1.本发明涉及换电设备及换电方法技术领域,尤其是指一种电池包传输控制方法及系统。
背景技术:
2.当前的主流换电站中,比较常用的电池包输送方式是利用rgv或输送线的方式传输电池包,其中利用rgv传输已经比较成熟,但是还有一些特殊的换电站需要使用输送线进行传输,在传统的输送线传输过程中,由于输送距离过长,很难使用一段输送线来达到输送电池的目的,需使用两段或三段输送线甚至更多,而使用到多段输送线的情况下,经常会出现电池在经过一段输送线到另一段输送线时出现打滑或左右偏移的状况,导致电池输送到位后位置不准确,无法进行加解锁或输送入仓的动作。
技术实现要素:
3.为此,本发明所要解决的技术问题在于克服现有技术中输送线多段线体对接传输中存在的缺陷,提供一种电池包传输控制方法及系统,通过对多段线体的监控和调节,实现多段线体之间的配合,有效解决了多段线体带来的打滑或左右偏移的状况。
4.为解决上述技术问题,本发明提供了一种电池包传输控制方法,包括如下步骤:
5.步骤一、确定输送线的传输方向,设定输送线中各个线体的传输速度;
6.步骤二、对输送线的设定状态及输送线上物料的分布情况进行监控自检,确认输送线是否满足运行条件;
7.步骤三、根据步骤一确定的传输方向和设定的传输速度开启第n段线体和第n 1段线体,检测物料在传输线上的位置,如物料到达第n 1段线体则关闭第n段线体、开启第n 2段线体,如物料没有到达第n 1段线体,则对第n段线体和第n 1段线体进行调节和异常处理,直到物料到达第n 1线体,其中,n为正整数;
8.步骤四、重复上述步骤三,检测直到物料到达最后一段线体,输送线停止运行。
9.在本发明的一个实施例中,在步骤一中,设定各个线体的传输方向和传输速度相同。
10.在本发明的一个实施例中,在步骤二中监控输送线的设定状态包括监控输送线信号的接收状态、监控输送线自身的运行状态、监控输送线信号采集状态。
11.在本发明的一个实施例中,在步骤二中,根据输送线上物料的分布情况,当物料分布在同一个线体上时,物料分布为正常情况,当物料分布在两个线体或两个以上的线体上时,物料分布为异常情况。
12.在本发明的一个实施例中,在步骤三中,如物料没有到达第n 1段线体,检测第n段线体和第n 1段线体的运行速度,如果第n段线体和第n 1段线体速度相同,则不作干预,如果第n段线体和第n 1段线体速度不同,则调节第n段线体和第n 1段线体速度,使之运行速度相同。
13.在本发明的一个实施例中,在步骤三中,如物料没有到达第n 1段线体,监控第n段线体和第n 1段线体的运行时是否异常报警,如没有异常报警,则不作干预,如果出现异常报警,则根据报警情况对异常进行处理。
14.在本发明的一个实施例中,所述异常报警情况包括过载、过电流、运行超时。
15.为解决上述技术问题,本发明还提供了一种电池包传输控制系统,用于实现上述控制方法,所述控制系统包括:
16.信号采集模块,用于采集输送线上物料的位置;
17.线体控制模块,用于控制各段线体上电机的运行状态,并通过速度以及扭矩对其进行调节;
18.线体监控模块,用于监控各段线体上电机运行的实时速度和扭矩,当线体出现异常时报警;
19.异常处理模块,用于接收系统下发的各类报警,并对报警进行处理。
20.在本发明的一个实施例中,所述信号采集模块包括设置在输送线上的到位检测传感器、减速传感器、在位检测传感器和越位检测传感器。
21.为解决上述技术问题,本发明还提供了一种电池包输送线,包括上述控制系统。
22.本发明的上述技术方案相比现有技术具有以下优点:
23.本发明所述的电池包传输控制方法,对输送线上的每个线体进行单独设定和控制,通过监控物料在线体上的实时位置,对输送线上多个线体之间的配合情况进行整合调控,利用实时运行过程中的监控干预功能,实现多段线体之间调节,有效解决了多段线体带来的打滑或左右偏移的状况,同时多段线体的分段运行以及异常处理功能,减少了人为对系统的干预,也有利于节省换电站的运营成本。
