1.本发明涉及航天器光学设备技术领域,特别涉及是一种空间大口径反射镜的背部三点支撑结构。
背景技术:
2.随着人类探索和认知宇宙的深入,利用空间望远镜进行天文和地球观察越来越受到重视。随着空间技术的不断发展,对空间望远镜分辨率的要求不断提高,大口径、长焦距成为空间望远镜的主要趋势。望远镜中的光学元件组件是整个光学系统的核心部件,它们的静力学和动力学指标性能直接关系到整个望远镜的成像质量。静力学指标包括:镜面面形精度和空间定位能力(镜体刚体位移、镜体倾角);动力学指标包括:基频、动态应力和抗疲劳性能。
3.传统的背部三点的支撑主要包括镜体、连接螺钉、定位销钉、锥套和柔节,上述除镜体外的零件形成支撑结构,支撑结构为三组,绕圆周方向120度分布。
4.大口径反射镜轻量化设计过程中在减少镜体重量的同时降低了反射镜的刚度,使其易于受到外界环境如重力载荷、温度载荷以及反射镜组件装配误差等扰动的影响。重力载荷下的面形变化与柔性支撑结构在镜体光轴方向的支撑位置关系密切,当柔节的球铰转动中心与镜体的中性面位置重合时,镜组件重力面形最优。反射镜组件的装配误差和温度载荷带来的面形大小变化主要与柔节的柔性和柔性方向相关。在重力载荷下刚体位移不超出设计要求的前提下,支撑结构的径向和轴向柔度越大,分别对温度载荷和装配误差的敏感度越小,即面形越优;对动力学指标来讲,支撑柔度过大,将导致反射镜组件基频过低,动态响应增加,柔性环节处会产生过大的动态应力,容易使支撑受到强度破坏或疲劳破坏而失效。静、动力学指标的相互矛盾之处是柔节设计难点。因此,确定合理的设计柔节的结构形式,使得反射镜综合性能最优,是柔节设计的核心思想。
技术实现要素:
5.本发明为解决上述问题,本发明的目的在于提供适用空间大口径反射镜的背部支撑、具备优良静、动力学性能的天基大口径反射镜稳定的支撑结构。
6.为实现上述目的,本发明采用以下具体技术方案:
7.包括反射镜和支撑反射镜背部的三组支撑组件;
8.支撑组件包括锥套和柔节;
9.锥套和反射镜固定连接;
10.柔节依次包括锥套连接法兰、柔节柔性部分、柔节刚性部分和对外连接法兰;
11.锥套连接法兰与锥套固定连接;
12.柔节柔性部分为倒置的并联式三脚架结构。
13.进一步的,柔节柔性部分包括三个支腿;
14.锥套连接法兰的厚度方向上开设有六个槽体,支腿的一端设置在两个槽体之间。
15.进一步的,三个支腿在柔节刚性部分上交于一点,三个支腿构成并联式三脚架结构;
16.支腿和槽体使柔节具有转动柔性和平动柔性。
17.进一步的,锥套和锥套连接法兰通过连接螺钉和定位销钉固定连接。
18.进一步的,锥套和反射镜通过环氧树脂胶粘接。
19.进一步的,反射镜的镜体材料为碳化硅,锥套的材料为热膨胀系数与镜体材料一致的殷钢,柔节的材料为钛合金。
20.进一步的,柔节刚性部分为空心圆柱体以减轻柔节的重量。
21.本发明能够取得以下技术效果:该种支撑结构在缓解温度载荷与装配误差引入的镜面面形误差变化方面效果显著,有效保证静力学性能的同时不降低基频,能够降低动态应力和响应振幅,提升组件疲劳寿命。从根本上解决采用背部三点支撑的反射镜组件的静、动力学性能对支撑结构刚柔要求不一致带来的矛盾,实现对大口径反射镜的背部三点高性能支撑。
附图说明
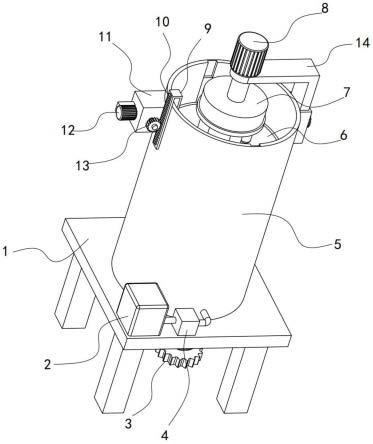
22.图1是本发明提供的支撑结构的后视图;
23.图2是图1的a-a处的剖视图;
24.图3是本发明提供的反射镜组件的截面示意图;
25.图4是本发明提供的柔节的立体结构示意图;
26.图5是本发明提供的柔节的平面结构示意图;
27.图6是本发明提供的柔节的俯视结构示意图;
28.图7是本发明提供的三组柔节的安装方向示意图。
29.附图标记:
30.镜体1、连接螺钉2、定位销钉3、锥套4、柔节5、锥套连接法兰6、槽体61、柔节刚性部分7、柔节刚性部分8、对外连接法兰9。
具体实施方式
31.为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及具体实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅用以解释本发明,而不构成对本发明的限制。
32.如图1-3所示的一种空间大口径反射镜的背部三点支撑结构,包括反射镜和三组支撑组件,支撑组件包括锥套4和柔节5。是一种应用于空间大口径反射镜背部三点支撑的并联式三脚架柔性支撑结构。
33.其中,锥套4和反射镜固定连接。反射镜上绕圆周方向均匀设置三个锥孔,三组支撑组件分别设置在锥孔内。锥套4与锥孔相匹配,优选锥套通过连接螺钉2和定位销钉3与柔节固定连接。使用时,支撑结构包括反射镜、锥套4、连接螺钉2、定位销钉3和柔节5,其中锥套4、连接螺钉2、定位销钉3和柔节5组成柔性的支撑组件,三组支撑组件同时使用,共同支撑反射镜。
