基于bim的刚性接触网无轨施工装置
技术领域
1.本实用新型属于无轨施工技术领域,具体涉及基于bim的刚性接触网无轨施工装置。
背景技术:
2.接触网在轨道交通建设中是不可或缺的组成部分,轨道交通通过接触网向车厢内部传递电能。现行主流接触网施工分为柔性接触网及刚性接触网施工。柔性接触网的空间利用率低下,结构复杂,对于地铁隧道净空较低,空间狭小等特点不能良好适应,因此更多地被运用于火车等地上铁路的建设环节中。刚性接触网组件简单,占用空间较小,符合地铁建设要求,然而市面上出现的基于bim的刚性接触网无轨施工装置仍存在各种各样的不足,不能够满足生产的需求。
3.现有的接触网施工需先经历洞通,轨通等过程,对于重型机械的利用率低下,人员调动能力不足,场面布置混乱,既耽搁了施工进度,又无法做到资源的合理分配,加重财政支出,机械操作自动化程度低,装配精准低,安装点坐标误差大,提高了人为操作失误的可能性,降低了施工可靠度的问题,为此我们提出基于bim的刚性接触网无轨施工装置。
技术实现要素:
4.本实用新型的目的在于提供基于bim的刚性接触网无轨施工装置,以解决上述背景技术中提出基于bim的刚性接触网无轨施工装置,接触网施工需先经历洞通,轨通等过程,对于重型机械的利用率低下,人员调动能力不足,场面布置混乱,既耽搁了施工进度,又无法做到资源的合理分配,加重财政支出,机械操作自动化程度低,装配精准低,安装点坐标误差大,提高了人为操作失误的可能性,降低了施工可靠度的问题。
5.为实现上述目的,本实用新型提供如下技术方案:基于bim的刚性接触网无轨施工装置,包括车架行进系统(1),所述车架行进系统(1)的上端从左至右分别固定连接有栏杆(2)、电子显示器(4)和矩形底座外包件(13),所述矩形底座外包件(13)的上端活动连接有球体座(5),所述球体座(5)的上端固定连接有网架型升降杆(6),所述网架型升降杆(6)的上端活动连接有安装臂手连接平台(10),所述安装臂手连接平台(10)的上端固定连接有电钻滑行轨道(9),所述电钻滑行轨道(9)的卡槽中设有定位电钻(8)。
6.优选的,所述车架行进系统(1)包括车架和导轮,所述电子显示器(4)外表面的两侧分别设有行进控制钮(14)和升降杆伸展钮(15)。
7.优选的,所述矩形底座外包件(13)内腔中设有球形可转动底座(20),所述球形可转动底座(20)与球体座(5)活动连接。
8.优选的,所述网架型升降杆(6)的中部活动连接有销柱(16),所述销柱(16)外表面的一端固定连接有活动座(11),所述活动座(11)与车架行进系统(1)之间固定连接有多级液压杆(12),所述网架型升降杆(6)最大伸长长度为15米,最大偏转角度为
±
45
°
。
9.优选的,所述安装臂手连接平台(10)与电钻滑行轨道(9)之间螺纹连接有定位螺
栓(19),所述电钻滑行轨道(9)左右长度为80cm。
10.优选的,所述定位电钻(8)的下端固定连接有电钻安装底座(7),所述电钻安装底座(7)的下端固定连接有行进轮(18)。
11.优选的,所述电钻安装底座(7)的下端固定连接有行进轮(18),所述行进轮(18)与电钻滑行轨道(9)的卡槽滑动连接。
12.与现有技术相比,本实用新型的有益效果是:
13.1、通过设置的车架行进系统(1)使装置可以正常的移动和工作,设置的导轮跨距满足轨道宽度要求,行进深度满足接触网间距的要求,同时与每施工段轨铺深度保持一致,直至全段轨道贯通,设置的栏杆(2)可以有效保证使用者的安全,防止使用者受伤,电子显示器(4)可以显示设备接收到的各种数据,方便使用者观察和读取,设置行进控制钮(14)可以控制行进轮(18)的转动,行进轮(18)在电钻滑行轨道(9)的卡槽内滚动,带动电钻安装底座(7)移动,从而使定位电钻(8)实现位移,此设置提高设备的自动化程度,以上设置从施工组织方面考虑,防止了重型机械如混凝土罐车,吊车等设备二次调运,避免了二次施工污染,给机电、给排水等工序提供了充足的施工时间,减少了与后续作业间的交叉,便于管道布设,同时也有助于提高工人工作效率,防止窝工,从施工效果方面考虑,机械操作自动化程度高,装配精准,安装点坐标误差维持在
±
30mm,减少了人为操作失误的可能性,提高了施工可靠度,从施工时间方面考虑,无需等待轨道铺设,接触网施工与其同步进行,具有良好的时间效应,与先轨通后电通的施工方式相比,可省出约一半工期的问题。
14.2、通过升降杆伸展钮(15)可以使多级液压杆(12)工作,多级液压杆(12)工作通过活动座(11)带动销柱(16),销柱(16)带动使网架型升降杆(6)实现纵向位移,网架型升降杆(6)自动伸展至目标接触网点位置,通过定位电钻(8)将有关部件依次安装的问题。
附图说明
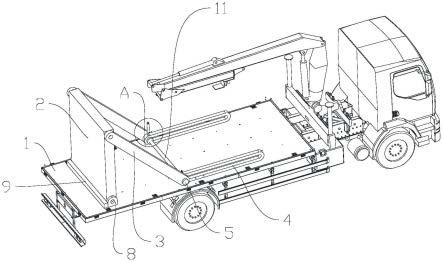
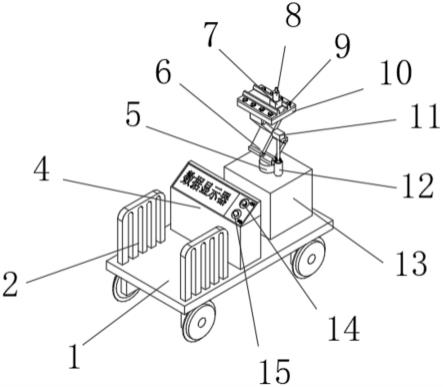
15.图1为本实用新型立体的结构示意图;
16.图2为本实用新型网架型升降杆的结构示意图;
17.图3为本实用新型销柱的结构示意图;
18.图4为本实用新型球形可转动底座的结构示意图;
19.图5为本实用新型行进轮的结构示意图。
20.图中:1、车架行进系统;2、栏杆;4、电子显示器;5、球体座;6、网架型升降杆;7、电钻安装底座;8、定位电钻;9、电钻滑行轨道;10、安装臂手连接平台;11、活动座;12、多级液压杆;13、矩形底座外包件;14、行进控制钮;15、升降杆伸展钮;16、销柱;18、行进轮;19、定位螺栓;20、球形可转动底座。
具体实施方式
21.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
22.请参阅图1-5,本实用新型提供一种技术方案:基于bim的刚性接触网无轨施工装
置,包括车架行进系统1,车架行进系统1的上端从左至右分别固定连接有栏杆2、电子显示器4和矩形底座外包件13,矩形底座外包件13的上端活动连接有球体座5,球体座5的上端固定连接有网架型升降杆6,网架型升降杆6的上端活动连接有安装臂手连接平台10,安装臂手连接平台10的上端固定连接有电钻滑行轨道9,电钻滑行轨道9的卡槽中设有定位电钻8。
23.本实施方案中,本设备使用java环境开发适用于windows系统的整合的可专门针对接触网定位点及车架行进系统1位置有关数据的电脑控制系统、数据处理系统以及电子显示器4,电脑控制系统基于bim大数据接受信息,传递信息,并控制行进装置;数据处理系统针对施工目标对大数据进行再加工并返回信息至控制系统;行进操作系统则负责精准施工,设置的车架行进系统1使装置可以正常的移动和工作,设置的导轮跨距满足轨道宽度要求,行进深度满足接触网间距的要求,同时与每施工段轨铺深度保持一致,直至全段轨道贯通,设置的栏杆2可以有效保证使用者的安全,防止使用者受伤,电子显示器4可以显示设备接收到的各种数据,方便使用者观察和读取,设置行进控制钮14可以控制行进轮18的转动,行进轮18在电钻滑行轨道9的卡槽内滚动,带动电钻安装底座7移动,从而使定位电钻8实现位移,此设置提高设备的自动化程度,以上设置从施工组织方面考虑,防止了重型机械如混凝土罐车,吊车等设备二次调运,避免了二次施工污染,给机电、给排水等工序提供了充足的施工时间,减少了与后续作业间的交叉,便于管道布设,同时也有助于提高工人工作效率,防止窝工,从施工效果方面考虑,机械操作自动化程度高,装配精准,安装点坐标误差维持在
