1.本发明涉及飞机飞控系统领域,具体涉及一种用于在飞行员操纵时为飞行员提供人工感觉力的力感设备。
背景技术:
2.某些型号飞机的升降舵、副翼以及方向舵舵面控制是通过集成化的模块将驾驶舱的机械信号转化为电信号,由飞控计算机将模块输出的电信化进行整形,最终输出控制信号到舵面实现舵面的位置控制。在此过程中,飞行员需要通过升降舵模块、副翼模块和方向舵模块来实现飞机的姿态控制,而此类模块化的设备的主要作用是输出驾驶舱的机械信号以及实现操纵器件的力感和定中并提供了配平输入和ap伺服输入机械接口。其中驾驶舱操纵器件的机械信号输出一般是由传感器实现,而操纵器件的力感和定中一般是由力感单元提供,配平输入和ap伺服电机输入一般通过齿轮配合实现。
3.目前国内外对此类模块化设备的研究多数集中于力感单元的核心元件机械弹簧,此类机械弹簧的截面为矩形,相较于传统的扭矩弹簧和拉压弹簧,机械弹簧的制造工序更为复杂,次品率更高,需要严格控制工艺,因此机械弹簧的加工成本较高,不宜批量生产,由此导致机械弹簧的生产成本较高,经济性较差。此外,虽然机械弹簧可以提供扭转力矩的输出,但是相比于传统的扭矩弹簧和拉压弹簧,机械弹簧的耐久性较差。
4.因此,目前考虑一种能够实现优化三轴力感机构以取代机械弹簧,提高设备的经济性的力感单元。
技术实现要素:
5.为了克服现有力感单元的耐久性较差的问题,本发明提供了一种力感设备,用于在飞行员操纵时为飞行员提供人工感觉力,该力感设备采用了市场上常见的拉压弹簧来实现飞行员感觉力的产生,此方法次品率低,设计出来的设备空间利用率高,经济性较好。此外,普通的拉压式弹簧生产技术较为成熟,经济性高,生产周期短,可实现快速迭代以满足用户的需求。
6.具体地,该力感设备包括壳体,该壳体具有输入端;以及位于壳体内的力感机构,其中力感机构包括:输入齿轮,该输入齿轮包括输入轴以及安装在输入轴上的第一齿轮盘,其中,输入轴连接于输入端,使得第一齿轮盘和输入轴随输入端的运动而旋转;过渡齿轮,过渡齿轮包括齿部和相对的侧表面,齿部与第一齿轮盘啮合,使得过渡齿轮随第一齿轮盘的运动而运动;固定部分,固定部分包括内表面,固定部分将过渡齿轮接纳在其中;以及两组弹簧,每组弹簧包括至少一根弹簧,且每组弹簧数量相同,其中一组弹簧设置在过渡齿轮的相对的侧表面中的一个处,并且另一组弹簧设置在相对的侧表面中的另一个处,其中,两组弹簧中的每一根弹簧的端面接触过渡齿轮的侧表面和固定部分的内表面,使得当过渡齿轮运动时,两组弹簧共同提供人工感觉力。
7.此外,力感机构还包括配平齿轮,并且固定部分具有齿部,配平齿轮与固定部分的
齿部啮合,其中,固定部分的齿部与过渡齿轮的齿部的齿定向相反。由此使用者可以进行配平操作。
8.优选地,壳体具有配平接口,使得配平齿轮连接于配平电机。由此使用者可以通过按压配平开关来实现配平输入。
9.此外,力感机构还包括ap伺服齿轮,并且输入齿轮还包括安装在输入轴上的第二齿轮盘,ap伺服齿轮与第二齿轮盘啮合。
10.优选地,壳体具有ap伺服接口,使得ap伺服齿轮连接于ap伺服电机,以实现接通或断开自动飞行指令的操作。
11.在一种优选的实施例中,壳体的输入端是圆盘结构或连杆结构。该圆盘结构或连杆结构可旋转以将旋转运动传递至输入轴。
12.在一种实施例中,过渡齿轮包括上轴和下轴,并且固定部分包括通孔,上轴和下轴设置成被引导穿过通孔,以允许过渡齿轮沿着通孔的方向运动。
13.进一步地,过渡齿轮设置成随着第一齿轮盘的旋转而沿竖直方向运动,并且其中,固定部分设置成随着配平齿轮的旋转而沿竖直方向运动。
14.优选地,两组弹簧套设在上轴和/或下轴上,使得弹簧提供仅沿着过渡齿轮的运动方向的压缩力。
15.在一种实施例中,固定部分包括凹槽,由此可以通过将上轴和/或下轴放置到凹槽中来将过渡齿轮安装到固定部分中。并且力感机构还包括卡块,卡块固定在凹槽中,以形成引导过渡齿轮的上轴和/或下轴的通孔。
16.所描述的力感设备的额外特征和优点将在下文的详细描述中陈述,并且通过下文对于本领域技术人员显然或者从通过实践本文所描述的实施例而被本领域技术人员认识到,这些描述包括下文的详细描述、权利要求书、以及附图。
附图说明
