1.本公开涉及汽车技术领域,特别涉及一种悬置的强度检查方法、系统、设备和存储介质。
背景技术:
2.汽车的悬置是汽车的动力总成的重要组成部分,用于承担动力总成载荷,降低传递到车身振动。悬置支架本体强度必须满足各种悬置工况下的强度要求。
3.相关技术中,相关技术人员在悬置分析软件中,采用多种悬置工况对悬置的强度进行强度检查。其中,悬置分析软件中包括悬置模型,悬置模型包括多个子悬置模型。相关技术人员在悬置分析软件中逐个填写每个子悬置模型在不同悬置工况下的载荷。
4.由于悬置工况数量较多,每个悬置工况对应多个载荷,所以填写次数较多,导致悬置强度检查效率低。
技术实现要素:
5.本公开实施例提供了一种悬置的强度检查方法、系统、设备和存储介质,能够提高悬置的强度检查效率,所述技术方案如下:
6.第一方面,提供了一种悬置的强度检查方法,所述方法包括:获得工况指示信息,所述工况指示信息用于指示目标悬置工况;根据悬置工况与载荷之间的对应关系,确定所述目标悬置工况对应的目标载荷,所述对应关系中,每个所述悬置工况均包括第一方向、第二方向和第三方向上的载荷,所述第一方向、所述第二方向和所述第三方向两两垂直;向悬置模型的多个子悬置模型加载所述目标载荷,以得到检查结果,所述检查结果用于指示所述目标悬置工况下,所述悬置模型的强度的合格性;输出所述检查结果。
7.可选地,所述获得工况指示信息,包括以下任一种:接收输入的所述目标悬置工况的标识;根据基于悬置工况列表输入的选择指令,得到所述工况指示信息;接收输入的子悬置模型的标识,基于预设的子悬置模型与悬置工况之间的对应关系和所述子悬置模型的标识,得到所述工况指示信息。
8.可选地,所述向悬置模型的多个子悬置模型加载所述目标载荷,包括:确定所述子悬置模型的弹性中心点坐标;在所述弹性中心点坐标对应的位置,依次加载所述目标悬置工况对应的在所述第一方向、所述第二方向和所述第三方向上的载荷。
9.可选地,每个所述子悬置模型均包括多个组件,所述输出所述检查结果,包括:接收悬置指示信息,所述悬置指示信息用于指示目标子悬置模型和/或目标组件,所述目标子悬置模型为所述多个子悬置模型中的至少一个,所述目标组件为所述目标子悬置模型的多个组件中的至少一个;基于所述悬置指示信息,输出所述检查结果。
10.可选地,所述悬置指示信息包括所述目标子悬置模型的标识和所述目标组件的标识,或者,所述悬置指示信息包括所述目标组件的标识;所述基于所述悬置指示信息,输出所述检查结果,包括:输出所述目标组件在所述目标悬置工况下的检查结果;或者,所述悬
置指示信息包括所述目标子悬置模型的标识;所述基于所述悬置指示信息,输出所述检查结果,包括:输出所述目标子悬置模型的多个组件在所述目标悬置工况下的检查结果。
11.第二方面,提供了一种悬置的强度检查装置,所述装置包括:获取模块,用于获得工况指示信息,所述工况指示信息用于指示目标悬置工况;确定模块,用于根据悬置工况与载荷之间的对应关系,确定所述目标悬置工况对应的目标载荷,所述对应关系中,每个所述悬置工况均包括第一方向、第二方向和第三方向上的载荷,所述第一方向、所述第二方向和所述第三方向两两垂直;载荷加载模块,用于向悬置模型的多个子悬置模型加载所述目标载荷,以得到检查结果,所述检查结果用于指示所述目标悬置工况下,所述悬置模型的强度的合格性;输出模块,用于输出所述检查结果。
12.可选地,所述获取模块,用于采用以下方式中的任一种获得所述工况指示信息:接收输入的所述目标悬置工况的标识;根据基于悬置工况列表输入的选择指令,得到所述工况指示信息;接收输入的子悬置模型的标识,基于预设的子悬置模型与悬置工况之间的对应关系和所述子悬置模型的标识,得到所述工况指示信息。
13.可选地,所述载荷加载模块用于,确定所述子悬置模型的弹性中心点坐标;在所述弹性中心点坐标对应的位置,依次加载所述目标悬置工况对应的在所述第一方向、所述第二方向和所述第三方向上的载荷。
