1.本实用新型涉及测量设备技术领域,具体涉及一种自动扫描测量设备。
背景技术:
2.目前运载火箭燃料贮箱底是由8个瓜瓣、1个顶盖、1个过渡环焊接在一起,“拼接”成最终的形状。瓜瓣在成型过程中会有一定的误差,最终导致贮箱底在焊接时出现复合偏差,为了得出瓜瓣实际偏差数值,所以需要开发瓜瓣自动化扫描测量设备。
技术实现要素:
3.本实用新型的目的是提供一种自动扫描测量设备,用以解决现有技术中存在的至少一个上述问题。
4.为了实现上述目的,本实用新型采用以下技术方案:
5.一种自动扫描测量设备,包括扫描工作区,所述扫描工作区内设有旋转底座,所述旋转底座上设有用于安装瓜瓣零件的定位工装,所述旋转底座的一侧设有机器人台座,所述机器人台座上设有六轴机器人,所述六轴机器人上设有三维空间扫描仪;
6.所述机器人台座驱动六轴机器人移动的方向包括第一移动方向和第二移动方向,所述六轴机器人沿着第一移动方向移动可以实现六轴机器人与瓜瓣零件之间的水平距离的调整,所述六轴机器人沿着第二移动方向移动可以实现六轴机器人与瓜瓣零件之间高度距离的调整;
7.所述机器人台座的一侧设有直线驱动机构,所述直线驱动机构上设有c-track光学跟踪器,所述直线驱动机构驱动c-track光学跟踪器沿着第三移动方向移动,所述c-track光学跟踪器沿着第三移动方向移动可以实现c-track光学跟踪器与瓜瓣零件之间水平距离的调整;
8.所述定位工装的上方设有单轴机器人,所述单轴机器人上设有c-track光学跟踪器,所述单轴机器人的移动方向与第一移动方向平行。
9.本技术方案中,旋转底座能够围绕其中心进行自旋转,由于定位工装安装在旋转底座上,因此,通过旋转底座的转动能够实现对定位工装的转动,进而,安装在定位工装上的瓜瓣零件也能够实现360度的自由转动,从而能够更好的为三维空间扫描仪及c-track光学跟踪器进行全方位的扫描提供方便。
10.机器人台座和直线驱动机构的设置,机器人台座能够实现对六轴机器人的位置的调整,具体的包括第一移动方向的调整和第二移动方向的调整,第一移动方向的调整可以实现六轴机器人与瓜瓣零件之间水平距离的调整,第二移动方向的调整可以实现六轴机器人与瓜瓣零件之间高度距离的调整,从而实现了对六轴机器人的灵活位置调整,以便六轴机器人驱动三维空间扫描仪对瓜瓣零件进行全面扫描。
11.由于机器人台座的一侧设有直线驱动机构,直线驱动机构上设有c-track光学跟踪器,c-track光学跟踪器沿着第三移动方向移动可以实现c-track光学跟踪器与瓜瓣零件
之间水平距离的调整,通过c-track光学跟踪器沿着第三方向的移动可以从侧向实现对瓜瓣零件上靶点的快速定位,与此同时,单轴机器人上的c-track光学跟踪器能够从瓜瓣零件的上方在水面方向上实现对瓜瓣零件上靶点的快速定位,通过从不同方向上对瓜瓣零件上靶点的扫描,以便实现空间坐标系的建立,之后便于三维空间扫描仪对瓜瓣零件进行三维空间全面扫描。
12.综上,本设计,从对瓜瓣零件的定位、转动、以及三维空间扫描仪、c-track光学跟踪器的配合移动,为目前如何实现对瓜瓣零件进行自动化扫描提供完整的解决方案,从而解决了目前无法得出瓜瓣实际偏差数值的问题。
13.需要说明的是,六轴机器人较优的选择库卡六轴机器人,由于测量瓜瓣零件,较大瓜瓣零件的半径达到2.5米,选用机械臂的人时候必须预留行程。
14.进一步的,为了定位工装与瓜瓣零件进行形状的匹配,以便能够更好的实现对瓜瓣零件的定位且不影响对瓜瓣零件的扫描,所述定位工装包括底部支架,所述底部支架可拆卸式固定安装在旋转底座上,所述底部支架上设有高度支撑架,所述高度支撑架上设有支撑座,所有支撑座的支撑点之间的连线与瓜瓣零件的外形弧度适配。
