1.本技术涉及猎枪支架的领域,尤其是涉及一种猎枪支架用高稳定性支腿角度解锁机构。
背景技术:
2.猎枪支架一般为三角支架,包括连接座,连接座上转动设置有三个支腿,连接座上设置有用于支撑猎枪的支撑组件,支腿与连接座通过螺栓螺母连接,并且通过锁紧螺栓螺母增大支腿和连接座之间的摩擦力进而形成一个阻尼转动。使用时同步转动打开支腿,支腿通过自身与连接座的摩擦力自锁完成打开。
3.针对上述中的相关技术,发明人认为仅靠自身摩擦力完成自锁对支腿进行固定,使用时稳定性不佳。
技术实现要素:
4.为了提高支腿打开后的稳定性,本技术提供一种猎枪支架用高稳定性支腿角度解锁机构。
5.本技术提供的一种猎枪支架用高稳定性支腿角度解锁机构采用如下的技术方案:
6.一种猎枪支架用高稳定性支腿角度解锁机构,包括连接座,所述连接座上转动连接有三个支腿,所述连接座上同轴套设转动环,所述转动环沿自身轴向转动设置,所述连接座位于所述转动环轴向的一端设置有用于限制所述转动环沿自身轴向移动的限位环,所述连接座位于所述转动环轴向另一端设置有用于限制所述转动环沿自身轴向移动的安装块,所述转动环下端位于所述支腿处开设有供所述支腿打开的第一限位缺口和第二限位缺口,所述第一限位缺口和所述第二限位缺口并列在一起,并且所述第一限位缺口高于所述第二限位缺口。
7.通过采用上述技术方案,当需要打开支腿时转动使得第一限位缺口或者第二限位缺口位于支腿处,而后转动打开支腿,支腿打开后与第一限位缺口或者第二限位缺口抵接,进而对自身的开合最大角进行限位,进而提高支腿打开后的稳定性。
8.可选的,所述转动环靠近连接座的一侧壁上设置有限位块,所述连接座上设置有限位槽,所述限位块位于所述限位槽中滑动;当所述限位块位于所述限位槽一端时,所述第一限位缺口位于所述支腿处,当所述限位块位于所述限位槽另一端时,所述第二限位缺口位于所述支腿处。
9.通过采用上述技术方案,通过限位槽对限位块进行限位,进而对转动环的转动角度进行限位,使得转动环正反向转动到到底时,第一限位缺口和第二限位缺口必有一个位于支腿处,进而在转动转动环时无需通过肉眼观察对齐支腿、第一限位缺口和第二限位缺口,便于进行盲操,进而提高了操作的便捷性。
10.可选的,所述限位槽和所述限位块之间连接设置有弹性伸缩件,所述弹性伸缩件拉动所述限位块抵接到所述限位槽的一端,并且此时所述第二限位缺口位于所述支腿处。
11.通过采用上述技术方案,弹性伸缩件的弹性回复力拉动第二限位缺口与支腿对齐,降低了支腿通过第二限位缺口限位打开后转动环意外转动滑脱使得第一限位缺口和支腿对齐的可能性,进而提高了第二限位缺口限位的稳定性;并且在实际使用时,若操作人员未转动转动环,第二限位缺口始终与支腿对齐,直接打开支腿即可通过第二限位缺口进行限位,操作人员转动转动环才驱使第一限位缺口与支腿对齐,而后打开支腿并通过第一限位缺口进行限位,进而进一步提高了盲操的便捷性。
12.可选的,所述限位槽为三个,三个所述限位槽设置于所述支腿间隔之间,所述限位块对应设置为三个,所述弹性伸缩件对应设置为三个。
13.通过采用上述技术方案,通过对应设置的三个限位槽,限位块和弹性伸缩件配合进行限位转动,提高了限位的稳定性。
14.可选的,所述转动环上刻设有指示箭头,所述指示箭头指向所述弹性伸缩件拉伸的方向。
15.通过采用上述技术方案,当转动转动环时,根据指示箭头的指示进行转动,进一步提高了转动环转动操作的便捷性。