14.可选地,每个所述子悬置模型均包括多个组件,所述输出模块用于,接收悬置指示信息,所述悬置指示信息用于指示目标子悬置模型和/或目标组件,所述目标子悬置模型为所述多个子悬置模型中的至少一个,所述目标组件为所述目标子悬置模型的多个组件中的至少一个;基于所述悬置指示信息,输出所述检查结果。
15.可选地,所述悬置指示信息包括所述目标子悬置模型的标识和所述目标组件的标识,或者,所述悬置指示信息包括所述目标组件的标识;所述输出模块用于,输出所述目标组件在所述目标悬置工况下的检查结果;或者,所述悬置指示信息包括所述目标子悬置模型的标识;所述输出模块用于,输出所述目标子悬置模型的多个组件在所述目标悬置工况下的检查结果。
16.第三方面,提供了一种计算机设备,包括:处理器;用于存储处理器可执行指令的存储器;其中,所述处理器被配置为执行第一方面所述的方法。
17.第四方面,提供了一种计算机可读存储介质,当计算机可读存储介质中的指令由计算机设备的处理器执行时,使得计算机设备能够执行第一方面所述的方法。
18.第五方面,提供了一种计算机程序产品,包括计算机程序/指令,所述计算机程序/指令被处理器执行时实现第一方面所述的方法。
19.本公开实施例提供的技术方案带来的有益效果是:
20.本公开实施例中,先获得工况指示信息,工况指示信息用于指示目标悬置工况;然后根据悬置工况与载荷之间的对应关系,确定目标悬置工况对应的目标载荷;最后,向悬置模型的多个子悬置模型加载目标载荷,得到检查结果,检查结果用于指示目标悬置工况下,悬置模型的强度的合格性。该过程仅需要输入工况指示信息,就可以根据悬置工况与载荷之间的对应关系以及工况指示信息确定出的目标悬置工况,确定出目标载荷,进而完成悬置的强度检查。该过程不需要人工输入每个子悬置模型在目标悬置工况下的多个载荷,从而提高了悬置的强度检查效率。
附图说明
21.为了更清楚地说明本公开实施例中的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本公开的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
22.图1是本公开实施例提供的一种悬置的强度检查方法的示意图;
23.图2是本公开实施例提供的另一种悬置的强度检查方法的示意图;
24.图3是本公开实施例提供的一种悬置的强度检查装置的结构框图;
25.图4是本公开实施例提供的一种计算机设备的结构框图。
具体实施方式
26.为使本公开的目的、技术方案和优点更加清楚,下面将结合附图对本公开实施方式作进一步地详细描述。
27.悬置系统主要包括起连接作用的悬置支架和减振的悬置软垫。其中,悬置支架用于连接车身和动力总成。悬置软垫用于衰减动力总成到车身的振动,以及衰减车身到动力总成的振动。动力总成包括变速箱和发动机。
28.悬置系统按照布置方式可分为三点式悬置和四点式悬置等。其中,三点式悬置包括左悬置、右悬置和后悬置,四点式悬置包括左悬置、右悬置、前悬置和后悬置。示例性地,前悬置布置在副车架横梁上,后悬置布置在副车架上或者车身加强板上,左悬置布置在左纵梁上,右悬置布置在右纵梁上。
29.通常情况下,采用28个悬置工况来检查悬置的强度是否合格。28个悬置工况包括典型悬置工况和极限悬置工况。
30.其中,典型悬置工况包括:静态设计位置(动力总成自重下);发动机最大前进扭矩;发动机最大后退扭矩;发动机最大前进扭矩和前驱前进加速度、发动机最大前进扭矩和后驱前进加速度、发动机最大前进扭矩和四轮驱动前进加速度;发动机最大前进扭矩和左传;发动机最大前进扭矩和右传;发动机最大前进扭矩和垂直向下冲击;发动机最大前进扭矩和垂直回弹;发动机最大后退扭矩和前驱后退加速度、发动机最大后退扭矩和后驱后退加速度、发动机最大后退扭矩和四轮驱动后退加速度;坏路向上;坏路向下、前进纵向加载(全油门加速);后退纵向加载(全油门加速);1倍重力加速度载荷;部分前进扭矩(5/8全油门);部分倒挡扭矩。
