融合colregs场景知识的船舶行为意图识别与推理方法及装置
技术领域
1.本发明属于船舶行为意图识别技术领域,具体涉及一种融合colregs场景知识的船舶行为意图识别与推理方法及装置。
背景技术:
2.随着全球贸易的不断发展,水上交通流呈现繁忙化、复杂化特点,与此同时船舶制造逐渐走向大型化、高速化的趋势,这一系列因素给水上交通的监管人员以及驾引人员带来了巨大的监管和航行负担,其中一个值得注意的问题就是获取船舶的航行行为意图,一方面有利于水上交通监管人员及时了解水上交通状况以做出相应的管理措施,另一方面对船舶驾引人员来说可以掌握周围船舶的航行意图,为船舶的安全航行提供有意义的参考。
3.目前,船舶行为意图的识别和推理主要有基于统计学的方法,基于机器学习的方法和基于知识建模的方法。但是以上三种方法各自存在一定的缺陷,第一,基于统计学的方法大多使用高斯混合模型,核密度估计等统计学方法研究船舶的轨迹数据,这类方法需要收集海量的船舶航行数据,并且需要估计的参数较多,计算量较大;第二,基于机器学习的方法多采用聚类、分类、神经网络等方法对船舶航行数据展开研究,但是此类研究多针对性较强,往往适用于某一特定水域,并且基于统计学方法和基于机器学习的方法关注点侧重在数据层,往往忽略了船舶航行环境对船舶行为的影响,也就是船舶行为的语义层;第三,基于知识建模的方法多采用owl,prolog等语言对船舶行为形式化表达,能够从语义层反映出航行环境对船舶行为的影响,这类方法预先设定船舶行为知识库,但是这些先验知识库难以适应具有不确定性的水上交通环境,而难以准确识别船舶的行为意图,进而导致误报警率高的问题。最后以上三类方法均没有考虑到colregs对船舶行为意图的影响,船舶行为的语义层不仅包含航行的地理环境,还包含水上交通规则对其行为的约束,因此有必要将colregs的有关知识纳入船舶行为的意图识别中。
技术实现要素:
4.针对现有技术中存在的问题,本发明提供一种融合colregs场景知识的船舶行为意图识别与推理方法及装置,以从语义层解决船舶行为意图识别的不确定性问题。
5.为实现上述目的,本发明提供了一种融合colregs场景知识的船舶行为意图识别与推理方法,包括:
6.步骤s1:获取船舶航行数据;
7.步骤s2:基于colregs对船舶行为意图进行分类,得到船舶行为意图集;
8.步骤s3:根据船舶行为意图建立融合colregs的船舶行为一阶逻辑谓词知识库;
9.步骤s4:基于建立的船舶行为一阶逻辑谓词知识库建立船舶行为规则知识库;
10.步骤s5:根据建立的规则知识库构建马尔科夫逻辑网络;
11.步骤s6:根据输入的航行数据和建立的马尔科夫逻辑网识别和推理船舶的行为。
12.进一步地,船舶航行数据包括自动识别系统(ais)发送的船舶航行动静态数据以及先验的船舶航行地理环境数据。
13.船舶航行静态数据包含海上移动标识码(mmsi)。
14.船舶航行动态数据包括位置(position)、时间(time)、对地航向(cog)、对地航速(sog)。
15.船舶航行地理环境数据包括港口内的通航设施的范围,名称信息,通航设施包括锚地、航道、泊位。
16.进一步地,船舶行为意图集是指根据colregs的条款规定,人工获取条款约束下的不同船舶行为意图,建立船舶行为意图集。根据colregs中第十条(分道通航制)有关船舶在通航分道航行的规定提取船舶行为意图,包括汇入意图,横越航道意图。
17.进一步地,根据船舶行为意图建立融合colregs的船舶行为一阶逻辑谓词知识库主要包括基于专家知识建立相应的谓词并形成一阶逻辑谓词知识库,其中,谓词表示对船舶行为简单证据的描述及其之间关联关系的描述。
18.简单证据是指与船舶行为有关的观测知识,包括船舶本身的运动特征知识和属性知识,这类知识是组成船舶行为的基元知识,不可再分。
19.基于已经建立的一阶逻辑谓词,利用逻辑关系语言以及量词组合不同的谓词,进而得到相应的船舶行为规则知识库。规则由谓词之间的逻辑关系建立,规则知识库由各种船舶行为规则组成。