16.可选的,所述转动环上设置有多个便于调节支腿转轴处松紧的操作窗。
17.通过采用上述技术方案,当需要调节支腿转轴处转动阻力时,通过操作窗将工具伸入进行调节,操作方便快捷。
18.可选的,所述第一限位缺口和所述第二限位缺口之间圆滑过渡。
19.通过采用上述技术方案,当操作人员转动转动环没有完全到位时,通过圆滑过渡处抵触支腿驱使转动环转动进而使得支腿被限位到第一限位缺口中,操作方便快捷。
20.可选的,所述转动环上设置有多个用于增大自身与人手摩擦力的防滑凹槽。
21.通过采用上述技术方案,当操作人员通过转动环转动转动环时,通过防滑凹槽增大自身手掌和转动环之间的摩擦力,降低了手掌转动转动环时滑脱的可能性,对手掌起到良好的保护所用。
22.综上所述,本技术包括以下至少一种有益技术效果:
23.1.通过设置转动环,并在转动环上设置并列的第一限位缺口和第二限位缺口,转动打开支腿时,通过第一限位缺口或者第二限位缺口对支腿进行限位,进而提高支腿打开后的稳定性;
24.2.通过设置限位槽和限位块,并使限位块在限位槽中滑动,对转动环的转动角度进行限位,使得转动环正反向转动到到底时,第一限位缺口和第二限位缺口必有一个位于支腿处,便于进行盲操;
25.3.通过设置弹性伸缩件,并使弹性伸缩件拉动限位块抵接到限位槽的一端,并且此时第二限位缺口位于支腿处,进而使得未转动转动环时,第二限位缺口和支腿对齐并限位,转动转动环后第一限位缺口和支腿进行对齐并限位。
附图说明
26.图1是本技术实施例一的猎枪支架用高稳定性支腿角度解锁机构的整体结构示意图。
27.图2是本技术实施例一的猎枪支架用高稳定性支腿角度解锁机构为突出显示安装
块处的结构示意图。
28.图3是本技术实施例一的猎枪支架用高稳定性支腿角度解锁机构未显示安装块的结构示意图。
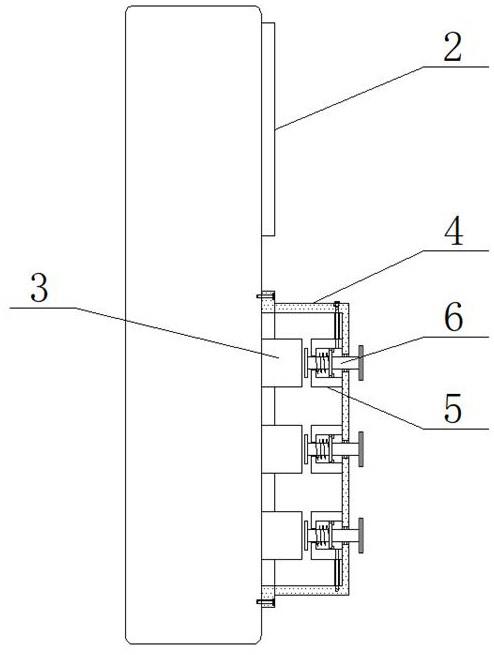
29.图4是图3中a部的放大示意图。
30.附图标记说明:
31.1、连接座;2、支腿;3、转动环;4、限位环;5、安装块;6、第一限位缺口;7、第二限位缺口;8、限位块;9、限位槽;10、弹性伸缩件;11、指示箭头;12、防滑凹槽;13、操作窗。
具体实施方式
32.以下结合附图1-4对本技术作进一步详细说明。
33.本技术实施例公开一种猎枪支架用高稳定性支腿角度解锁机构。参照图1,猎枪支架用高稳定性支腿角度解锁机构包括连接座1,连接座1的边侧转动连接有三个支腿2,三个支腿2呈环形阵列分布,支腿2与连接座1通过螺栓螺母连接,并且支腿2沿螺栓转轴转动实现开合,转动动螺母调节连接座1和支腿2之间的压紧力,进而调节支腿2转动阻尼。
34.参照图1和图2,连接座1上同轴设置有转动环3,转动环3沿自身轴向转动套设在连接座1外侧,并且连接座1位于转动环3的上端设置有限位环4,限位环4沿竖直方向绕连接座1一周设置并且和连接座1一体成型,限位环4抵触在转动环3朝上的一侧壁上。连接座1位于转动环3下端设置有安装块5,安装块5通过螺栓拆卸连接在连接座1上,并且安装块5抵触在转动环3朝下的一侧壁上。通过限位环4和安装块5位于转动环3上下两端对其进行夹持限位,限制了转动环3沿自身轴向移动的可能性。
