1.本发明涉及动作矫正领域,尤其涉及一种运动员跳高动作矫正方法。
背景技术:
2.现如今绝大多数运动员的训练都是通过教练或者专家进行指导与纠正,这很容易受教练或者专家的主观影响,同时对教练和专家的专业素质要求高。现如今,随着科学技术的发展,越来越多的科技产物运用在体育训练上。跳高是田径运动的田赛比赛项目之一,是人体通过助跑、起跳、腾空、落地等一系列动作形式跳越高度障碍的运动。对于这些动作,通常是由人的肉眼进行观察,判断动作是否标准,哪里需要进行矫正,一旦判断出错或者未及时进行纠正,让运动员没有掌握正确的动作技能,将极大地影响训练效果,直接关系到运动成绩的提高。
技术实现要素:
3.本发明的目的在于提供一种运动员跳高动作矫正方法,用以解决运动员的动作是否标准判断不够准确的问题,纠正运动员的错误动作,形成正确的动作技能,提高运动成绩。
4.为了实现上述目的,本发明采用如下技术方案:
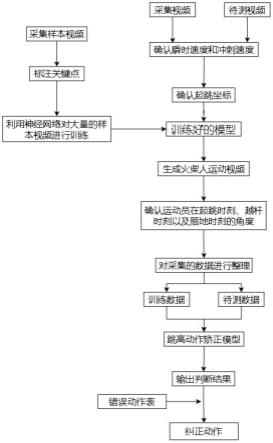
5.一种运动员跳高动作矫正方法,步骤如下:
6.步骤1、采集运动员跳高的视频;
7.步骤2、通过运动员跳高的视频,采集运动员的瞬时速度与冲刺速度;
8.步骤3、通过运动员跳高的视频,采集运动员起跳的坐标;
9.步骤4、通过运动员跳高的视频,生成对应的火柴人运动视频;
10.步骤5、根据运动员跳高的视频与火柴人运动视频,采集运动员在起跳时刻、越杆时刻以及落地时刻的角度;
11.步骤6、对采集的数据进行整理,利用神经网络训练得到跳高动作矫正模型;
12.步骤7、测试与纠正:待测视频经过步骤2-6后,得到的待测数据输入跳高动作矫正模型,输出判断结果,根据判断的结果,查找动作错误表,便可以得到错误动作的成因并加以纠正。
13.进一步的,所述步骤1中,采集运动员跳高的视频具体包括:拍摄视角为平拍,拍摄方向在运动员的右侧并与跳高架保持垂直,拍摄时,运动员始终保持在镜头的正中央。
14.进一步的,所述步骤2中,采集运动员的瞬时速度与冲刺速度具体包括:设运动员的的初始位置与跳高架的垂直距离为l,瞬时速度包含4个瞬时速度,分别是在l的瞬时速度,其通过计算慢放画面帧数,得到通过固定的距离时间,从而计算出瞬时速度;冲刺速度计算表示如下:
15.16.公式(1)中,s表示冲刺的距离为冲刺路线的长度,t表示冲刺的时间,v表示冲刺的速度。
17.进一步的,所述步骤3中,采集运动员起跳的坐标具体包括:将跳高架前面区域划分为2排,每排平均有8个方块区域,8个方块区域长度等于跳高架的两个立柱的距离,共计16个方块区域,每一个方块区域拥有一个唯一标识,用这个唯一标识表示运动员的起跳坐标。
18.进一步的,所述步骤4中,生成对应的火柴人运动视频具体包括:
19.步骤4.1、采集若干组运动员跳高样本视频;
20.步骤4.2、提取采集的样本视频中每帧图像,并对图像中的运动员的关键点进行标注并进行相应的连线或画圆;其中关键点包括:头顶、肩部、左手肘、左手腕、右手肘、右手腕、尾椎、左膝盖、左脚踝、右膝盖以及右脚踝这11个关键点;若关键点的个数不足11个,则视为缺失的关键点与其对称的关键点重合,其中左手肘与右手肘相对称,左手腕与右手腕相对称,左膝盖与右膝盖相对称,左脚踝与右脚踝相对称;
21.步骤4.3、利用神经网络对大量的样本视频进行训练,得到训练好的模型并进行保存于电子存储器或者云服务器中;
22.步骤4.4、将运动员跳高视频输入训练好的模型生成火柴人运动视频。
23.进一步的,所述步骤5中,具体包括:定义运动员跳高时脚掌离地之时为起跳时刻,定义运动员腾空后尾椎这个关键点达到最高点之时为越杆时刻,定义运动员越杆后任意身体部位接触海绵垫为落地时刻;其中角度包括:左脚踝-左膝盖-尾椎的角度、右脚踝-右膝盖-尾椎的角度、左膝盖-尾椎-肩部的角度、右膝盖-尾椎-肩部的角度、尾椎-肩部-左手肘的角度、尾椎-肩部-右手肘的角度、肩部-左手肘-左手腕的角度、肩部-右手肘-右手腕的角度这8个角度。