15.进一步的,为了保证扫描作业的安全性,避免非本设备操作员进入扫描工作区内,出现安全事故,所述扫描工作区的外侧设有防护围栏,所述防护围栏的一侧设有吊装出入口,吊装出入口用于吊装瓜瓣零件,所述吊装出入口处设有安全光栅,安全光栅的设置,以防非相关人员误闯到扫描工作区内发生安全事故。
16.需要说明的是,防护围栏内要求配置照明设备,监控设备。方便操作人员观看扫描工作区内的实际情况。
17.进一步的,为了进一步提升设备使用的安全性,并方便及时发现扫描工作区内的情况,所述防护围栏上还设有应急安全门和可视观察窗,所述可视观察窗可采用防爆玻璃。
18.进一步的,为了适配不用型号的瓜瓣零件,所述定位工装包括与第一种瓜瓣零件匹配的第一定位工装、与第二种瓜瓣零件匹配的第二定位工装和与第三种瓜瓣零件匹配的第三定位工装。
19.需要说明的是,目前瓜瓣零件的具体型号有2250(直径2.25米)、3350(直径3.35米)及5000(直径5米)三种瓜瓣零件。因此分别设计三种尺寸的定位工装,以便与不同型号的瓜瓣零件进行匹配安装。
20.进一步的,为了实现对六轴机器人在x轴方向和z轴方向的驱动,所述机器人台座包括x轴移动机构和z轴移动机构,所述z轴移动机构设置在x轴移动机构上,所述六轴机器人设置在z轴移动机构上,所述x轴移动机构和z轴移动机构分别驱动六轴机器人沿着第一移动方向和第二移动方向移动。
21.进一步的,为了更好的实现传动效果,所述x轴移动机构和z轴移动机构均为丝杠传动机构。
22.进一步的,为了更好的实现对位于瓜瓣零件上方的c-track光学跟踪器的驱动,所述单轴机器人包括对称设置在旋转底座两侧的行走轨道,所述行走轨道之间设有行走架,所述行走架的两端设有移动座,所述移动座上设有行走轮,任一移动座上设有驱动行走轮转动的行走驱动机构。
23.具体的,行走驱动机构包括设置在任一移动座上的电机,所述电机与输出轴与行
走轮之间传动连接。
24.进一步的,为了提供一种具体的旋转底座,所述旋转底座包括中心支撑部、转盘和用于驱动转盘围绕中心支撑部转动的转动驱动机构,所述中心支撑部和转盘之间通过轴承转动配合。
25.进一步的,为了更好的实现转盘的平稳转动,同时实现对转盘的有效支撑,所述转盘的下方设有支撑机构,所述支撑机构包括若干个支撑架,所述支撑架的上端转动连接有滚轮,所述滚轮与转盘滚动配合。
26.本实用新型的有益效果为:本技术方案中,旋转底座能够围绕其中心进行自旋转,由于定位工装安装在旋转底座上,因此,通过旋转底座的转动能够实现对定位工装的转动,进而,安装在定位工装上的瓜瓣零件也能够实现360度的自由转动,从而能够更好的为三维空间扫描仪及c-track光学跟踪器进行全方位的扫描提供方便。
27.机器人台座和直线驱动机构的设置,机器人台座能够实现对六轴机器人的位置的调整,具体的包括第一移动方向的调整和第二移动方向的调整,第一移动方向的调整可以实现六轴机器人与瓜瓣零件之间水平距离的调整,第二移动方向的调整可以实现六轴机器人与瓜瓣零件之间高度距离的调整,从而实现了对六轴机器人的灵活位置调整,以便六轴机器人驱动三维空间扫描仪对瓜瓣零件进行全面扫描。
28.由于机器人台座的一侧设有直线驱动机构,直线驱动机构上设有c-track光学跟踪器,c-track光学跟踪器沿着第三移动方向移动可以实现c-track光学跟踪器与瓜瓣零件之间水平距离的调整,通过c-track光学跟踪器沿着第三方向的移动可以从侧向实现对瓜瓣零件上靶点的快速定位,与此同时,单轴机器人上的c-track光学跟踪器能够从瓜瓣零件的上方在水面方向上实现对瓜瓣零件上靶点的快速定位,通过从不同方向上对瓜瓣零件上靶点的扫描,以便实现空间坐标系的建立,之后便于三维空间扫描仪对瓜瓣零件进行三维空间全面扫描。