17.参考以上目的,本发明的技术特征在下面的权利要求中清楚地描述,并且其优点从以下参照附图的详细描述中显而易见,附图以示例方式示出了本发明的优选实施例,而不限制本发明构思的范围。
18.图1示出了根据本发明的一种实施例的力感设备的立体图;以及
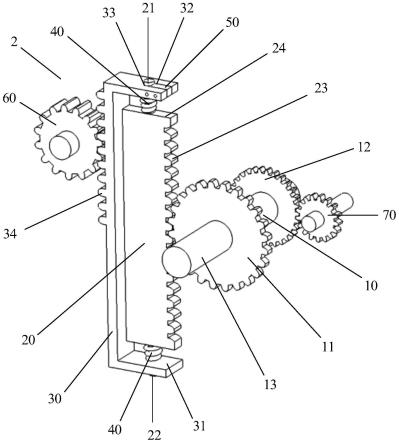
19.图2示出了根据本发明的图1的力感设备内部的力感机构的示意图。
20.附图标记
[0021]1ꢀꢀ
力感设备
[0022]2ꢀꢀ
力感机构
[0023]3ꢀꢀ
输入端
[0024]
10 输入齿轮
[0025]
11 第一齿轮盘
[0026]
12 第二齿轮盘
[0027]
13 输入轴
[0028]
20 过渡齿轮
[0029]
21 上轴
[0030]
22 下轴
[0031]
23 齿部
[0032]
24 侧表面
[0033]
30 固定部分
[0034]
31 内表面
[0035]
32 凹槽
[0036]
33 通孔
[0037]
34 齿条
[0038]
40 弹簧
[0039]
50 卡块
[0040]
60 配平齿轮
[0041]
70 ap伺服齿轮
具体实施方式
[0042]
以下将结合附图对本发明的优选实施例进行详细说明,以便更清楚理解本发明的目的、特点和优点。
[0043]
本文中使用的术语“上”、“下”、“竖直”等方向是参考设备在使用时从使用者视角看到的方向。
[0044]
本文中使用的术语“齿轮”是指各种类型的齿轮或齿轮组件的总称,例如齿轮盘、齿条、齿圈、前述类型的齿轮与轴的组合等,并且不一定指代具体类型的齿轮。
[0045]
本文中使用的术语“齿定向”是指齿轮的齿所突出的方向。
[0046]
本文中使用的术语“连接”可以包括直接连接,也可以包括间接连接。
[0047]
图1示出了根据本发明的一种实施例的力感设备1的立体图,该力感设备包括壳体1以及位于壳体内的力感机构2。该力感机构2可以提供飞行员操纵感觉力。
[0048]
以下结合图2对力感机构2进行详细描述。
[0049]
如图2所示,力感机构2包括输入齿轮10,该输入齿轮包括输入轴13以及第一齿轮盘11,第一齿轮盘11安装在输入轴13上,使得第一齿轮盘11与输入轴13一起旋转。输入轴13联接于输入端3(参见图1),使得第一齿轮盘11和输入轴13随输入端3的运动而旋转。在本实施例中,输入端3为一圆盘结构,但应当理解的是,诸如连杆机构之类的其它结构同样可以使输入轴产生旋转运动。
[0050]
力感机构2还包括过渡齿轮20,在图2所示的实施例中,该过渡齿轮20是齿条类型的齿轮,其包括齿部23和相对的侧表面24,齿部23与第一齿轮盘11啮合,使得过渡齿轮20随第一齿轮盘11的运动而运动。
[0051]
过渡齿轮20被接纳在固定部分30中,在图2所示的实施例中,该固定部分30是呈现出u形框架的形状,并且包括内表面31。但应当理解的是,固定部分可以是用于接纳过渡齿轮20的任何合适的形状。
[0052]
在图2所示的实施例中,过渡齿轮20包括上轴21和下轴22,并且固定部分包括通孔33,通孔设置成从固定部分30的内表面31沿远离过渡齿轮20的侧表面24穿过固定部分30,使得上轴21和下轴22可以被引导穿过通孔33,以允许过渡齿轮20沿着通孔33的方向运动。
具体地,在该实施例中,上轴21、下轴22和通孔33都是沿竖直方向设置的,使得过渡齿轮20设置成随着第一齿轮盘11的旋转而沿竖直方向运动。
[0053]
为了将过渡齿轮20安装到固定部分30中,固定部分30可开设有凹槽32,该凹槽32是u型槽,其允许将过渡齿轮20的上轴21放置到凹槽32中。应当理解的是,虽然在该实施例中,凹槽32形成为放置上轴21,但是凹槽32也可以附加或替代地形成为放置下轴22。
[0054]
可选地,可通过卡块50与固定部分30的凹槽32装配的方式来形成引导过渡齿轮20的上轴21和/或下轴22的通孔33,具体地,卡块50诸如通过两个螺栓孔与固定部分30连接来固定在凹槽32中,当然卡块50也可以通过其它适当的方式装配到固定部分30的凹槽32中。
[0055]