24.进一步的,所述步骤6中,采集的数据包括:4个瞬时速度、1个冲刺速度、1个起跳坐标、24个角度共计30个特征参数;神经网络采用bp神经网络,其中bp神经网络包含输入层、隐含层以及输出层输入层的神经元个数设为30,输出层为12个神经元,分别对应12个常见的跳高错误动作,采用以下公式计算隐含层的神经元个数:
[0025][0026]
公式(2)中,p表示输入层的个数,q表示输出层的个数,a为[1,10]的常数。
[0027]
进一步的,所述步骤6中,常见的跳高错误动作包括:起跳前减速甚至停顿;起跳时身体过早倒向横杆;起跳时摆动脚擦地;放脚不正确;倒体过早;功跑加速不匀,节奏素乱;助跑速度过快,致使跳不起来;坐着过杆,做不出送髋动作;身体与横杆斜交叉过杆;大腿后侧和小腿擦落横杆;头肩先着地;落地时双手先撑地。
[0028]
本发明的有益效果:
[0029]
1、通过采集运动员跳高的瞬时速度等参数,详细地描述了运动员跳高这个复杂的动作,便于后面对运动员动作是否错误的判断。
[0030]
2、通过将运动员跳高视频转化成火柴人运动视频,便于观察与测量各个角度,从而获取各个时刻的角度。
[0031]
3、通过bp神经网络训练得到的跳高动作矫正模型,较为准确地输出判断结果,利于运动员对错误动作进行纠正。
[0032]
4、本方法通过寻找错误动作的成因并加以纠正,对于促进运动员形成正确技能,提高运动成绩,培养合格人才具有重要意义。
附图说明
[0033]
图1为本发明提供的一种运动员跳高动作矫正方法的流程图;
[0034]
图2为本发明提供的跳高架前区域划分示意图;
[0035]
图3为本发明提供的火柴人关键点连接示意图。
具体实施方式
[0036]
为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。此外,下面所描述的本发明各个实施方式中所涉及到的技术特征只要彼此之间未构成冲突就可以相互组合。
[0037]
实施例1
[0038]
如图1所示,本实施例提供了一种运动员跳高动作矫正方法,包括如下步骤:
[0039]
步骤1、采集运动员跳高的视频;
[0040]
使用高速摄像机拍摄运动员跳高的视频,拍摄视角为平拍,拍摄方向在运动员的右侧并与跳高架保持垂直,拍摄时,运动员始终保持在镜头的正中央;
[0041]
步骤2、通过运动员跳高的视频,采集运动员的瞬时速度与冲刺速度;
[0042]
将运动员的的初始位置与跳高架的垂直距离设为l,瞬时速度包含4个瞬时速度,分别是在l的瞬时速度,分别记为v1、v2、v3、v4,其通过计算慢放画面帧数,得到通过固定的距离时间,从而计算出瞬时速度;
[0043]
设冲刺的时间段选为鸣枪后运动员起步直至运动员跳高时脚掌离地的这段时间段t,冲刺的距离为冲刺路线的长度s,因此冲刺速度表示如下:
[0044][0045]
步骤3、通过运动员跳高的视频,采集运动员起跳的坐标;
[0046]
如图2所示,将跳高架前面区域平均划分成16个区域,分别标记为1,2,
…
,16;若运动员的脚掌全部或者大部分落入某个区域,则视为运动员起跳的坐标为该区域的标号;
[0047]
步骤4、通过运动员跳高的视频,生成对应的火柴人运动视频;
[0048]
生成对应的火柴人运动视频包括以下步骤:
[0049]
步骤4.1、采集若干组运动员跳高样本视频;
[0050]
步骤4.2、提取采集的样本视频中每帧图像,并对图像中的运动员的关键点进行标注并进行相应的连线或画圆;
[0051]
其中关键点包括:头顶、肩部、左手肘、左手腕、右手肘、右手腕、尾椎、左膝盖、左脚踝、右膝盖以及右脚踝这11个关键点;
[0052]
若关键点的个数不足11个,则视为缺失的关键点与其对称的关键点重合,其中左手肘与右手肘相对称,左手腕与右手腕相对称,左膝盖与右膝盖相对称,左脚踝与右脚踝相对称;
[0053]
它们的连接方式与人体结构相同,如图3所示。
[0054]
步骤4.3、利用神经网络对大量的样本视频进行训练,得到训练好的模型并进行保存;
[0055]
本实施例中,采用的神经网络模型是cnn神经网络,将训练好的模型保存于电子存储器或者云服务器中;
