技术特征:
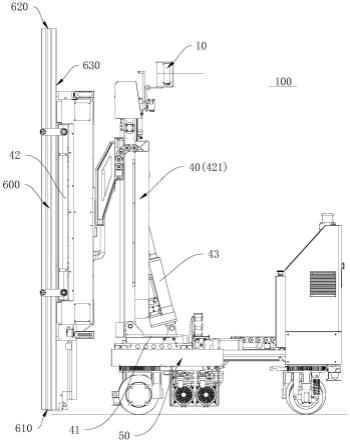
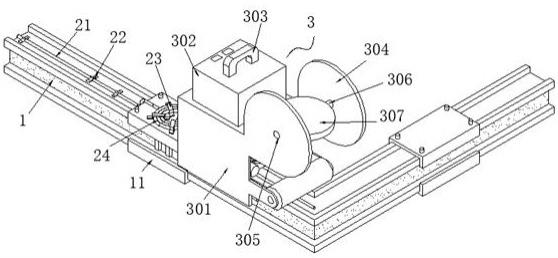
1.一种墙板安装机器人,其特征在于,包括:底盘;上装机构,安装于所述底盘,用于抓取、搬运和安装墙板;视觉检测机构,安装于所述上装机构,所述视觉检测机构能够获取所述上装机构所抓取的墙板的姿态参数,并发送至控制器;所述视觉检测机构包括原点,所述姿态参数包括所述原点距离地面的高度h、所述原点至所述上装机构所抓取的墙板的顶面的长度l2和所述原点至所述上装机构所抓取的墙板的长度l3;所述控制器用于根据所述姿态参数判断所述墙板的顶部距离地面的高度h’是否小于预设高度值h0;当所述上装机构所抓取的墙板处于搬运状态时,h0=h1,如果h’<h1,所述控制器判定墙板符合搬运条件,所述上装机构正常搬运墙板;当所述上装机构所抓取的墙板处于安装状态时,h0=h2,如果h’<h2,所述控制器判定墙板符合安装条件,所述上装机构正常安装墙板。2.根据权利要求1所述的墙板安装机器人,其特征在于,所述视觉检测机构包括:3d相机组件,所述3d相机组件设有所述原点;3d相机驱动机构,安装于所述上装机构,所述3d相机组件安装于所述3d相机驱动机构的执行端,所述3d相机驱动机构能够驱动所述3d相机组件移动。3.根据权利要求2所述的墙板安装机器人,其特征在于,所述3d相机驱动机构包括:滑动板,竖向滑动配合于所述上装机构;竖向驱动机构,安装于所述上装机构,能够驱动所述滑动板竖向移动;横向驱动机构,安装于所述滑动板,所述3d相机组件安装于所述横向驱动机构的执行端,所述横向驱动机构能够驱动所述3d相机组件横向移动。4.根据权利要求3所述的墙板安装机器人,其特征在于,所述横向驱动机构包括:平行连杆组件,包括多个平行设置的连杆,每个连杆的两端分别铰接于所述3d相机组件和所述滑动板;横向驱动件,安装于所述滑动板,所述横向驱动件能够驱动所述多个连杆同步移动,以通过所述平行连杆组件带动所述3d相机组件横向移动。5.根据权利要求3所述的墙板安装机器人,其特征在于,竖向驱动机构包括:竖向驱动件,安装于所述上装机构;拉板,所述拉板将所述竖向驱动件的执行端与所述滑动板相连,所述竖向驱动件通过所述拉板带动所述滑动板竖向移动。6.根据权利要求3所述的墙板安装机器人,其特征在于,所述3d相机驱动机构还包括:竖向到位检测机构,所述竖向到位检测机构用于检测所述滑动板到达上极限位置和下极限位置;横向到位检测机构,所述横向到位检测机构用于检测所述竖向驱动机构的执行端到达左极限位置和右极限位置。7.根据权利要求3所述的墙板安装机器人,其特征在于,在所述横向驱动机构的驱动下,所述3d相机组件具有左临界检测位置和右临界检测位置,当所述3d相机组件位于所述