24.本发明所述的电池包传输控制系统为了能够实现上述控制方法,设置信号采集模块,用于采集输送线上物料的位置;设置线体控制模块,用于控制各段线体上电机的运行状态,并通过速度以及扭矩对其进行调节;设置线体监控模块,用于监控各段线体上电机运行的实时速度和扭矩,当线体出现异常时报警;设置异常处理模块,用于接收系统下发的各类报警,并对报警进行处理;该系统构造简单实用,在成本上有很大的优势,有利于在换电站内的大面积推广。
25.本发明所述的输送线能够配置上述控制系统,完成上述控制方法,实现对电池包在换电站内的快速、完全、精确运输。
附图说明
26.为了使本发明的内容更容易被清楚的理解,下面根据本发明的具体实施例并结合附图,对本发明作进一步详细的说明,其中
27.图1是本发明的电池包传输控制方法的步骤流程图;
28.图2是本发明的电池包传输控制系统的原理图;
29.图3是本发明的输送线上信号采集模块分布的结构示意图。
30.说明书附图标记说明:11、到位检测传感器;12、减速传感器;13、在位检测传感器;14、越位检测传感器。
具体实施方式
31.下面结合附图和具体实施例对本发明作进一步说明,以使本领域的技术人员可以更好地理解本发明并能予以实施,但所举实施例不作为对本发明的限定。
32.本发明的电池包传输控制方法,包括如下步骤:
33.步骤一、确定输送线的传输方向,设定输送线中各个线体的传输速度;
34.步骤二、对输送线的设定状态及输送线上物料的分布情况进行监控自检,确认输送线是否满足运行条件;
35.步骤三、根据步骤一确定的传输方向和设定的传输速度开启第n段线体和第n 1段线体,检测物料在传输线上的位置,如物料到达第n 1段线体则关闭第n段线体、开启第n 2段线体,如物料没有到达第n 1段线体,则对第n段线体和第n 1段线体进行调节和异常处理,直到物料到达第n 1线体,其中,n为正整数;
36.步骤四、重复上述步骤三,检测直到物料到达最后一段线体,输送线停止运行;
37.本发明的电池包传输控制方法,对输送线上的每个线体进行单独设定和控制,通过监控物料在线体上的实时位置,对输送线上多个线体之间的配合情况进行整合调控,利用实时运行过程中的监控干预功能,实现多段线体之间调节,有效解决了多段线体带来的打滑或左右偏移的状况,同时多段线体的分段运行以及异常处理功能,减少了人为对系统的干预,也有利于节省换电站的运营成本。
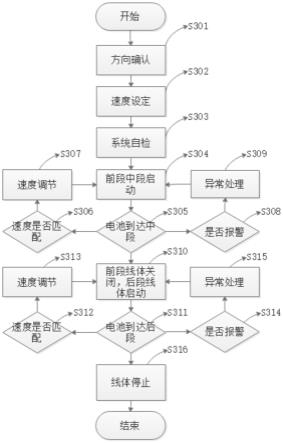
38.参照图1所示,本发明的输送线根据实际的长度,设置三段线体或更多的线体进行拼接,为了方便说明,以三段线体为例进一步说明:
39.实施例1
40.s301、根据实际的输送情况,确定输送线的传输方向,本实施例的输送线设置在换电站内使用,在换电站内需要将馈电电池从换电设备运输到充电仓中,同时也需要将满电电池从充电仓中运输到换电设备中,因此输送线是需要双向传送的,因此在输送线运行前需要接收到主控系统传达的方向指令,来进一步确定输送方向;本实施例中,设置三段线体,需要保证三段线体的运输方向相同。
41.s302、在确定好传输方向后,还需要确定传输速度,根据需要输送物料质量、体积、稳定性等条件确定输送线的传输速度,具体地,所述传输速度可以采用档位的方式进行调节,例如低档、中档、高档,一档、二档、三挡的形式,也可以采用数值的方式调节,例如1m/s、2m/s、3m/s等多种方式;本实施例中包含三段线体,需要设定三段线体的初始速度相同。
42.s303、对输送线的设定状态及输送线上物料的分布情况进行监控自检,确认输送线是否满足运行条件;
43.具体地,监控输送线的设定状态包括监控输送线信号的接收状态、监控输送线自身的运行状态、监控输送线信号采集状态;其中,输送线信号的接收状态包括输送线能否接收到上述步骤s301和s302发送的运输方向信息和运输速度信息,以及输送线中每个线体接收到的信息是否一致,如果不一致,出现运输方向相反或者运输速度异常的情况都会报警,上传错误运行报告;输送线自身的运行状态包括输送线自身驱动组件、联动组件的参数情况,当驱动组件、联动组件异常时,导致输送线无法运行时,也会上传报警信号;输送线信号采集包括设置在输送线上用于采集物料位置的多类型的传感单元,监控传感单元能够正常的接收和发送信号,如传感单元的工作出现异常,也会上传报警信号;