[0056]
步骤4.4、将运动员跳高视频输入训练好的模型生成火柴人运动视频;
[0057]
步骤5、根据运动员跳高的视频与火柴人运动视频,采集运动员在起跳时刻、越杆时刻以及落地时刻的角度;
[0058]
起跳时刻为运动员跳高时脚掌离地之时;
[0059]
因为高速摄像机是在运动员的右边拍摄,运动员采用的是背式跳高,因此定义越杆时刻为运动员腾空后尾椎这个关键点达到最高点的时刻;
[0060]
落地时刻为运动员越杆后任意身体部位接触海绵垫的时刻;
[0061]
角度包括:左脚踝-左膝盖-尾椎的角度、右脚踝-右膝盖-尾椎的角度、左膝盖-尾椎-肩部的角度、右膝盖-尾椎-肩部的角度、尾椎-肩部-左手肘的角度、尾椎-肩部-右手肘的角度、肩部-左手肘-左手腕的角度、肩部-右手肘-右手腕的角度;
[0062]
分别对这些角度标记,具体如下表所示。
[0063]
[0064][0065]
表1
[0066]
因此得到的角度数目为:8*3=24个;
[0067]
步骤6、对采集的数据进行整理,利用神经网络训练得到跳高动作矫正模型;
[0068]
由之前的步骤可以得到的若干组数据,其中每一组数据都有:4个瞬时速度、1个冲刺速度、1个起跳点坐标、24个角度共计30个特征参数;
[0069]
本实施例中,采用bp神经网络对数据进行训练,具体如下:
[0070]
bp神经网络包含输入层、隐含层以及输出层,因为一组数据包括30个参数,因此,输入层的神经元个数设为30,输出层为12个神经元,分别对应12个常见的跳高错误动作,如下表所示。
[0071]
[0072]
[0073][0074]
表2错误动作表
[0075]
采用以下公式计算隐含层的神经元个数:
[0076][0077]
公式(2)中,p表示输入层的个数,q表示输出层的个数,a为[1,10]的常数;
[0078]
本实施例中,隐含层的神经元个数设为10;
[0079]
用matlab中的神经网络工具箱进行网络的训练,其中网络参数设定包括:
[0080]
1)最大训练次数epochs设为5000;
[0081]
2)训练目标精度goal设为le-7;
[0082]
3)学习率lr设为0.01;
[0083]
4)最大失败次数max_fail设为5;
[0084]
5)最小梯度要求min_grad设为le-6;
[0085]
6)显示训练迭代过程show为100;
[0086]
7)网络训练函数为自适应lr动量梯度下降法traingdx;
[0087]
8)隐含层和输出层的激励函数分别为tansig和logsig函数;
[0088]
设定完参数后,开始训练网络;
[0089]
将训练好的模型保存至云服务器或者电子存储器中,作为跳高动作矫正模型;
[0090]
步骤7、待测视频经过步骤2-6后,得到的待测数据输入跳高动作矫正模型,输出判断结果,根据判断的结果,查找动作错误表,便可以得到错误动作的成因并加以纠正。
[0091]
例如,若跳高动作矫正模型输出的是“000100100000”,则表示出现错误动作4和7,通过动作错误表可知是放脚不正确和助跑速度过快,致使跳不起来这两个错误动作,依照这两个错误动作的纠正方法进行训练,从而纠正错误动作。
[0092]
至此完成了整个方法的流程。
[0093]
结合具体实施,可以得到本发明的优点是,通过采集运动员跳高的瞬时速度等参数,详细地描述了运动员跳高这个复杂的动作,便于后面对运动员动作是否错误的判断;本方法通过寻找错误动作的成因并加以纠正,对于促进运动员形成正确技能,提高运动成绩,培养合格人才具有重要意义。
[0094]
本发明未详述之处,均为本领域技术人员的公知技术。
[0095]
以上所述的具体实施方式,对本发明的目的、技术方案和有益效果进行了进一步详细说明,所应理解的是,以上所述仅为本发明的具体实施方式而已,并不用于限定本发明的保护范围,凡在本发明的精神和原则之内,所做的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