20.进一步地,根据船舶行为规则知识库建立马尔科夫逻辑网是指利用专家知识对知识库中的每一条规则赋予权值信息,进而得到马尔科夫逻辑网。建立马尔科夫逻辑网表示赋予船舶行为规则知识库中的每一条规则权值信息,形式化表达为l=(fi,wi),其中fi表示规则,wi表示每条规则对应的权重。
21.进一步地,将船舶感知到的航行数据作为输入,判断各谓词的真假情况,进而得到各规则的真假情况,最终结合各规则的权重信息形成马尔科夫逻辑网,推理出最似然的船舶行为意图。船舶行为意图识别和推理表示根据马尔科夫逻辑网的联合分布得到最似然的船舶行为意图,联合分布为:其中z为归一化因子,ni(x)为规则为真的数量,x表示可能的行为意图。
22.本发明还提供了一种融合colregs场景知识的船舶行为意图识别与推理装置,包括电源,电路板,数据接口,用户接口,数据处理模块、规则生成模块、网络生成模块和行为推理模块;
23.数据处理模块对输入的船舶自动识别系统的数据进行预处理,规则生成模块首先将colregs中对船舶行为的描述转化为一阶谓词,然后基于一阶谓词建立行为规则知识库,网络生成模块将行为规则知识库中的规则知识转化为马尔可夫逻辑网络,行为推理模块将识别得到的船舶航行数据与马尔科夫逻辑网络融合推理船舶行为意图;
24.源为装置供电,电路板安装数据处理模块、规则生成模块、网络生成模块和行为推理模块,数据接口引入外源ais数据和港口地理数据,用户接口输出船舶行为意图推理结果。
25.本发明与现有技术相比,具有以下优点及有益效果:
26.本发明能够从语义层解决船舶行为意图识别的不确定性问题。
27.本发明能够克服现有船舶行为意图识别和推理中缺失上下文背景知识的问题,融合colregs场景知识能够从人脑认知的层次赋予船舶航行数据以物理意义,实现船舶行为意图的语义化识别和推理,准确识别船舶的行为意图。
附图说明
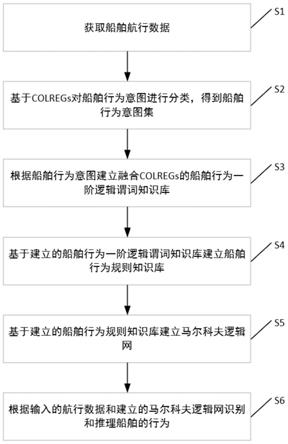
28.图1为本发明的融合colregs场景知识的船舶行为意图识别及推理方法流程图。
29.图2为本发明提供的船舶航行意图分类示意图。
30.图3为本发明提供的船舶与航行区域之间的拓扑关系示意图。
31.图4为本发明提供的融合colregs场景知识的船舶行为意图识别装置。
具体实施方式
32.为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。此外,下面所描述的本发明各个实施方式中所涉及到的技术特征只要彼此之间未构成冲突就可以相互组合。
33.本发明实施例提供一种融合colregs场景知识的船舶行为意图识别和推理方法与装置,图1为本发明提供的融合colregs场景知识的船舶行为意图识别和推理方法的流程示意图,如图1所示,包括如下步骤:
34.步骤s1:获取船舶航行数据;
35.步骤s2:基于colregs对船舶行为意图进行分类,得到船舶行为意图集;
36.步骤s3:根据船舶行为意图建立融合colregs的船舶行为一阶逻辑谓词知识库;
37.步骤s4:基于建立的船舶行为一阶逻辑谓词知识库建立船舶行为规则知识库;
38.步骤s5:根据建立的规则知识库构建马尔科夫逻辑网络;
39.步骤s6:根据输入的航行数据和建立的马尔科夫逻辑网识别和推理船舶的行为。
40.其中,步骤s1中船舶航行数据包括自动识别系统(ais)所记录的船舶动静态数据以及先验的船舶航行地理环境数据。
41.具体地,船舶航行静态数据包括海上移动标识码(mmsi),用以唯一标识和代表船舶。
42.船舶航行动态数据有位置数据(position),包含经度(longitude)、纬度(latitude),时间数据(time),对地航向数据(cog)和对地航速数据(sog)。
43.船舶航行地理环境数据包括港口内的通航设施的范围,名称信息,通航设施包括锚地、航道、泊位,一般利用区域的各个顶点划定所包含的范围,使用港口官方的名称进行语义标注,例如主航道,一号锚地。