左临界检测位置右临界检测位置时,所述原点均位于所述上装机构所抓取的墙板的轮廓之外。8.根据权利要求2所述的墙板安装机器人,其特征在于,所述3d相机组件包括:3d相机;相机支架,安装于所述3d相机驱动机构的执行端,所述3d相机安装于所述相机支架;相机护罩,安装于所述相机支架,并罩设住所述3d相机的背侧。9.根据权利要求1所述的墙板安装机器人,其特征在于,所述上装机构包括:底架,固定于所述底盘;夹爪机构,用于抓取墙板,所述视觉检测机构安装于所述夹爪机构的背侧;上装驱动机构,安装于所述底架,所述夹爪机构转动连接于所述底架,所述上装驱动机构能够驱动所述夹爪机构转动,以使所述夹爪机构抓取的墙板具有搬运状态和安装状态;当墙板位于安装状态时,墙板垂直于地面竖向设置;当墙板位于搬运状态时,墙板与地面之间倾斜设置。10.一种墙板安装机器人的视觉检测方法,其特征在于,所述墙板安装机器人的视觉检测方法使用了如权利要求1-9任一项所述的墙板安装机器人,所述墙板安装机器人的视觉检测方法包括:抓取墙板;检测所抓取的墙板的姿态参数;墙板位于搬运状态,根据所述姿态参数判断所抓取的墙板是否符合搬运条件,如果墙板符合搬运条件,上装机构正常搬运墙板;墙板位于安装状态,根据所述姿态参数判断所抓取的墙板是否符合安装条件,如果墙板符合安装条件,上装机构正常安装墙板。11.根据权利要求10所述的墙板安装机器人的视觉检测方法,其特征在于,“抓取墙板”的步骤包括:获取l2值,根据预设l1值,计算l=l1 l2,并分析l是否等于l0;当l=l0时,控制器判定正确抓取墙板。12.根据权利要求10所述的墙板安装机器人的视觉检测方法,当墙板位于搬运状态时,根据所获取的姿态参数计算出墙板的顶部至地面的高度h’,并分析h’是否小于h1,当h’<h1时,控制器判定墙板符合搬运条件。13.根据权利要求10所述的墙板安装机器人的视觉检测方法,其特征在于,当墙板处于搬运状态时,墙板的顶部至地面的高度h’的计算方法为:h2=wcosθ;h
′
=h h1 h2;其中,θ为墙板顶面与竖直面之间的夹角;w为墙板厚度。
14.根据权利要求10所述的墙板安装机器人的视觉检测方法,当墙板位于安装状态时,根据所获取的姿态参数计算出墙板的顶部至地面的高度h’,并分析h’是否小于h2,当h’<h2时,控制器判定墙板符合安装条件。15.根据权利要求14所述的墙板安装机器人的视觉检测方法,其特征在于,当墙板处于安装状态时,墙板的顶部至地面的高度h’的计算方法为:h
′
=h l2。
技术总结
本申请涉及一种墙板安装机器人以及视觉检测方法,属于建筑施工技术领域。本申请提出一种墙板安装机器人,包括:底盘;上装机构,安装于底盘;视觉检测机构,安装于上装机构,视觉检测机构能够获取墙板的姿态参数,并发送至控制器;视觉检测机构包括原点,姿态参数包括H、L2和L3。当墙板处于搬运状态时,如果H’<H1,控制器判定墙板符合搬运条件;当墙板处于安装状态时,如果H’<H2,控制器判定墙板符合安装条件。本申请还提出一种墙板安装机器人的视觉检测方法,使用该墙板安装机器人,能够避免墙板在搬运的过程中撞击横梁,以及避免在安装的过程中撞击天花板,从而使墙板安装机器人具有较好的作业安全性。好的作业安全性。好的作业安全性。
技术研发人员:周献华 黄健荣 穆雄
受保护的技术使用者:广东博智林机器人有限公司
技术研发日:2020.11.30
技术公布日:2022/6/4
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。