放篮;
8.所述旋转收放装置安装在底座的固定座上;
9.所述旋转收放装置包括两个电动缸和门式架,所述门式架包括两组平行四边形机构,每组平行四边形机构包括两个旋转臂,电动缸通过销轴和第一旋转臂连接,第一旋转臂通过螺栓和连接板金与第二旋转臂连接;两组平行四边形机构的旋转臂在顶端通过两个连接杆对应连接;所述连接杆中部设有连接篮固定件;
10.所述拖体限位装置固定在旋转收放装置上;
11.所述拖体限位装置包括连接篮和用于拖体限位的弹性卡爪与压机翼板;当船在一定航速下收拖体时,拖体被收入拖体限位装置,由卡爪和压机翼板限位住,随着旋转收放装置同步旋转上行,最终放入固定的存放篮;
12.所述绞车装置固定在底座上,绞车装置包括线缆和滚筒组成,由伺服电机控制放缆和收缆;
13.电气控制系统包括控制绞车装置放缆和收缆的伺服电机、控制丝杆电缸的伺服控制器和上位机;由上位机软件操作,通过plc程序控制整个设备的运行。
14.所述存放篮通过螺栓连接固定在底座中间位置。
15.按上述方案,所述丝杆电缸通过销轴和底座连接,丝杆电缸推动门式架翻转时,通过丝杆电缸的伸出的长度来控制门式架翻转的角度。
16.按上述方案,所述拖体限位装置中弹性卡爪和压机翼板限位拖体时,使拖体一直呈与底座平行的状态。
17.按上述方案,所述弹性卡爪与连接篮之间设有两组弹簧,拖体限位卡紧时,弹簧压缩量处于设定区域。
18.按上述方案,所述电动缸为丝杆电动缸。
19.该装置工作的原理是:
20.船在一定航速下,机构放出过程,首先其中通过电气控制系统控制旋转收放装置中两个电缸同步推出是门式架带着拖体限位装置及拖体翻转,到门式架翻转至与底座成180
°
,此时使拖体从存放篮存放位翻转放入水中,然后绞车开始放设定缆长,然后两个电缸同步收回,使门式架翻转到一定角度到机构拖曳位将拖体限位装置拉升到甲板之上的高度,然后开始放缆,使拖体下潜达到一定深度,完成放出动作,之后即可进行拖曳工作。
21.机构收回动作,通过电气控制系统控制旋转收放装置中两个电缸同步推出使门式架从拖曳位翻转至与底座成180
°
,然后绞车开始收缆,直至拖体收入拖体限位装置中,然后电缸拉动门式架翻转,带着拖体限位装置及拖体收回放入存放篮,完成收回动作。
22.本实用新型装置带来的有益效果是:
23.本实用新型装置其机构总成运动简单,传动效率高,且通过门式架两侧稳定的平行四边形结构,和缆绳的拉紧力及拖体弹性限位机构很好的保证了拖体在运动过程的稳定性,即使在三级海况下收放,依然可以保证收放稳定。
附图说明
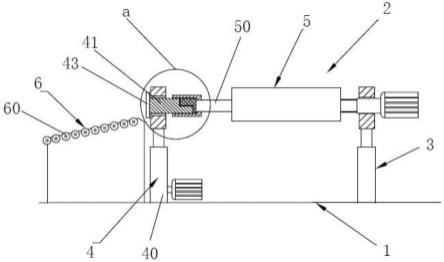
24.图1是本实用新型一个实施例的装置的结构示意图;
25.图2是本实用新型一个实施例的旋转收放装置的结构示意图;
26.图3是本实用新型一个实施例的拖体限位装置的结构示意图;
27.图中:1-存放篮;2-拖体限位装置;3-绞车装置;4-底座;5-电气控制系统;6-旋转收放装置;7-连接篮固定件;8-连接钣金;9-电动缸;10-旋转臂;11-旋转臂;12-加强筋;13-连接篮;14-弹性压缆滚筒;15-压机翼板;16-拖体;17-弹簧卡爪;18-缆线滑轮盘。
具体实施方式
28.为了使本实用新型的目的、技术方案及优点更加清楚明白,以下结合实施例,对本实用新型进行进一步详细说明。应当理解,此处所描述的具体实施例仅用以解释本实用新型,并不用于限定本实用新型。
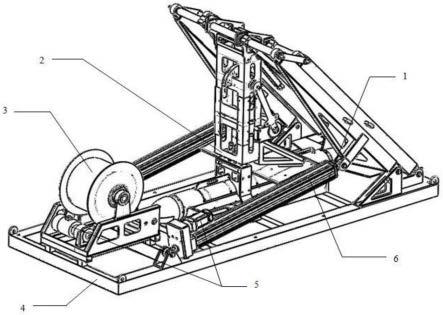
29.如图1所示,一种可以通过自动化控制完成拖体收放及拖曳的设备,包括存放篮1;拖体限位装置2;绞车装置3;底座4;电气控制系统5;旋转收放装置6。
30.如图2,旋转收放装置包括两个电动缸和门式架,门式架包括两组平行四边形机构,每组平行四边形机构包括两个旋转臂,旋转收放装置6中电动缸9通过销轴和旋转臂10连接,旋转臂10和旋转臂11通过螺栓和连接板金8连接,连接篮固定件7和门式架固定,中间嵌有轴承,门式架中旋转臂10和旋转臂11都加装加强筋12提高门式架强度;两组平行四边