44.具体地,为了安全考虑,需要监控输送线上物料的分布情况,当物料分布在同一个线体上时,物料分布为正常情况,可以开启输送线开始运输物料,因为本发明的电池包传输控制方法采用的是第n段线体和第n 1段线体同时开启,当只有一段线体上检测到物料时,物料沿着输送线传输不会与其它物料碰撞;当物料分布同时分布在两个线体上时,物料分布为异常情况,以本实施例的三段线体为例,当第一段和第三段线体上都有物料时,由于第三段线体为最后一段线体,物料到达最后一段线体时,输送线停止运行,因此当输送线上检测到两个物料分别位于两段线体上时,输送线处于异常状态,输送线不会开启,需要把第三段上的物料取下后,输送线才能正常运行,这也是为了输送线上的安全考虑,由于本输送线是用于运输电池,一定要避免电池之间发生碰撞。
45.s304、在自检完成后,在都满足运行调节的情况下,根据步骤s301和s302发送的运输方向信息和运输速度信息,启动第一段线体和第二段线体。
46.s305、在输送线运行的过程中,实时检测物料在传输线上的位置,如果物料在正常运行的时间内,从第一段线体传输到第二段线体,则说明物料在第一段线体和第二段线体上能够正常运输。
47.s310、在能够正常运输的情况下,则关闭第一段线体、开启第二段线体和第三段线体,使物料在第二段线体和第三段线体上运输。
48.s311、在输送线运行的过程中,继续实时检测物料在传输线上的位置,如果物料在正常运行的时间内,从第二段线体传输到第三段线体,则说明物料在第二段线体和第三段线体上能够正常运输,物料到达第三段线体上。
49.s316、本实施例中,第三段线体为最后一段线体,当物料到达第三段线体后,输送线停止,完成运输动作。
50.该实施例为输送线正常工作的情况,物料在输送线上以预设的方向、预设的速度完成在三段线体上的运输。
51.实施例2
52.其中,步骤s301、s302、s303、s304与实施例1的步骤相同,在此不重复说明;
53.s305、在输送线运行的过程中,实时检测物料在传输线上的位置,如果物料在正常运行的时间内,没有从第一段线体传输到第二段线体,则说明物料在第一段线体和第二段线体上不能够正常运输。
54.s306、在第二段线体上检测不到物料,此时有可能出现的情况是,第一段线体与第二段线体速度不匹配出现了打滑的情况,物料卡在第一段线体和第二段线体之间,此时检测第一段线体和第二段线体的运行速度,如果第一段线体和第二段线体速度相同,则不作干预,则排除速度不匹配的可能情况,可以等待物料继续在第一段线体和第二段线体之间继续传输,有可能是物料重量过大,导致线体运行速度减慢的情况,在预设的时间内没有完成运输,此时只需等待物料正常传输即可。
55.s307、如果检测到第一段线体和第二段线体速度不同,则调节第一段线体和第二段线体速度,使之运行速度相同,调节速度相同后,等待物料传输到第二段线体上。
56.在物料传输到第二段线体上后,执行上述实施例1中的步骤s310、s311、s316,在此不重复阐述。
57.该实施例为第一段线体和第二段线体在传输过程中出现的速度不匹配的情况下,
本发明的控制方法执行的调节步骤。
58.实施例3
59.其中,步骤s301、s302、s303、s304、s305、s310与实施例1的步骤相同,在此不重复说明;
60.s311、在输送线运行的过程中,继续实时检测物料在传输线上的位置,如果物料在正常运行的时间内,没有从第二段线体传输到第三段线体,则说明物料在第二段线体和第三段线体上不能够正常运输。
61.s312、在第三段线体上检测不到物料,此时有可能出现的情况是,第二段线体与第三段线体速度不匹配出现了打滑的情况,物料卡在第二段线体和第三段线体之间,此时检测第二段线体和第三段线体的运行速度,如果第二段线体和第三段线体速度相同,则不作干预,则排除速度不匹配的可能情况,可以等待物料继续在第二段线体和第三段线体之间继续传输,有可能是物料重量过大,导致线体运行速度减慢的情况,在预设的时间内没有完成运输,此时只需等待物料正常传输即可。
