1.本发明涉及无人机技术领域,具体为一种无人机导航用的位置及速度的实时估计方法和系统。
背景技术:
2.无人机全称为无人驾驶飞机,是利用无线电遥控设备和自备的程序控制装置操纵的不载人飞机。
3.多旋翼无人机属于新兴技术、高新前沿科技产业。随着科技的发展,无人机除用于军事用途外,在民用领域的应用范围也越来越广阔。由于无人机具有运行成本低、无伤亡风险、机动性能好、可进行超视距飞行、使用方便高效等特点,目前已被成功应用于影视航拍、测绘航测、高压线巡查、远程监控、救灾救援、农药喷洒、商业表演等领域,越来越多的行业正希望用无人机取代传统的人工作业方式。
4.无人机上的飞行控制系统,用以控制无人机的飞行,是无人机技术的核心,控制系统的优劣直接影响无人机的性能甚至安全性,而对无人机的姿态、位置、速度、高度等信息的准确获取和控制则是一个优秀的无人机控制系统的基础。如何提高无人机的姿态、位置、速度、高度的控制速度、控制精度是当前需要解决的问题不管是多旋翼无人机还是固定翼无人机的控制系统都需要提供高精度而且实时的位置、速度及姿态估计,高精度测量是高精度控制的前提,实时性则是对应了控制周期的需要。但是现有的无人机导航用位置和速度预估设备容易受到干涉影响,现有技术汇总解决方案较为复杂,需要使用设备精度,容易受影响,小型无人机需要严格控制制造成本和维护成本,因此我们提出一种无人机导航用的位置及速度的实时估计方法。
技术实现要素:
5.本发明提供了如下技术方案:
6.一种无人机导航用的位置及速度的实时估计方法,包括:
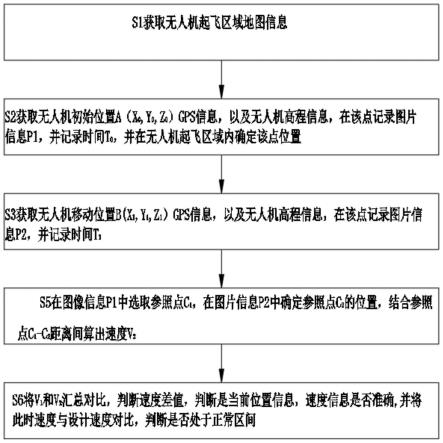
7.s1获取无人机起飞区域地图信息;
8.s2获取无人机初始位置a(x0,y0,z0)gps信息,以及无人机高程信息,在该点记录图片信息p1,并记录时间t0,并在无人机起飞区域内确定该点位置;
9.s3获取无人机移动位置b(x1,y1,z1)gps信息,以及无人机高程信息,在该点记录图片信息p2,并记录时间t1;
10.s4结合高程信息和gps信息计算,b点-a点的距离,计算t
1-t0的时间差值,并结合b点到a点的距离算出当前速度v1;
11.s5在图像信息p1中选取参照点c1,在图片信息p2中确定参照点c2的位置,结合参照点c
1-c2距离间算出速度v2;
12.s6将v1和v2汇总对比,判断速度差值,判断是当前位置信息,速度信息是否准确,并将此时速度与设计速度对比,判断是否处于正常区间。
13.作为本发明的一种优选方案,所述步骤s1中地图信息进一步区分为:
14.s1.1通过gps模块获取全球gps信息;
15.s1.2确定无人机gps位置,并以该位置半径1-5km划定起飞区域,并在无人机控制设备上显示。
16.作为本发明的一种优选方案,步骤s2中的获取无人机初始位置信息进一步包括如下步骤;
17.s2.1获取无人机初始位置a(x0,y0,z0)gps信息;
18.s2.2通过雷达模块获取无人机当前高程信息;
19.s2.3记录时间t0,并在无人机起飞区域内确定该点位置。
20.作为本发明的一种优选方案,步骤s3中的采集水源信息进一步包括如下步骤:
21.s3.1取无人机移动位置b(x1,y1,z1)gps信息;
22.s3.2通过雷达模块获取无人机高程信息,在该点记录图片信息p2;
23.s3.2记录时间t1并在无人机起飞区域内确定该点位置。
24.作为本发明的一种优选方案,步骤s4的获取报警信息进一步包括如下步骤:
25.s4.1结合高程信息和gps信息计算,b点-a点的距离;
26.s4.2计算t
1-t0的时间差值,并结合b点到a点的距离算出当前速度v1。
27.作为本发明的一种优选方案,步骤s5的报告报警信息一般包括如下步骤:
28.s5.1在图像信息p1中选取参照点c1,并结合雷达信息确定c1点位置;
29.s5.2在图片信息p2中再次确定参照点c1的位置,结合参照点c1距离间算出速度v2。
30.作为本发明的一种优选方案,步骤s6的报告报警信息一般包括如下步骤:
31.s6.1将v1和v2汇总对比,判断速度差值,若速度差值在允许阈值内则采用数据,作为当前位置以及速度信息;
32.s6.2将上述确定的速度信息与设计速度对比,判断速度差值,若速度差值在允许阈值内则采用该信息上传,速度超出阈值则舍弃数据,接着将多组数据整合平均得估算速度。
33.一种无人机导航用的位置及速度的实时估计系统,包括:
34.gps模块,所述gps模块设置与无人机上且与总控模块连接,所述gps用于采集无人机实时位置信息并将信息发送给总控模块;
35.雷达模块,所述雷达模块连接至总控模块,所述雷达模块用于采集无人机距离地面信息;
36.拍照模块,所述拍照模块连接至总控模块,用于采集视频信息;
37.总控模块,所述总控模块分别于gps模块、雷达模块和拍照模块连接,用于接收gps模块、雷达模块和拍照模块采集的数据信息并进行整合计算。
38.作为本发明的一种优选方案,所述总控模块包括:
39.数据处理模块,所述数据处理模块连接至gps模块、雷达模块和拍照模块,所述数据处理模块用于接收数据处理模块采集的数据信息并进行整合计算;
40.计时模块,所述计时模块连接至所述数据处理模块,所述计时模块用于记录gps模块、雷达模块和拍照模块采集信息的时间节点。
41.作为本发明的一种优选方案,所述总控模块还包括:
42.通讯模块,所述通讯模块与数据处理模块连接,所述通讯模块用于与工作人员随身携带的智能终端连接。
43.与现有技术相比:通过使用gps模块和雷达模块测距,二者结合利用gps技术测算距离,从而测出速度,以及通过雷达模块选择参照点在飞行后测算距离和速度,加工两个速度结合设计速度相对比,可有效判断当前速度是否为正常速度,进而可排出不准确的数据使得预估数据更加准确。
附图说明
44.为了更清楚地说明本发明实施方式的技术方案,下面将结合附图和详细实施方式对本发明进行详细说明,显而易见地,下面描述中的附图仅仅是本发明的一些实施方式,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。其中:
45.图1为本发明一种无人机导航用的位置及速度的实时估计方法框图;
46.图2为本发明一种无人机导航用的位置及速度的实时估计系统框图;
47.图3为本发明一种无人机导航用的位置及速度的实时估计系统的总控模块框图;
48.图4为本发明一种无人机导航用的位置及速度的实时估计系统的v1和v2速度对比框图;
49.图5为本发明一种无人机导航用的位置及速度的实时估计系统的测算速度中与出厂设置速度对比原理框图一;
50.图6为本发明一种无人机导航用的位置及速度的实时估计系统的测算速度与出厂设置速度对比原理框图二。
51.图中:100、gps模块,200、雷达模块,300、拍照模块,400、总控模块。
具体实施方式
52.为使本发明的上述目的、特征和优点能够更加明显易懂,下面对本发明的具体实施方式做详细的说明。
53.在下面的描述中阐述了很多具体细节以便于充分理解本发明,但是本发明还可以采用其他不同于在此描述的其他方式来实施,本领域技术人员可以在不违背本发明内涵的情况下做类似推广,因此本发明不受下面公开的具体实施方式的限制。
54.为使本发明的目的、技术方案和优点更加清楚,下面将对本发明的实施方式进一步的详细描述。
55.图1-图6示出的是本发明一种无人机导航用的位置及速度的实时估计方法和系统通过使用gps模块100和雷达模块200测距,二者结合利用gps技术测算距离,从而测出速度,以及通过雷达模块200选择参照点在飞行后测算距离和速度,加工两个速度结合设计速度相对比,可有效判断当前速度是否为正常速度,进而可排出不准确的数据使得预估数据更加准确,具体的,其包括:
56.一种无人机导航用的位置及速度的实时估计方法,包括:
57.s1获取无人机起飞区域地图信息;
58.s2获取无人机初始位置a(x0,y0,z0)gps信息,以及无人机高程信息,在该点记录图
片信息p1,并记录时间t0,并在无人机起飞区域内确定该点位置;
