1.本实用新型属于环境监测领域,具体涉及一种园区巡检机器人。
背景技术:
2.国家安全和环保要求的重视,加大防范和遏制重特大事故先进技术装备推广,危险化学品领域重点推广危险化学品便携式多组分气体检测关键技术的要求。很多化工园区配置智能巡检机器人,但仍需要人工手持便携式设备对voc有毒有害气体等相关环境监控,存在安全隐患,本实用新型专利把voc有毒有害气体等环境监测设备集成到智能巡检机器人上,实时上传监测数据,实现超前预测、主动预警,提高园区安全。
技术实现要素:
3.本实用新型目的是通过把环境监测装置集成到智能巡检机器人,实现环境监测设备和智能巡检机器人的联动,实现有毒有害气体监测和环境监测数据的实时上传,危险预警,增加园区安全系数,降低人员的伤害。
4.本实用新型为实现上述目的所采用的技术方案是:一种园区巡检机器人,设于巡检机器人本体上,包括:云台、主控制器以及与主控制器连接的避障模块、气体监测模块、导航系统、无线通信模块、环境监测模块、摄像头;
5.所述主控制器设于巡检机器人本体内,在巡检机器人安装座正前方设有避障模块和导航系统,在巡检机器人本体顶部两侧分别设有气体监测模块和环境监测模块;
6.所述云台设于巡检机器人安装座顶部,所述云台有两个,且分别对称设于巡检机器人安装座顶部两侧,每个云台上均设有摄像头,所述摄像头均与主控制器连接;
7.所述无线通信模块设于巡检机器人本体内,与远程控制终端无线通信。
8.所述避障模块的输出端口轴线方向与巡检机器人本体的前进方向相同;所述避障模块为激光传感器。
9.所述导航系统为slam激光雷达。
10.所述避障模块与导航系统同轴设置,且避障模块设于导航系统下方。
11.所述避障模块的中轴线和导航系统的中轴线均与水平地面垂直。
12.所述气体监测模块为voc有毒有害气体检测仪,所述气体监测模块通过rs485总线与主控制器连接。
13.所述摄像头设于云台上,且摄像头的俯仰角度为:0
°
~180
°
。
14.所述摄像头为双向语音摄像头。
15.所述摄像头为球状摄像头,且转动设于云台上。
16.所述环境监测模块,包括:信号采集板、传感器组、伸缩杆、伸缩旋转电机以及旋转平台;
17.所述传感器组设于旋转平台上;所述传感器组包括:与信号采集板连接的so2传感器、no2传感器、o3传感器、co传感器、pm10传感器、pm2.5传感器、温度传感器以及湿度传感
器任意一种或多种;
18.所述信号采集板与主控制器连接;
19.所述伸缩旋转电机设于巡检机器人本体内,且所述伸缩旋转电机的输出轴与伸缩杆一端连接,所述伸缩杆另一端与旋转平台固连,伸缩旋转电机驱动,带动旋转平台转动;所述伸缩旋转电机通过驱动器与主控制器连接。
20.本实用新型具有以下有益效果及优点:
21.1.本实用新型可以让园区巡检机器人的工作更加的全面,完全实现园区的智能巡检。
22.2.本实用新型通过增加移动式的环境检测模块,减少人员直接暴露在危险环境下的几率,同时,可以实时的上传对应数据,对超标、危险等提前预警和主动预警,降低人伤,增加园区的安全。
23.3.本实用新型包含但不限于不同类型园区的巡检和环境监测,同时,包含但不限于voc有毒有害气体,还包含其他可以监测的环境空气和有毒有害物质的监测。
24.4.本实用新型把voc有毒有害等气体和环境的监测设备集成到智能巡检机器人上,实现远程控制、数据的实时上传和安全预警功能等。
25.5.本实用新型通过增加气体监测设备,固定到巡检机器人上,通过rs485实现气体检测设设备和巡检机器人的通信,再通过无线网络实现园区安全状况和环境现状的实时上传,提前预警等功能。
附图说明
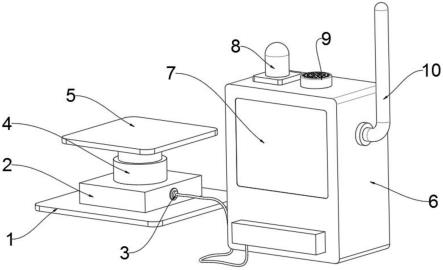
26.图1为本实用新型的装置结构示意图;
27.其中,1为机器人本体,2为避障模块,3为气体监测模块,4导航系统,5为云台,6为环境监测模块;
28.图2为本实用新型的系统框架图。