62.s313、如果检测到第二段线体和第三段线体速度不同,则调节第二段线体和第三段线体速度,使之运行速度相同,调节速度相同后,等待物料传输到第三段线体上。
63.在物料传输到第三段线体上后,执行上述实施例1中的步骤s316,在此不重复阐述。
64.该实施例为第二段线体和第三段线体在传输过程中出现的速度不匹配的情况下,本发明的控制方法执行的调节步骤。
65.实施例4
66.其中,步骤s301、s302、s303、s304与实施例1的步骤相同,在此不重复说明;
67.s305、在输送线运行的过程中,实时检测物料在传输线上的位置,如果物料在正常运行的时间内,没有从第一段线体传输到第二段线体,则说明物料在第一段线体和第二段线体上不能够正常运输。
68.s306、在第二段线体上检测不到物料,此时有可能出现的情况是,第一段线体与第二段线体速度不匹配出现了打滑的情况,物料卡在第一段线体和第二段线体之间,此时检测第一段线体和第二段线体的运行速度,如果第一段线体和第二段线体速度相同,则不作干预,则排除速度不匹配的可能情况。
69.s307、如果检测到第一段线体和第二段线体速度不同,则调节第一段线体和第二段线体速度,使之运行速度相同,调节速度相同后,等待物料传输到第二段线体上。
70.s308、如在进行上述速度匹配检测和调节后,物料仍没有到达第二段线体,则监控第一段线体和第二段线体的运行时是否异常报警,如没有异常报警,则不作干预,则排除线体异常运行的情况,可以等待物料继续在第一段线体和第二段线体之间继续传输,有可能是物料重量过大,导致线体运行速度减慢的情况,在预设的时间内没有完成运输,此时只需等待物料正常传输即可。
71.s309、如果出现异常报警,则根据报警情况对异常进行处理;
72.具体地,所述异常报警情况包括过载、过电流、运行超时,例如出现过载和过电流的情况,说明电池包有可能在两段中间位置时存在打滑,需在报警发生时复位电机报警,监控两段线体的速度是否一致,并及时调整两段线体速度;例如出现超时报警的情况,在规定
的时间内没有完成传输,可能检测传感器感应异常或电池包出现卡顿,需加大扭矩或更换感应器处理。
73.在物料传输到第二段线体上后,执行上述实施例1中的步骤s310、s311、s316,在此不重复阐述。
74.该实施例为第一段线体和第二段线体在传输过程中出现异常报警的情况下,本发明的控制方法执行的调节步骤。
75.实施例5
76.其中,步骤s301、s302、s303、s304、s305、s310与实施例1的步骤相同,在此不重复说明;
77.s311、在输送线运行的过程中,继续实时检测物料在传输线上的位置,如果物料在正常运行的时间内,没有从第二段线体传输到第三段线体,则说明物料在第二段线体和第三段线体上不能够正常运输。
78.s312、在第三段线体上检测不到物料,此时有可能出现的情况是,第二段线体与第三段线体速度不匹配出现了打滑的情况,物料卡在第二段线体和第三段线体之间,此时检测第二段线体和第三段线体的运行速度,如果第二段线体和第三段线体速度相同,则不作干预,则排除速度不匹配的可能情况。
79.s313、如果检测到第二段线体和第三段线体速度不同,则调节第二段线体和第三段线体速度,使之运行速度相同,调节速度相同后,等待物料传输到第三段线体上。
80.s314、如在进行上述速度匹配检测和调节后,物料仍没有到达第三段线体,则监控第二段线体和第三段线体的运行时是否异常报警,如没有异常报警,则不作干预,则排除线体异常运行的情况,可以等待物料继续在第二段线体和第三段线体之间继续传输,有可能是物料重量过大,导致线体运行速度减慢的情况,在预设的时间内没有完成运输,此时只需等待物料正常传输即可。
81.s315、如果出现异常报警,则根据报警情况对异常进行处理;
82.具体地,所述异常报警情况包括过载、过电流、运行超时,例如出现过载和过电流的情况,说明电池包有可能在两段中间位置时存在打滑,需在报警发生时复位电机报警,监控两段线体的速度是否一致,并及时调整两段线体速度;例如出现超时报警的情况,在规定的时间内没有完成传输,可能检测传感器感应异常或电池包出现卡顿,需加大扭矩或更换感应器处理。