59.s3获取无人机移动位置b(x1,y1,z1)gps信息,以及无人机高程信息,在该点记录图片信息p2,并记录时间t1;
60.s4结合高程信息和gps信息计算,b点-a点的距离,计算t
1-t0的时间差值,并结合b点到a点的距离算出当前速度v1;
61.s5在图像信息p1中选取参照点c1,在图片信息p2中确定参照点c2的位置,结合参照点c
1-c2距离间算出速度v2;
62.s6将v1和v2汇总对比,判断速度差值,判断是当前位置信息,速度信息是否准确,并将此时速度与设计速度对比,判断是否处于正常区间。
63.进一步的,所述步骤s1中地图信息进一步区分为:
64.s1.1通过gps模块100获取全球gps信息;
65.s1.2确定无人机gps位置,并以该位置半径1-5km划定起飞区域,并在无人机控制设备上显示。
66.进一步的,步骤s2中的获取无人机初始位置信息进一步包括如下步骤;
67.s2.1获取无人机初始位置a(x0,y0,z0)gps信息;
68.s2.2通过雷达模块200获取无人机当前高程信息;
69.s2.3记录时间t0,并在无人机起飞区域内确定该点位置。
70.进一步的,步骤s3中的采集水源信息进一步包括如下步骤:
71.s3.1取无人机移动位置b(x1,y1,z1)gps信息;
72.s3.2通过雷达模块200获取无人机高程信息,在该点记录图片信息p2;
73.s3.2记录时间t1并在无人机起飞区域内确定该点位置。
74.进一步的,步骤s4的获取报警信息进一步包括如下步骤:
75.s4.1结合高程信息和gps信息计算,b点-a点的距离;
76.s4.2计算t
1-t0的时间差值,并结合b点到a点的距离算出当前速度v1。
77.进一步的,步骤s5的报告报警信息一般包括如下步骤:
78.s5.1在图像信息p1中选取参照点c1,并结合雷达信息确定c1点位置;
79.s5.2在图片信息p2中再次确定参照点c1的位置,结合参照点c1距离间算出速度v2。
80.进一步的,步骤s6的报告报警信息一般包括如下步骤:
81.s6.1将v1和v2汇总对比,判断速度差值,若速度差值在允许阈值内则采用数据,作为当前位置以及速度信息,其中所述速度差值的阈值受当前天气状态影响,一般风力等级越高,阈值参数越大;
82.s6.2将上述确定的速度信息与设计速度对比,判断速度差值,若速度差值在允许阈值内则采用该信息上传,速度超出阈值则舍弃数据,接着将多组数据整合平均得估算速度。
83.一种无人机导航用的位置及速度的实时估计系统,包括:
84.gps模块100,所述gps模块100设置与无人机上且与总控模块400连接,所述gps用于采集无人机实时位置信息并将信息发送给总控模块400;
85.雷达模块200,所述雷达模块200连接至总控模块400,所述雷达模块200用于采集无人机距离地面信息;
86.拍照模块300,所述拍照模块300连接至总控模块400,用于采集视频信息;
87.总控模块400,所述总控模块400分别于gps模块100、雷达模块200和拍照模块300连接,用于接收gps模块100、雷达模块200和拍照模块300采集的数据信息并进行整合计算。
88.进一步的,所述总控模块400包括:
89.数据处理模块,所述数据处理模块连接至gps模块100、雷达模块200和拍照模块300,所述数据处理模块用于接收数据处理模块采集的数据信息并进行整合计算;
90.计时模块,所述计时模块连接至所述数据处理模块,所述计时模块用于记录gps模块100、雷达模块200和拍照模块300采集信息的时间节点。
91.进一步的,所述总控模块400还包括:
92.通讯模块,所述通讯模块与数据处理模块连接,所述通讯模块用于与工作人员随身携带的智能终端连接。
93.实施例1:一种无人机导航用的位置及速度的实时估计方法如下:一种无人机导航用的位置及速度的实时估计方法,包括:
94.s1获取无人机起飞区域地图信息,具体步骤为:
95.s1.1通过gps模块100获取全球gps信息;