±
30mm,减少了人为操作失误的可能性,提高了施工可靠度,从施工时间方面考虑,无需等待轨道铺设,接触网施工与其同步进行,具有良好的时间效应,与先轨通后电通的施工方式相比,可省出约一半工期,球体座5根据车、接触网定位点相对位置,尤以竖面角度位置,可于车架左右
±
45
°
旋转,矩形底座外包件13除起保护球体座5的作用外,更对球体座5旋转进行限位,通过升降杆伸展钮15可以使多级液压杆12工作,多级液压杆12工作通过活动座11带动销柱16,销柱16带动使网架型升降杆6实现纵向位移,网架型升降杆6自动伸展至目标接触网点位置,通过定位电钻8将有关部件依次安装。
24.具体的,车架行进系统1包括车架和导轮,电子显示器4外表面的两侧分别设有行进控制钮14和升降杆伸展钮15。
25.本实施例中,设置的车架行进系统1使装置可以正常的移动和工作,设置的导轮跨距满足轨道宽度要求,行进深度满足接触网间距的要求,同时与每施工段轨铺深度保持一致,直至全段轨道贯通,行进控制钮14和升降杆伸展钮15可以分别使行进轮18和多级液压杆12工作。
26.具体的,矩形底座外包件13内腔中设有球形可转动底座20,球形可转动底座20与球体座5活动连接。
27.本实施例中,球体座5根据车、接触网定位点相对位置,尤以竖面角度位置,可于车架左右
±
45
°
旋转,矩形底座外包件13除起保护球体座5的作用外,更对球体座5旋转进行限位。
28.具体的,网架型升降杆6的中部活动连接有销柱16,销柱16外表面的一端固定连接有活动座11,活动座11与车架行进系统1之间固定连接有多级液压杆12,网架型升降杆6最大伸长长度为15米,最大偏转角度为
±
45
°
。
29.本实施例中,通过升降杆伸展钮15可以使多级液压杆12工作,多级液压杆12工作
通过活动座11带动销柱16,销柱16带动使网架型升降杆6实现纵向位移,网架型升降杆6自动伸展至目标接触网点位置,通过定位电钻8将有关部件依次安装。
30.具体的,安装臂手连接平台10与电钻滑行轨道9之间螺纹连接有定位螺栓19,电钻滑行轨道9左右长度为80cm。
31.本实施例中,定位螺栓19可以将安装臂手连接平台10与电钻滑行轨道9进行固定,同时维修方便。
32.具体的,定位电钻8的下端固定连接有电钻安装底座7,电钻安装底座7的下端固定连接有行进轮18。
33.本实施例中,电钻安装底座7的设置可以方便定位电钻8方便更换同时可以提供良好的稳定。
34.具体的,电钻安装底座7的下端固定连接有行进轮18,行进轮18与电钻滑行轨道9的卡槽滑动连接。
35.本实施例中,设置行进控制钮14可以控制行进轮18的转动,行进轮18在电钻滑行轨道9的卡槽内滚动,带动电钻安装底座7移动,从而使定位电钻8实现位移,此设置提高设备的自动化程度。
36.尽管已经示出和描述了本实用新型的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本实用新型的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本实用新型的范围由所附权利要求及其等同物限定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。