29.综上,本设计,从对瓜瓣零件的定位、转动、以及三维空间扫描仪、c-track光学跟踪器的配合移动,为目前如何实现对瓜瓣零件进行自动化扫描提供完整的解决方案,从而解决了目前无法得出瓜瓣实际偏差数值的问题。
附图说明
30.图1为本实用新型第一视角的立体结构示意图;
31.图2为本实用新型的俯视结构示意图;
32.图3为本实用新型使用状态的第一视角立体结构示意图;
33.图4为本实用新型使用状态的第二视角立体结构示意图;
34.图5为本实用新型使用状态的第三视角立体结构示意图;
35.图6为本实用新型使用状态的俯视结构示意图;
36.图7为图6中a-a处的剖视图;
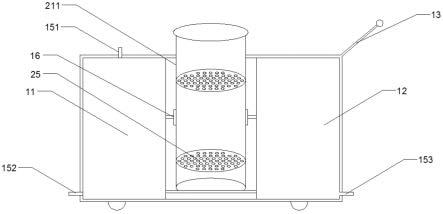
37.图8为本实用新型使用状态的主视结构示意图;
38.图9为本实用新型使用状态的侧视结构示意图。
39.图中:扫描工作区1;旋转底座2;定位工装3;瓜瓣零件4;机器人台座5;六轴机器人6;三维空间扫描仪7;直线驱动机构8;c-track光学跟踪器9;底部支架10;高度支撑架11;支
撑座12;防护围栏13;吊装出入口14;安全光栅15;x轴移动机构16;z轴移动机构17;行走轨道18;行走架19;移动座20;中心支撑部21;转盘22;轴承23;旋转圈24;支撑架25;滚轮26;齿轮27。
具体实施方式
40.实施例1:
41.如图1-图9所示,本实施例提供一种自动扫描测量设备,包括扫描工作区1,扫描工作区1内设有旋转底座2,旋转底座2上设有用于安装瓜瓣零件4的定位工装3,旋转底座2的一侧设有机器人台座5,机器人台座5上设有六轴机器人6,六轴机器人6上设有三维空间扫描仪7;
42.机器人台座5驱动六轴机器人6移动的方向包括第一移动方向和第二移动方向,六轴机器人6沿着第一移动方向移动可以实现六轴机器人6与瓜瓣零件4之间的水平距离的调整,六轴机器人6沿着第二移动方向移动可以实现六轴机器人6与瓜瓣零件4之间高度距离的调整;
43.机器人台座5的一侧设有直线驱动机构8,直线驱动机构8上设有c-track光学跟踪器9,直线驱动机构8驱动c-track光学跟踪器9沿着第三移动方向移动,c-track光学跟踪器9沿着第三移动方向移动可以实现c-track光学跟踪器9与瓜瓣零件4之间水平距离的调整;具体的,直线驱动机构8可以是丝杆驱动机构,通过电机驱动丝杆转动,配合滑块实现对该c-track光学跟踪器9的直线驱动,从而调整c-track光学跟踪器9与瓜瓣零件4之间的水平距离。
44.定位工装3的上方设有单轴机器人,单轴机器人上设有c-track光学跟踪器9,单轴机器人的移动方向与第一移动方向平行。
45.本技术方案中,旋转底座2能够围绕其中心进行自旋转,由于定位工装3安装在旋转底座2上,因此,通过旋转底座2的转动能够实现对定位工装3的转动,进而,安装在定位工装3上的瓜瓣零件4也能够实现360度的自由转动,从而能够更好的为三维空间扫描仪7及c-track光学跟踪器9进行全方位的扫描提供方便。
46.机器人台座5和直线驱动机构8的设置,机器人台座5能够实现对六轴机器人6的位置的调整,具体的包括第一移动方向的调整和第二移动方向的调整,第一移动方向的调整可以实现六轴机器人6与瓜瓣零件4之间水平距离的调整,第二移动方向的调整可以实现六轴机器人6与瓜瓣零件4之间高度距离的调整,从而实现了对六轴机器人6的灵活位置调整,以便六轴机器人6驱动三维空间扫描仪7对瓜瓣零件4进行全面扫描。