96.s1.2确定无人机gps位置,并以该位置半径1-5km划定起飞区域,并在无人机控制设备上显示;
97.s2获取无人机初始位置a(x0,y0,z0)gps信息,以及无人机高程信息,在该点记录图片信息p1,并记录时间t0,并在无人机起飞区域内确定该点位置,具体步骤为,
98.s2.1获取无人机初始位置a(x0,y0,z0)gps信息;
99.s2.2通过雷达模块200获取无人机当前高程信息;
100.s2.3记录时间t0,并在无人机起飞区域内确定该点位置;
101.s3获取无人机移动位置b(x1,y1,z1)gps信息,以及无人机高程信息,在该点记录图片信息p2,并记录时间t1,具体步骤为:
102.s3.1取无人机移动位置b(x1,y1,z1)gps信息;
103.s3.2通过雷达模块200获取无人机高程信息,在该点记录图片信息p2;
104.s3.2记录时间t1并在无人机起飞区域内确定该点位置;
105.s4结合高程信息和gps信息计算,b点-a点的距离,计算t
1-t0的时间差值,并结合b点到a点的距离算出当前速度v1,具体步骤为:
106.s4.1结合高程信息和gps信息计算,b点-a点的距离;
107.s4.2计算t
1-t0的时间差值,并结合b点到a点的距离算出当前速度v1;
108.s5在图像信息p1中选取参照点c1,在图片信息p2中确定参照点c2的位置,结合参照点c
1-c2距离间算出速度v2,具体步骤为:
109.s5.1在图像信息p1中选取参照点c1,并结合雷达信息确定c1点位置;
110.s5.2在图片信息p2中再次确定参照点c1的位置,结合参照点c1距离间算出速度v2;
111.s6将v1和v2汇总对比,判断速度差值,判断是当前位置信息,速度信息是否准确,并将此时速度与设计速度对比,判断是否处于正常区间,具体步骤为:
112.s6.1将v1和v2汇总对比,判断速度差值,若速度差值在允许阈值内则采用数据,作为当前位置以及速度信息;
113.s6.2将上述确定的速度信息与设计速度对比,判断速度差值,若速度差值在允许阈值内则采用该信息上传,速度超出阈值则舍弃数据,接着将多组数据整合平均得估算速度。
114.实施例2,一种无人机导航用的位置及速度的实时估计系统,包括:
115.gps模块100,所述gps模块100设置与无人机上且与总控模块400连接,所述gps用于采集无人机实时位置信息并将信息发送给总控模块400;
116.雷达模块200,所述雷达模块200连接至总控模块400,所述雷达模块200用于采集无人机距离地面信息;
117.拍照模块300,所述拍照模块300连接至总控模块400,用于采集视频信息;
118.总控模块400,所述总控模块400分别于gps模块100、雷达模块200和拍照模块300连接,用于接收gps模块100、雷达模块200和拍照模块300采集的数据信息并进行整合计算;具体的,所述总控模块400包括:数据处理模块,所述数据处理模块连接至gps模块100、雷达模块200和拍照模块300,所述数据处理模块用于接收数据处理模块采集的数据信息并进行整合计算;计时模块,所述计时模块连接至所述数据处理模块,所述计时模块用于记录gps模块100、雷达模块200和拍照模块300采集信息的时间节点;通讯模块,所述通讯模块与数据处理模块连接,所述通讯模块用于与工作人员随身携带的智能终端连接,所述智能终端可为智能手机,电脑等设备;
119.使用时通过gps模块100采集无人机的gps数据,通过雷达模块200采集参照点距离信息以及与地面垂直信息,通过拍照模块300采集图像信息,同时通过实践模块采集时间信息,并将采集信息发送给总控模块400,进行数据处理计算得出速度信息,且所述总控模块400内置有无人机设计飞行速度区间,用于作为参照,通过整合上述数据可预估小型无人机的航向速度,同时当前图像信息,可在出现意外事故时候进行寻回作业,可用来找回残机中的数据减少损失。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。