34.其中,如图4-6所示的柔节5,其从上到下、靠近反射镜到远离反射镜的方向依次包
括锥套连接法兰6、柔节柔性部分7、柔节刚性部8和对外连接法兰9。
35.具体的,锥套连接法兰6与锥套固定连接,优选为前述的连接螺钉2和定位销钉3与锥套连接法兰6固定连接。优选柔节5一体成型,锥套连接法兰6、柔节柔性部分7、柔节刚性部8和对外连接法兰9为一体加工。优选的,柔节柔性部分7为倒置的并联式三脚架,并联式三脚架的三个支腿是向靠近反射镜的方向发散的,即每个支腿靠近锥套连接法兰6的一端向外,而每个支腿靠近柔节刚性部分8的另一端向内。采用倒置的并联式三脚架柔性球铰支撑结构,其具有优良的适应温度载荷、重力载荷和装配误差的能力。更为优选的,如图7所示三个柔节的支腿长度方向最后交于点o,点o也位于柔节的轴线上,三个支腿在柔节刚性部分的前端汇聚成一点o,三个支腿在该点o处集成一体,三条支腿构成一个三脚架结构。这种结构的支腿使柔节柔性部分7具有了球铰的功能。
36.本发明中提出的并联三角架的柔性结构,大大提升了天基大口径背部三点支撑反射镜组件的静、动力学支撑性能。该结构可以有效支撑2m口径及其以下的天基大口径反射镜。本发明中的倒置的并联三角架球铰柔性支撑结构应用于大口径背部三点支撑的反射镜。因此,需要三组支撑同时使用,并且三组支撑的安装方式固定,如图7所示,每个柔节的倒置的并联式三脚架的三条支腿为120度圆周分布,三个支腿在镜体1内的安装位置是:一条支腿沿着重力相反方向安装,三个柔节安装方向一致,受力相同。
37.更为具体的,锥套连接法兰6厚度方向上开设有六个槽体61,即每个槽体61是沿柔节长度方向贯通的孔。槽体61的设计增加了柔节在径向的柔性。其功能类似给支腿增加了移动副(p)。移动副是通过在柔节的锥套连接法兰6上开槽,提高柔性实现的,以获得柔节径向移动的能力,如图6所示。
38.支腿的一端设置在两个槽体61之间,即支腿的一端延伸到两个槽体61之间的位置,优选两个槽体61关于支腿对称布置。这样支腿包括两个虎克铰和一个移动副的功能。柔节柔性部分7由3个支腿组成,三个支腿在柔节刚性部分的前端汇聚成一点,构成一个三脚架结构。每个支腿又由上下两个虎克铰(u)和一个移动副(p)组成。该柔节(3puu柔节)提供转动柔性和一定的平动柔性,且具有很高的轴向刚度。柔节的其余结构定义为刚性段,起连接作用。
39.优选的,锥套4套在柔节的外部。
40.优选的,反射镜的镜体材料为碳化硅,锥套4的材料为热膨胀系数与所述镜体材料一致的殷钢以提高热稳定性,柔节5的材料为钛合金(tc17)。
41.优选的,柔节刚性部分8为空心圆柱体以减轻柔节5的重量。支腿的一端连接锥套连接法兰6的底面,支腿的一端连接柔节刚性部分8的顶面。
42.大口径反射镜轻量化设计过程中在减少镜体重量的同时降低了反射镜的刚度,使其易于受到外界环境如重力载荷、温度载荷以及反射镜组件装配误差等扰动的影响。重力载荷下的面形变化与柔性支撑结构在镜体光轴方向的支撑位置关系密切,当柔节的球铰转动中心与镜体的中性面位置重合时,镜组件重力面形最优。柔节保证镜组件的静力学性能,包括:温度载荷、重力载荷和装配误差引入的镜面面形误差变化,保证镜体的刚体位移和倾角变化。动力学特性,包括:基频、动应力和疲劳特性。
43.在本说明书的描述中,参考术语“一个实施例”、“一些实施例”、“示例”、“具体示例”、或“一些示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特
点包含于本发明的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不必须针对的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任一个或多个实施例或示例中以合适的方式结合。此外,在不相互矛盾的情况下,本领域的技术人员可以将本说明书中描述的不同实施例或示例以及不同实施例或示例的特征进行结合和组合。
44.尽管上面已经示出和描述了本发明的实施例,可以理解的是,上述实施例是示例性的,不能理解为对本发明的限制。本领域的普通技术人员在本发明的范围内可以对上述实施例进行变化、修改、替换和变型。
45.以上本发明的具体实施方式,并不构成对本发明保护范围的限定。任何根据本发明的技术构思所做出的各种其他相应的改变与变形,均应包含在本发明权利要求的保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。