31.极限悬置工况包括:8kph前碰;8kph后碰;垂直向上加载(深坑);垂直向下加载(深坑);横向向左加载;横向向右加载;垂直向上和横向向左加载;垂直向上和横向向右加载;垂直向下和横向向左加载;垂直向下和横向向右加载;全油门n到d档(离合器抵挡全油门结合);全油门n到r档(离合器倒挡全油门结合)。
32.28个悬置工况中,每个悬置工况均对应一个三方向载荷(fx、fy、fz)。fx为第一方向上的载荷、fy为第二方向上的载荷、fz为第三方向上的载荷。第一方向、第二方向和第三方向两两垂直。
33.当采用28个悬置工况检查悬置的强度时,由于每个悬置工况均对应三方向上的载荷,并且在检查悬置强度时,需要对车身侧悬置(悬置连接车辆底盘的一侧)和动总侧悬置
(悬置连接发动机或变速箱的一侧)分别进行强度检查,工程师在悬置分析软件中检查悬置的强度时,需要对每个悬置工况下的三方向载荷逐个方向施加。以三点式悬置为例,工程师要完成一轮28个悬置工况的分析,需要手动设置悬置工况设置504次。
34.为此,本公开实施例提供一种悬置的强度检查方法,减少人为操作的工作量,避免由于加载过程中人为疏忽所带来的的可能的加载错误,便于工程师能把更多精力投入到后处理的结果解读和悬置结构的优化改进中去。
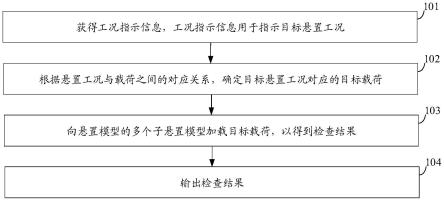
35.图1是本公开实施例提供的一种悬置的强度检查方法的流程图,该方法可以由计算机设备执行。参见图1,该方法包括:
36.在步骤101中,获得工况指示信息,工况指示信息用于指示目标悬置工况。
37.目标悬置工况为悬置待检查的悬置工况。
38.示例性地,目标悬置工况为前述的28个悬置工况中的至少一个。也即是,目标悬置工况可以为28个悬置工况中的一个或多个。目标悬置工况的具体选取由相关技术人员根据实际检查需要进行确定。例如,目标悬置工况为28个悬置工况。
39.在步骤102中,根据悬置工况与载荷之间的对应关系,确定目标悬置工况对应的目标载荷。
40.对应关系中,每个悬置工况均包括第一方向、第二方向和第三方向上的载荷。第一方向、第二方向和第三方向两两垂直。不同的悬置工况对应不同的载荷。
41.在一些示例中,计算机设备中存储有悬置工况与载荷之间的对应关系。计算机设备可以根据目标悬置工况以及悬置工况与载荷之间的对应关系,确定目标悬置工况对应的载荷。
42.在步骤103中,向悬置模型的多个子悬置模型加载目标载荷,以得到检查结果。
43.示例性地,悬置模型为前述的三点式悬置模型或者四点式悬置模型。
44.检查结果用于指示目标悬置工况下,悬置模型的强度的合格性。
45.示例性地,计算机设备可以自动将目标悬置工况对应的载荷加载至悬置模型的多个子悬置模型上,并且得到目标悬置工况下悬置模型的检查结果。
46.在步骤104中,输出检查结果。
47.在一些示例中,计算机设备将检查结果输出至显示设备,以通过显示设备展示检查结果。在另一些示例中,计算机设备将检查结果输出至存储设备,以通过存储设备保存该检查结果。
48.本公开实施例中,先获得工况指示信息,工况指示信息用于指示目标悬置工况;然后根据悬置工况与载荷之间的对应关系,确定目标悬置工况对应的目标载荷;最后,向悬置模型的多个子悬置模型加载目标载荷,得到检查结果,检查结果用于指示目标悬置工况下,悬置模型的强度的合格性。该过程仅需要输入工况指示信息,就可以根据悬置工况与载荷之间的对应关系以及工况指示信息确定出的目标悬置工况,确定出目标载荷,进而完成悬置的强度检查。该过程不需要人工输入每个子悬置模型在目标悬置工况下的多个载荷,从而提高了悬置的强度检查效率。
49.图2是本公开实施例提供的一种悬置的强度检查方法的流程图,该方法可以由计算机设备执行。参见图2,该方法包括:
50.在步骤201中,获得悬置模型,悬置模型中包括多个子悬置模型。
51.悬置模型可以为前述的三点式悬置模型或者四点式悬置模型。