应当理解的是,虽然在该实施例中,过渡齿轮20包括一个上轴21和一个下轴22,但是在其它实施例中,过渡齿轮20可以包括多于一个上轴和/或多于一个下轴,并且固定部分30可以具有对应于上轴和下轴数量的多个通孔。在另外的实施例中,过渡齿轮20可以没有上轴和/或下轴。在又一种实施例中,过渡齿轮20可以通过被接纳在固定部分30的引导滑槽中来运动而不使用轴和通孔的构造。进一步地,应当注意的是,在该实施例中,过渡齿轮20的上轴21和下轴22沿竖直方向对准,但这仅仅是示例而非限制,并且在其它实施例中,过渡齿轮的上轴和下轴可以不对准。
[0056]
在该实施例中,两个弹簧40设置在过渡齿轮20的侧表面和固定部分30的内表面31之间并与上述侧表面和内表面接触,具体地,其中一个弹簧设置在过渡齿轮20的相对的侧表面24中的一个处,并且另一个弹簧设置在相对的侧表面24中的另一个处。优选地,弹簧40套设在过渡齿轮20的上轴21和/或下轴22上,使得弹簧40提供仅沿着过渡齿轮20的运动方向的压缩力。由此,当使用者进行操作时,产生的机械运动通过输入端3转换成旋转运动并输入,使输入轴13带着第一齿轮盘11旋转,进而使与第一齿轮盘11的过渡齿轮20运动,过渡齿轮20运动时,两个弹簧40提供弹簧力,两个弹簧力之差即为人工感觉力。两个弹簧40安装后处于预压缩状态且压缩量相同,产生方向相反的弹簧力,此时过渡齿轮20平衡在某一位置,此时的位置设定为中立位。
[0057]
在其它实施例中,可存在两组弹簧,每组弹簧包括至少一根弹簧,且每组弹簧数量相同,其中一组弹簧设置在过渡齿轮的相对的侧表面24中的一个处,并且另一组弹簧设置在相对的侧表面24中的另一个处,其中,两组弹簧中的每一根弹簧的端面接触过渡齿轮的侧表面和固定部分的内表面,使得当过渡齿轮运动时,两组弹簧共同提供人工感觉力。同样,两组弹簧可以优选地套设在上轴21和/或下轴22上。
[0058]
继续参照图2,该力感机构2还包括配平齿轮60,并且固定部分30具有齿部,配平齿轮60与固定部分30的齿部啮合。具体地,固定部分30的齿部与过渡齿轮20的齿部的齿定向相反,这使得所述固定部分能够随着所述配平齿轮的旋转而沿竖直方向运动
[0059]
壳体1具有配平接口(未示出),使得配平齿轮60联接于配平电机。由此使用者可以通过按压配平开关来实现配平输入。当使用者不按压配平开关时,配平齿轮60位置锁定,即配平齿轮60不产生运动,此时力感机构如上所述产生感觉力。当使用者按压配平开关且不进行操作时,配平齿轮60的旋转运动将传递到输入齿轮1并使其产生旋转运动,最终的表现形式为按压配平开关后,驾驶舱内的操纵器件呈现随动状态。
[0060]
继续参照图2,力感机构还包括ap伺服齿轮70,并且输入齿轮10还包括安装在输入轴上的第二齿轮盘12,ap伺服齿轮与第二齿轮盘12啮合,使得ap伺服齿轮70的运动带动输
入齿轮10的运动,进而带动过渡齿轮20的运动。
[0061]
壳体1具有ap伺服接口(未示出),使得ap伺服齿轮70联接于ap伺服电机。当使用者接通自动飞行指令时,配平电机不工作,因此配平齿轮60和固定部分30的位置均被锁定,ap伺服电机带动ap伺服齿轮70,ap伺服齿轮70的运动将传递到过渡齿轮20运动,运动的过渡齿轮20会使弹簧40将压缩量增大,另一个压缩量减小,当断开自动飞行指令时,由于弹簧40的压缩量不同,因此两个弹簧产生的合力将推动过渡齿轮4回到初始位置(中立位),从而为操纵器件提供回中力。
[0062]
本发明的力感设备利用传统的拉压弹簧为模块化设备提供力感并通过弹簧力的作用可实现定中。所利用的传统拉压弹簧耐久性好,技术成熟度高,工艺控制简单且制造成本低,可随时更改弹簧参数,使弹簧力满足操纵者的操纵力需求。可根据系统传动比的需要来合理设计本发明中各个齿轮的参数,本发明的设计方法合理利用了空间,使得模块内部的结构更加紧凑,体积更小。
[0063]
虽然以上结合了较佳实施例对本发明的结构和安装方法进行了说明,但是本技术领域中的普通技术人员应当认识到,上述示例仅是用来说明的,而不能作为对本发明的限制。因此,可以对本发明进行修改和变型,这些修改和变型都将落在本技术所附权利要求书所限定的范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