47.由于机器人台座5的一侧设有直线驱动机构8,直线驱动机构8上设有c-track光学跟踪器9,c-track光学跟踪器9沿着第三移动方向移动可以实现c-track光学跟踪器9与瓜瓣零件4之间水平距离的调整,通过c-track光学跟踪器9沿着第三方向的移动可以从侧向实现对瓜瓣零件4上靶点的快速定位,与此同时,单轴机器人上的c-track光学跟踪器9能够从瓜瓣零件4的上方在水面方向上实现对瓜瓣零件4上靶点的快速定位,通过从不同方向上对瓜瓣零件4上靶点的扫描,以便实现空间坐标系的建立,之后便于三维空间扫描仪7对瓜瓣零件4进行三维空间全面扫描。
48.综上,本设计,从对瓜瓣零件4的定位、转动、以及三维空间扫描仪7、c-track光学
跟踪器9的配合移动,为目前如何实现对瓜瓣零件4进行自动化扫描提供完整的解决方案,从而解决了目前无法得出瓜瓣实际偏差数值的问题。
49.需要说明的是,六轴机器人6较优的选择库卡六轴机器人,由于测量瓜瓣零件4,较大瓜瓣零件4的半径达到2.5米,选用机械臂的时候必须预留行程。
50.实施例2:
51.本实施例是在上述实施例1的基础上进行优化。
52.为了定位工装3与瓜瓣零件4进行形状的匹配,以便能够更好的实现对瓜瓣零件4的定位且不影响对瓜瓣零件4的扫描,定位工装3包括底部支架10,底部支架10可拆卸式固定安装在旋转底座2上,底部支架10上设有高度支撑架11,高度支撑架11上设有支撑座12,所有支撑座12的支撑点之间的连线与瓜瓣零件4的外形弧度适配。
53.需要说明的是,支撑座12与瓜瓣零件4接触的一侧可以设计为弧形边,以便更好的实现对瓜瓣零件4的支撑定位。
54.实施例3:
55.本实施例是在上述实施例2的基础上进行优化。
56.为了保证扫描作业的安全性,避免非本设备操作员进入扫描工作区1内,出现安全事故,扫描工作区1的外侧设有防护围栏13,防护围栏13的一侧设有吊装出入口14,吊装出入口14用于吊装瓜瓣零件4,吊装出入口14处设有安全光栅15,安全光栅15的设置,以防非相关人员误闯到扫描工作区1内发生安全事故。
57.需要说明的是,防护围栏13内要求配置照明设备,监控设备。方便操作人员观看扫描工作区1内的实际情况。
58.实施例4:
59.本实施例是在上述实施例3的基础上进行优化。
60.为了进一步提升设备使用的安全性,并方便及时发现扫描工作区1内的情况,防护围栏13上还设有应急安全门和可视观察窗,可视观察窗可采用防爆玻璃。
61.实施例5:
62.本实施例是在上述实施例4的基础上进行优化。
63.为了适配不用型号的瓜瓣零件4,定位工装3包括与第一种瓜瓣零件匹配的第一定位工装、与第二种瓜瓣零件匹配的第二定位工装和与第三种瓜瓣零件匹配的第三定位工装。
64.需要说明的是,目前瓜瓣零件4的具体型号有2250(直径2.25米)、3350(直径3.35米)及5000(直径5米)三种瓜瓣零件4。因此分别设计三种尺寸的定位工装3,以便与不同型号的瓜瓣零件4进行匹配安装。
65.实施例6:
66.本实施例是在上述实施例5的基础上进行优化。
67.为了实现对六轴机器人6在x轴方向和z轴方向的驱动,机器人台座5包括x轴移动机构16和z轴移动机构17,z轴移动机构17设置在x轴移动机构16上,六轴机器人6设置在z轴移动机构17上,x轴移动机构16和z轴移动机构17分别驱动六轴机器人6沿着第一移动方向和第二移动方向移动。
68.实施例7:
69.本实施例是在上述实施例6的基础上进行优化。
70.为了更好的实现传动效果,x轴移动机构16和z轴移动机构17均为丝杠传动机构。
71.通过电机驱动丝杆转动,配合滑块实现对六轴机器人6的驱动,从而调整六轴机器人6与瓜瓣零件4之间的水平距离和垂直距离。