35.转动环3下端位于支腿2处开设有供支腿2打开的第一限位缺口6和第二限位缺口7,第一限位缺口6和第二限位缺口7并列设置且连通,并且第一限位缺口6开设的高度高于第二限位缺口7开设的高度。第一限位缺口6和第二限位缺口7之间圆滑过渡。两个连接在一起的第一限位缺口6和第二限位缺口7为一组,本技术实施例中共计有三组上述第一限位缺口6和第二限位缺口7的组合,且该组合沿连接座1轴线呈环形阵列分布,并且该组合与三个支腿2一一对应。转动转动环3使得第一限位缺口6与支腿2对齐,进而通过第一限位缺口6对支腿2最大开合角进行限位,并且转动转动环3使得第二限位缺口7与支腿2对齐,进而通过第二限位缺口7对支腿2最大开合角进行限位,操作方便快捷,提高了支腿2打开后的稳定性。
36.参照图3和图4,转动环3靠近连接座1的一侧壁上设置有限位块8,限位块8有三个,三个限位块8沿转动环3轴线呈环形阵列分布,连接座1上设置有三个限位槽9,三个限位槽9沿连接座1轴线呈环形阵列分布,并且限位槽9呈弧形,并且三个限位块8跟随转动环3转动时分别在限位槽9中滑动。当限位块8位于限位槽9一端时,第一限位缺口6位于支腿2处,当限位块8位于限位槽9另一端时,第二限位缺口7位于支腿2处。限位槽9对限位块8进行限位,使得转动环3实现一个往复的转动,并且转动环3转动到两端时第一限位缺口6和第二限位缺口7分别对支腿2进行限位,进而提高了转动环3转动限位的便捷性。
37.限位槽9和限位块8之间连接设置有弹性伸缩件10,本技术实施例的弹性伸缩件10可以为伸缩弹簧,伸缩弹簧两端通过螺栓分别与限位槽9和限位块8固定连接。弹性伸缩件10拉动限位块8抵接到限位槽9的一端,并且在限位块8被拉至限位槽9的一端时第二限位缺
口7与支腿2对齐。通过弹性伸缩件10使得转动环3在无外力加持转动时,第二限位缺口7与支腿2对齐,并且此时限位块8位于限位槽9的一端,转动时限位块8只能朝向限位槽9另一端转动,并且在转动到另一端后第一限位缺口6与支腿2对齐,进而进一步提高了转动环3转动限位的便捷性。
38.参照图1,转动环3上刻设有指示箭头11,指示箭头11水平指向弹性伸缩件10拉伸的方向,本技术实施例的指示箭头11可以为三个,三个指示箭头11沿转动环3轴线呈环形阵列分布。通过指示箭头11表示操作人员转动环3手动转动的方向,便于操作人员对转动环3进行转动。
39.转动环3上设置有多个用于增大自身与人手摩擦力的防滑凹槽12,防滑凹槽12绕转动环3转动方向的一周布设,防滑凹槽12沿转动环3轴线呈环形阵列分布。操作人员通过防滑凹槽12转动转动环3,转动时不易滑脱。
40.转动环3上设置有多个便于调节支腿2转轴处松紧的操作窗13,本技术实施例的操作窗13可以为三个,三个操作窗13分别对准支腿2与连接座1连接的螺母处。操作人员将工具从操作窗13伸入对螺母进行松紧,便于调节支腿2转轴处的松紧。
41.本技术实施例一种猎枪支架用高稳定性支腿角度解锁机构的实施原理为:当操作人员未转动转动块时,弹性伸缩件10的弹性回复力驱使限位块8位于限位槽9的一端,此时第二限位缺口7与支腿2对齐,转动支腿2打开,支腿2被第二限位缺口7限位;若要通过第一限位缺口6对支腿2进行限位,则先根据指示箭头11方向转动转动块驱使限位块8移动到限位槽9的另一端,此时不松开转动块,并转动打开三个支腿2,支腿2即可被第一限位缺口6进行限位。
42.以上均为本技术的较佳实施例,并非依此限制本技术的保护范围,故:凡依本技术的结构、形状、原理所做的等效变化,均应涵盖于本技术的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。