44.具体地,步骤s2基于colregs对船舶行为意图进行分类主要根据colregs中第十条(分道通航制)第二款第三项以及第十条(分道通航制)第三款中对船舶行为的约束获取船舶行为意图。图2为本发明提供的船舶行为意图分类示意图。
45.colregs中第十条(分道通航制)第二款第三项规定使用分道通航制的船舶通常在通航分道的端部驶进或驶出,但从分道的任何一侧驶进或驶出时,应与分道的交通总流向
形成尽可能小的角度,由此得出船舶在使用通航分道时的行为意图包含汇入航道(merge)。
46.colregs中第十条(分道通航制)第三款规定船舶应尽可能避免穿越通航分道,但如不得不穿越时,应尽可能以与分道的交通流总流向成直角的船首向穿越。由此得出船舶在有通航分道的水域中的行为意图包含直角横越航道(right_angle_cross)。
47.其中,步骤s3根据船舶行为意图建立融合colregs的船舶行为一阶逻辑谓词知识库主要包括基于专家知识建立相应的谓词并形成一阶逻辑谓词知识库,其中,谓词表示船舶行为简单证据的描述及其之间的关联关系。简单证据是指不可再分的知识,包括船舶属性知识,包含动态属性和静态属性以及时间知识。
48.动态属性知识(o)包括船舶运动属性(m)、拓扑属性(topo)、距离属性(dis)和角度属性(dierction)
49.船舶运动属性知识包括移动(move)和停留(stop),其中移动包含变向和变速。变向包含左转(turnport)、右转(turnstarboard)、直行(gostraight),例如turnport(x)表示船舶x在左转向。变速包含加速(speedup)、减速(speeddown)、匀速(keepspeed),例如speedup(x)表示船舶x在加速。
50.图3表示船舶与航行区域之间的拓扑关系示意图。船舶拓扑属性表示船舶与周围航行地理环境的交互知识,根据船舶航行的区域以及与典型区域之间的关系,将船舶视为一个点,主要分为点在线上(pointinline),点在区域外(pointoutarea)和点在区域内(pointinarea),例如pointinarea(x,fairway)表示船舶在航道内。
51.距离属性表示对象之间的距离关系,包含dis,farthan和equal,例如dis(m,n,q)表示点m到q的距离和点n到q的距离之差,farthan(dis(m,n,q),threshold)表示点m和点n到对象q的距离大于一个阈值(threshold)时,m点到对象q的距离大于n点到对象q的距离,equal(dis(m,n,q),threshold)表示点n到q的距离和点n到q的距离的差值如果在一个阈值(threshold)内,则两点到对象q的距离相等。
52.角度属性表示船舶在两轨迹点连线形成的轨迹与正北之间的夹角,例如direction(x,m,n)表示船舶x在m,n两点之间的轨迹与正北方向之间的夹角,使用greatthan表示两个角度之间的大小关系。
53.静态属性知识是对船舶本身的描述,包括船舶种类,例如motorvessel(x)表示船舶x为机动船。
54.时间知识是对时间的关系之间的描述,主要基于allen的时间代数理论,包含before、after、equals、meets、met by、overlaps、overlapped by、contains、during、starts、startedby、finishes、finished by十三种。
55.此外,还使用attime表示船舶航行过程中的时间点知识。
56.以上的每一个谓词都会提供布尔类型的值,如果谓词成立则返回true,否则返回false。
57.其中,步骤s4基于建立的船舶行为一阶逻辑谓词知识库建立船舶行为规则知识库主要指利用逻辑关系语言以及量词组合不同的谓词,以得到规则,最终形成规则知识库。