72.实施例8:
73.本实施例是在上述实施例7的基础上进行优化。
74.为了更好的实现对位于瓜瓣零件4上方的c-track光学跟踪器9的驱动,单轴机器人包括对称设置在旋转底座2两侧的行走轨道18,行走轨道18之间设有行走架19,行走架19的两端设有移动座20,移动座20上设有行走轮,任一移动座20上设有驱动行走轮转动的行走驱动机构。
75.具体的,行走驱动机构包括设置在任一移动座20上的电机,电机与输出轴与行走轮之间传动连接。
76.实施例9:
77.本实施例是在上述实施例8的基础上进行优化。
78.为了提供一种具体的旋转底座2,旋转底座2包括中心支撑部21、转盘22和用于驱动转盘22围绕中心支撑部21转动的转动驱动机构,中心支撑部21和转盘22之间通过轴承23转动配合。具体的,转动驱动机构包括设置在转盘22下方的电机,所述电机的输出轴上设有齿轮27,所述转盘22上设有与齿轮27啮合的旋转圈24,通过齿轮27的转动实现对旋转圈24的驱动,从而实现对转盘22的驱动。
79.实施例10:
80.本实施例是在上述实施例9的基础上进行优化。
81.为了更好的实现转盘22的平稳转动,同时实现对转盘22的有效支撑,转盘22的下方设有支撑机构,支撑机构包括周向均匀设置在转盘22下方的若干个支撑架25,支撑架25的上端转动连接有滚轮26,滚轮26与转盘22滚动配合。
82.本技术方案,根据三种不同瓜瓣零件4设计出与瓜瓣零件4匹配的定位工装3,定位工装3根据具体瓜瓣零件4的形状、尺寸进行适应性的调整,定位工装3最终放置在旋转底座2上。需要把瓜瓣零件4放置在定位工装3上进行扫描,最终整合扫描数据,得出扫描测量结果。机器人扫描测量系统由库卡六轴机器人上配置三维空间扫描仪7进行零件扫描,瓜瓣扫描使用c-track跟踪。
83.本自动化扫描测量设备占地面积约长10米、宽8米、高5米。
84.该设备完全实现自动化,设计防护栏隔离等措施,确保零安全风险,工位操作通过远程控制,遇到异常情况自动报警停机。
85.本设备的使用工作流程
86.1、将需要测量对应型号的瓜瓣零件4的对应定位工装3装入旋转底座2上并锁紧。
87.2、调用对应瓜瓣零件4的测量程序。
88.3、将被测瓜瓣零件4装入到定位工装3上,适当的调整瓜瓣零件4,让瓜瓣零件4定位在定位工装3上。
89.4、单轴机器人和直线驱动机构8携带c-track光学跟踪器9先扫描设备中的靶点,建立空间坐标系。
90.5、六轴机器人6再驱动三维空间扫描仪7再扫描被测瓜瓣零件4,直到瓜瓣零件4完全扫描完成。
91.6、与本设备配套的检测比对分析软件,通过将扫描结果跟产品数据进行数据拟合,计算出偏差值。
92.7、与本设备配套使用的检测比对分析软件生成测量报告,并把测量报告及瓜瓣零件4扫描数据传送到对应的其他设备上。
93.8、系统程序控制机器人、三维空间扫描仪7、c-track光学跟踪器9归到原位。
94.9、把对应瓜瓣零件4吊出扫描工作区1,转移到下一工序。
95.需要说明的是,与本设备的使用配套的检测比对分析软件属于现有设计,为对应的三维空间扫描仪7和c-track光学跟踪器9厂家配套提供的检测比对分析软件。例如,geomagic control检测比对分析软件,该软件几分钟之内,即可实现三维扫描数据与原始数模之间进行比对检测分析,最佳拟合对齐(基准,rps等)、3d比对、颜色色谱注释、2d尺寸、gd&t和出具报告等。
96.最后应说明的是:以上仅为本实用新型的优选实施例而已,并不用于限制本实用新型的保护范围。凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。