形机构的旋转臂在顶端通过两个连接杆对应连接;
31.旋转收放装置6的电动缸9和旋转臂10和旋转臂11通过销轴连接安装在底座4的固定座上。
32.门式架侧面为两个相同的平行四边形结构,其中两个旋转臂的旋转点固定即平行四边形的一边固定,与其相连的两个悬臂长度固定,平行度固定,最后一条由钣金件连接,连接处内嵌轴承保证转动,两组平行四边形机构在最上边通过两个连接杆连接,该平行四边形作用,一保证旋转收放拖体的刚度和强度,二保证证平行四边形最上边的一条边角度恒定即保证拖体限位装置在收放拖体过程中始终保持平行于船体甲板的稳定姿态即保证了拖体姿态稳定。
33.存放篮1用于存放拖体,存放篮1通过螺栓连接固定在底座4中间位置。存放篮1是碳纤维一体成型的框架。
34.绞车装置3通过螺栓连接固定在底座4上。本实施例中,绞车装置采用卧式单卷筒调速拖曳绞车类型,主要包括电机组件、卷筒、底座、丝杆、张力测量装置等部分。
35.拖体限位装置2通过螺栓连接固定在旋转收放装置的门式架上。拖体限位装置采用压缆滚筒,压缆滚筒和连接篮之间加有拉簧,在低速航行拖体回收的时候,压缆滚筒,通过拉簧的拉力使缆垂直甲板,从而保证卡爪及压机翼板限位卡紧拖体的位置准确。
36.如图3,拖体限位装置2中连接篮13通过螺栓连接固定在旋转收放装置6的连接篮固定件7,弹性压缆滚筒14通过螺栓和连接篮13连接,一对压机翼板15通过螺栓连接固定在连接篮13上,弹簧卡爪16和连接篮13下方连接,缆绳滑轮盘18通过螺栓连接固定在连接篮13,拖体17在缆绳一定的拉力下被弹簧卡爪16及一对压机翼板15压限制住。
37.本实用新型采用的是翻转式收放拖体的机构,通过两个同步的电动缸,带动可以旋转的门式架转动,从而实现拖体的收放。
38.本实用新型装置收放拖曳总共有三个过程,分别为拖体布放、拖体拖曳、拖体回收。工作过程及原理如下:
39.拖体的布放:
40.调整至低速稳定航行状态,通过电脑控制软件向电气控制系统发送布放指令,拖曳系统开始工作,动作流程如下:
41.1)收放机构处于存放位,当控制系统收到布放指令,两电缸同步推出,电缸头部与旋转臂一的通过销轴连接,而两悬旋转臂一和旋转臂二通过连接钣金和连接杆组成门式架,所以带动门式架翻转,门式架翻转带动着固定在其上的限位装置及拖体一起翻转,直至到机构的伸出位此时拖体放入水中,翻转停止,在翻转过程中,拖体限位装置采用弹簧卡爪,卡爪与连接篮之间加有两组弹簧,拖体限位卡紧时,弹簧压缩量适中,来保证拖体限位卡紧时,缆绳不至于绷的过紧对缆绳中的光纤芯和电芯造成损害。
42.2)拖体没入水中后,绞车开始放缆2.5米左右,放缆是为了保证机构向上翻转至拖曳位时拖体仍然在水中,然后机构电缸开始回拉,使门式架向上翻转至一定角度至拖曳位,一是为了使拖体限位装置离开水面,二是减少机构拖曳拖体时的受力。
43.3)待机构到达拖曳位置后,绞车开始放缆,直至拖体到达指定深度。
44.拖体拖曳:
45.待拖体布放完成后,船可以开始提速,最终以稳定的航速拖曳拖体进行探测。
46.拖体的回收:
47.回收指令下达,调整至低速稳定航行状态,遥控端向控制系统发送布放指令,拖曳系统开始回收,动作流程如下;
48.1)此时机构处于拖曳位,首先两电缸同步推动,使门式架翻转至伸出位,使拖体限位装置的弹簧卡爪没入水中。
49.2)当机构到达伸出位,绞车开始收揽直至拖体进入拖体限位装置中并收紧至限位亮,此过程中拖体限位装置采用压缆滚筒,压缆滚筒和连接篮之间加有拉簧,在低速航行拖体回收的时候,压缆滚筒,通过拉簧的拉力使缆垂直甲板,从而保证卡爪及压机翼板限位卡紧拖体的位置准确。
50.3)当拖体收紧后,两电缸同步回拉使门式架向上翻转,即带动拖体向上翻转,直到机构到存放位,将拖体放入存放篮。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。