58.规则可视为马尔科夫逻辑网中的团,如果该规则成立则返回真值true,否则返回假值false。
59.具体地,逻辑关系语言包括“∧”、“∨”、
[0060]“∧”表示合取,当且仅当两边都为真的时候才成立。
[0061]“∨”表示析取,只要两边有一个为真就成立。
[0062]
表示蕴含,该式左边为真时,右边也为真,反之也成立。
[0063]
表示等价,当且仅当两边取值相同时才成立。
[0064]
具体地,量词包括否定量词存在量词全称量词
[0065]
否定量词表示否定,例如f表示f的取值为false。
[0066]
存在量词表示只要有满足条件的一个取值即可成立,例如表示存在一个值x使得f的取值为true。
[0067]
全称量词表示任意取值都要满足条件,例如表示任意x都使得f的取值为true。
[0068]
结合上述的谓词,量词和逻辑关系语言可以定义规则
[0069]
例如左转向可以表示为:
[0070][0071]
该规则可表示轨迹段p1p2的角度大于轨迹段p2p3的角度时等价于船舶x在左转向。
[0072]
机动船穿越航道边界可表示为:
[0073][0074]
该规则表示如果一艘机动船时间点t1时在航道外,之后时间点t2时在航道内,则表明该船自航道外穿过了航道的左边界(fairway_p)或右边界(fairway_s)。
[0075]
机动船接近航道总流向的右侧边界:
[0076][0077]
该规则表示如果一艘机动船时间点t1时在航道外,之后时间点t2时在航道外,并且在t2时到航道右边界的距离小于t1时到航道右边界的距离,表明船舶此时在靠近航道右边界。
[0078]
机动船沿航道总流向形式可以表示为:
[0079][0080]
船舶汇入交通流可以表示为:
[0081][0082]
该规则表示船舶在接近航道右侧后继续穿越航道右侧的边界接壤沿着航道交通总流向行驶,表明该船舶是汇入行为意图。
[0083]
类似操作可以得到相应的规则知识库。
[0084]
其中步骤s5基于建立的知识库构建马尔科夫逻辑网是指对知识库中的各条规则赋予相应的权重,以符合具有不确定性的现实情况。
[0085]
目前,关于马尔可夫逻辑网的规则权重学习仍是一个研究方向,因此本发明为简化采用基于专家经验的方式为每一条规则针对不同的行为意图给出相应的权重信息以构建马尔科夫逻辑网。
[0086]
赋予船舶行为规则知识库中的每一条规则权值信息,形式化表达为l=(fi,wi),其中fi表示规则i,wi表示每条规则对应的权重。
[0087]
其中步骤s6所述基于马尔科夫逻辑网识别和推理船舶行为意图是指将收集到的船舶航行数据以及航行的地理环境数据映射到一阶逻辑谓词知识库中,进而基于一阶逻辑谓词知识库得到相应的规则真假状况,根据公式来确定最有可能的行为意图,其中,x表示可能的行为意图,z为归一化系数,表示所有规则的数量总和,将对应为真的规则和相应的权重带入联合分布公式推理得到最有可能的船舶行为意图,进而实现船舶行为意图的识别和推理。
[0088]
本发明还公开了一种融合colregs场景知识的船舶行为意图识别与推理装置,如图4所示,包括电源,电路板,数据接口,用户接口,数据处理模块、规则生成模块、网络生成模块和行为推理模块;
[0089]
数据处理模块对输入的船舶自动识别系统的数据进行预处理,规则生成模块首先将colregs中对船舶行为的描述转化为一阶谓词,然后基于一阶谓词建立行为规则知识库,网络生成模块将行为规则知识库中的规则知识转化为马尔可夫逻辑网络,行为推理模块将识别得到的船舶航行数据与马尔科夫逻辑网络融合推理船舶行为意图;
[0090]
电源为装置供电,电路板安装数据处理模块、规则生成模块、网络生成模块和行为推理模块,数据接口引入外源ais数据和港口地理数据,用户接口输出船舶行为意图推理结果。
[0091]
本领域的技术人员容易理解,以上仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