83.在物料传输到第三段线体上后,执行上述实施例1中的步骤s316,在此不重复阐述。
84.该实施例为第二段线体和第三段线体在传输过程中出现异常报警的情况下,本发明的控制方法执行的调节步骤。
85.实施例6
86.参照图2所示,本发明的电池包传输控制系统,用于实现上述控制方法,所述控制系统包括:
87.信号采集模块,用于采集输送线上物料的位置,在每段线体的不同位置上设置不同类型的传感器,实施监控物料在传输线上的位置,并根据物料的位置执行不同的控制方法;
88.线体控制模块,用于控制各段线体上电机的运行状态,并通过速度以及扭矩对其进行调节,接收上位机的控制指令,能够调节各段线体的运输方向和运输速度,根据电机的类型,确定电机的速度控制方式,所述传输速度可以采用档位的方式进行调节,例如低档、中档、高档,一档、二档、三挡的形式,也可以采用数值的方式调节,例如1m/s、2m/s、3m/s等多种方式;需要设定多段线体的初始速度相同。
89.线体监控模块,用于监控各段线体上电机运行的实时速度和扭矩,当线体出现异常时报警,监控电机运行的速度与设定的速度是否相同,监控电机在运行的过程中是否存在过载、过电流或运行超时的情况。
90.异常处理模块,用于接收系统下发的各类报警,并对报警进行处理,例如出现过载和过电流的情况,说明电池包有可能在两段中间位置时存在打滑,需在报警发生时复位电机报警,监控两段线体的速度是否一致,并及时调整两段线体速度;例如出现超时报警的情况,在规定的时间内没有完成传输,可能检测传感器感应异常或电池包出现卡顿,需加大扭矩或更换感应器处理。
91.本所述的电池包传输控制系统为了能够实现上述控制方法,设置信号采集模块,用于采集输送线上物料的位置;设置线体控制模块,用于控制各段线体上电机的运行状态,并通过速度以及扭矩对其进行调节;设置线体监控模块,用于监控各段线体上电机运行的实时速度和扭矩,当线体出现异常时报警;设置异常处理模块,用于接收系统下发的各类报警,并对报警进行处理;该系统构造简单实用,在成本上有很大的优势,有利于在换电站内的大面积推广。
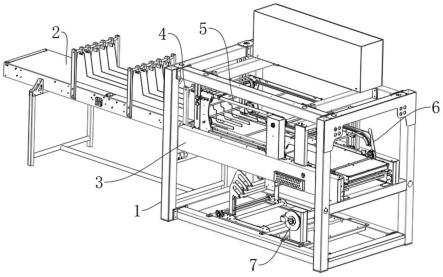
92.参照图3所示,所述信号采集模块包括设置在输送线上的到位检测传感器11、减速传感器12、在位检测传感器13和越位检测传感器14;
93.其中,所述到位检测传感器11用于检测物料是否输送到位,所述到位检测传感器11设置在第一段线体的前端和最后一段线体的末端,当到位检测传感器11检测到物料时,说明物料已经从上一道工序转移到该输送线上,输送线可以开始运行或停止运行;
94.所述减速传感器12用于控制线体的运输速度,所述减速传感器12设置在相邻两段线体的拼接处,用于检测是否有物料卡在线体的交接处,当有物料卡在线体交接处时,说明两段线体的速度不匹配,从而对两段线体的速度进行重新调节;
95.所述在位检测传感器13设置在中间段线体的中间位置,用于检测物料是否到达该段线体,实时监测物料在输送线上的位置;
96.所述越位检测传感器14,用于检测物料停止时是否位置准确,所述越位检测传感器14设置在到位检测传感器11的两侧,即位于第一段线体的最前端和最后一段线体的最末端,正常情况下,当到位检测传感器11检测到物料后,输送线就会停止运行,但是,当到位检测传感器11或者输送线出现异常的时候,物料就会沿原本的传输方向继续运输,此时当越位检测传感器14检测到物料时,说明物料已经运输过位了,需立即停止输送线。
97.实施例7
98.本发明还提供了一种电池包输送线,用于完成换电站内电池包的运输,所述电池包输送线配制有上述实施例6的控制系统,能够完成上述实施例1~5的控制方法。
99.显然,上述实施例仅仅是为清楚地说明所作的举例,并非对实施方式的限定。对于所属领域的普通技术人员来说,在上述说明的基础上还可以做出其它不同形式变化或变
动。这里无需也无法对所有的实施方式予以穷举。而由此所引伸出的显而易见的变化或变动仍处于本发明创造的保护范围之中。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。