具体实施方式
29.下面结合附图及实施例对本实用新型做进一步的详细说明。
30.如图1和图2所示,为本实用新型的装置结构示意图;一种园区巡检机器人,设于巡检机器人本体上,包括:云台、主控制器以及与主控制器连接的避障模块、气体监测模块、导航系统、无线通信模块、环境监测模块、摄像头;
31.所述主控制器设于巡检机器人本体内,在巡检机器人安装座正前方设有避障模块和导航系统,在巡检机器人本体顶部两侧分别设有气体监测模块和环境监测模块;
32.所述云台设于巡检机器人安装座顶部,所述云台有两个,且分别对称设于巡检机器人安装座顶部两侧,每个云台上均设有摄像头,所述摄像头均与主控制器连接;
33.所述无线通信模块设于巡检机器人本体内,与远程控制终端无线通信。
34.本实用新型采用现有的巡检机器人,实现了园区的人员行为监测、车辆监测等智能巡检。主要是控制和动力功能,完成和远程控制终端的通信、数据交互以及车的运行。
35.巡检机器人本体的机构描述:由巡检机器人底盘、直流无刷电机、控制系统和电池组成,电池为控制系统和电机的提供电源,带动巡检机器人的移动。
36.避障模块主要选用激光传感器,是一种可以探测物体精确位置的传感器,主要通过对目标物发射激光信号,再根据从物体反射回来的信号时间差来计算这段距离,然后再发射激光的角度来确定物体和发射器的角度,从而得出物体与发射器的相对位置。
37.避障模块的输出端口轴线方向与巡检机器人本体的前进方向相同。
38.导航系统主要选用激光slam导航,采用slam激光雷达,即同步定位与建图,通过机器人的运动模型得到机器人的位姿初估计,然后通过机器人装载的激光传感器获取的激光数据结合观测模型(激光的扫描匹配)对机器人位姿进行精确修正,得到机器人的精确定位,较后在精确定位的基础上,将激光数据添加到栅格地图中,反复如此,机器人在环境中运动,较终完成整个场景地图的构建。在完成场景地图构建后,需要在所构建的地图基础上进行基于地图的位置和路径规划来实现机器人的导航。slam激光导航机器人运动过程中,通过里程计信息结合激光传感器获取的激光数据与地图进行匹配,不断地实时获取机器人在地图中的精确位姿,同时,根据当前位置与任务目的地进行路径规划(动态路线或者固定路线,且每次的路线都略微不同),根据规划得到的轨迹给机器人发送控制指令,使机器人实现自动行驶。
39.避障模块与导航系统同轴设置,且避障模块设于导航系统下方。避障模块的中轴线和导航系统的中轴线均与水平地面垂直。
40.所述气体监测模块为voc有毒有害气体检测仪,所述气体监测模块通过rs485总线与主控制器连接。
41.摄像头设于云台上,且摄像头的俯仰角度为:0
°
~180
°
。
42.摄像头为双向语音摄像头。由高清夜视广角摄像头和双目摄像头构成,具有环境实时拍摄、识别和监测功能,可实现就地或远程视频巡视功能。
43.摄像头为球状摄像头,且转动设于云台上。
44.环境监测模块,包括:信号采集板、传感器组、伸缩杆、伸缩旋转电机以及旋转平台;
45.传感器组设于旋转平台上;传感器组包括:与信号采集板连接的so2传感器、no2传感器、o3传感器、co传感器、pm10传感器、pm2.5传感器、温度传感器以及湿度传感器任意一种或多种;
46.信号采集板与主控制器连接;
47.伸缩旋转电机设于巡检机器人本体内,且所述伸缩旋转电机的输出轴与伸缩杆一端连接,所述伸缩杆另一端与旋转平台固连,伸缩旋转电机驱动,带动旋转平台转动;所述伸缩旋转电机通过驱动器与主控制器连接。
48.如图2所示,为本实用新型的系统框架图,本实用新型在化工园区的厂区巡检机器人中应用。通过巡检机器搭载voc有毒有害气体监测模块和环境监测模块,实现整个化工园区无人化的实时在线监测,对超标、危险等提前预警和主动预警,降低人伤,增加园区的安全。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。