52.其中,三点式悬置模型对应的多个子悬置模型包括左悬置子模型、右悬置子模型和后悬置子模型。四点式悬置模型对应的多个子悬置模型包括前悬置子模型、后悬置子模型、左悬置子模型和右悬置子模型。
53.每个子悬置模型包括对应的多个组件。示例性地,左悬置子模型对应的多个组件包括第一车身侧支架、动总侧托臂和第一动总侧支架。右悬置子模型对应的多个组件包括第一车身侧支架、第二车身侧支架和动总侧托臂。后悬置子模型(左侧)对应的多个组件包括第二动总侧支架和第一副车架侧支架。后悬置子模型(右侧)对应的多个组件包括第三动总侧支架、第四动总侧支架和2个第二副车架侧支架。
54.在一些实施方式中,悬置模型是计算机设备自动生成的。步骤201包括以下步骤:
55.第一步,获取悬置模型的多个子悬置模型的模型参数和约束节点参数。
56.在一些示例中,子悬置模型的模型参数为子悬置模型的多个组件的型号,或者为子悬置模型的多个组件的结构尺寸参数。
57.在一些示例中,子悬置模型的约束节点参数为子悬置模型的悬置螺栓孔个数和悬置螺栓孔位置。这里,悬置螺栓孔指的是子悬置模型与车身侧、动总侧或者变速箱之间连接的螺栓孔,不包括各子悬置模型之间的螺栓孔。例如,左悬置子模型包括与变速箱连接的三个悬置螺栓孔,以及与车身侧连接的三个悬置螺栓孔。
58.示例性地,计算机设备中存储有悬置模型对应的多个子悬置模型的模型参数和约束节点参数。计算机设备可以从存储设备中获取存储的悬置模型对应的多个子悬置模型的模型参数和约束节点参数。
59.第二步,根据多个子悬置模型的模型参数,生成多个子悬置模型。
60.示例性地,计算机设备可以根据每个子悬置模型的模型参数,自动生成对应的子悬置模型。
61.第三步,根据多个子悬置模型以及多个子悬置模型的约束节点参数,生成悬置模型。
62.示例性地,计算机设备可以根据生成的子悬置模型以及获取的该子悬置模型的约束节点参数,将子悬置模型固定在车身侧和动总侧之间,从而得到悬置模型。
63.可选地,第一步和第二步也可以被替换为:获取悬置模型对应的多个子悬置模型和多个子悬置模型对应的约束节点参数。
64.在该示例中,计算机设备中存储有悬置模型对应的多个子悬置模型,可以直接从存储设备中获取悬置模型对应的多个子悬置模型。
65.在另一些实施方式中,计算机设备的存储单元中存储有悬置模型。计算机设备可直接从存储单元中获取悬置模型。
66.在步骤202中,获得工况指示信息,工况指示信息用于指示目标悬置工况。
67.目标悬置工况的相关内容,参见前述步骤101,在此省略详细描述。
68.本公开实施例中,可以采用以下方式中的任一种来获得工况指示信息:
69.方式一,接收输入的目标悬置工况的标识。工况指示信息为目标悬置工况的标识。
70.在一些示例中,计算机设备中存储有28个悬置工况的标识。每一个悬置工况的标识对应28个悬置工况中的一个悬置工况,不同的悬置工况的标识对应不同的悬置工况。悬
置工况的标识可以是数字或者字符等。示例性地,数字1到28分别对应28个悬置工况。
71.相关技术人员可以在计算机设备中输入目标悬置工况的标识。计算机设备根据相关技术人员输入的目标悬置工况的标识,确定目标悬置工况。
72.方式二,根据基于悬置工况列表输入的选择指令,得到工况指示信息。
73.在一些示例中,悬置工况列表包括前述的28个悬置工况,以及每个悬置工况对应的选择框。
74.计算机设备的显示界面中显示有悬置工况列表。选择指令由相关技术人员点击悬置工况列表中的至少一个选择框触发。选择指令中包括工况指示信息。计算机设备获取到选择指令后,可以确定出对应的目标悬置工况。
75.方式三,接收输入的子悬置模型的标识,基于预设的子悬置模型与悬置工况之间的对应关系和子悬置模型的标识,将子悬置模型的标识对应的悬置工况作为目标悬置工况。
76.悬置模型的多个子悬置模型中,每个子悬置模型要加载的悬置工况可能不相同。在一些示例中,计算机设备中存储有子悬置模型需要加载的悬置工况。计算机设备可以根据相关技术人员输入的子悬置模型的标识,确定出对应的子悬置模型,以及子悬置模型对应的目标悬置工况。
77.在步骤203中,根据悬置工况与载荷之间的对应关系,确定目标悬置工况对应的目标载荷。
78.对应关系以及确定目标悬置工况对应的目标载荷的相关内容,参见前述步骤102,在此省略详细描述。
79.在步骤204中,确定子悬置模型的弹性中心点坐标。
80.弹性中心点指的是该子悬置车身侧和动总侧通过衬套连接的中心位置。
81.示例性地,计算机设备中存储有每个子悬置模型的弹性中心点坐标。计算机设备可以从存储单元中获取每个子悬置模型的弹性中心点坐标。
82.在步骤205中,在子悬置模型的弹性中心点坐标对应的位置,加载目标载荷。
83.在一些实施方式中,步骤205包括:在子悬置模型的弹性中心点坐标对应的位置,依次加载目标悬置工况对应的在第一方向、第二方向和第三方向上的载荷。
84.需要说明的是,本公开实施例中,计算机设备在向悬置模型的多个子悬置模型加载目标载荷时,一次只能加载一个悬置工况在一个方向上的载荷。例如,发动机最大前进扭矩工况下对应的第一方向、第二方向和第三方向上的载荷为(fx1,fy1,fz1),计算机设备一次只能加载该悬置工况下在第一方向的载荷fx1,或者加载该悬置工况下在第二方向上的载荷fy1,或者加载该悬置工况下在第三方向上的载荷fz1。
85.在步骤206中,输出检查结果。
86.检查结果用于指示目标悬置工况下,悬置模型的强度的合格性。示例性地,检查结果的形式为表格。
87.在一些示例中,检查结果中仅包括目标子悬置模型的多个组件在目标悬置工况下的应力。
88.在另一些示例中,检查结果中仅包括目标子悬置模型的多个组件在目标悬置工况下的合格性。
89.在又一些示例中,检查结果包括目标子悬置模型的多个组件在目标悬置工况下的应力,以及各组件的合格性。
90.示例性地,计算机设备中存储有各子悬置模型对应的各组件的应力阈值。计算机设备在向子悬置模型加载目标悬置工况对应的载荷后,会自动计算出该子悬置模型的多个组件在目标悬置工况下的应力。当应力超出组件对应的应力阈值后,判断该组件的强度不合格;当应力未超出组件对应的应力阈值,判断该组件的强度合格。
91.在一些实施方式中,步骤206包括:接收悬置指示信息;基于悬置指示信息,输出检查结果。
92.悬置指示信息用于指示目标子悬置模型和/或目标组件。例如,悬置指示信息用于指示目标子悬置模型;或者,悬置指示信息用于指示目标组件;或者,悬置指示信息用于指示目标子悬置模型和目标组件。
93.其中,目标子悬置模型为悬置模型的多个子悬置模型中的至少一个。目标组件为目标子悬置模型的多个组件中的至少一个。子悬置模型的组件的相关内容,参见前述步骤201,在此省略详细描述。
94.在一些实施方式中,悬置指示信息包括目标子悬置模型的标识和目标组件的标识。基于悬置指示信息,输出检查结果,包括:输出目标组件在目标悬置工况下的检查结果。
95.在该实施方式中,同一子悬置模型中各组件的标识不同,不同子悬置模型对应的各组件的标识可能相同或不同。因此,需要根据目标子悬置模型的标识以及目标组件的标识,才能确定出目标组件。示例性地,子悬置模型的标识为字母,例如,a、b、c等;组件的标识为数字,例如,1、2、3等。
96.示例性地,目标子悬置模型的标识和目标组件的标识由相关技术人员输入至计算机设备中。计算机设备获取到相关技术人员输入的目标子悬置的标识和目标组件的标识后,输出该目标组件在目标悬置工况下对应的检查结果。
97.在该实施方式中,相关技术人员可直接根据子悬置的模型的标识和子悬置模型对应的组件的标识,获取目标组件在目标悬置工况下的检查结果,节省了相关技术人员的检查结果处理时间。
98.在另一些实施方式中,悬置指示信息包括目标组件的标识。基于悬置指示信息,输出检查结果,包括:输出目标组件在目标悬置工况下的检查结果。
99.在该实施方式中,不同子悬置模型对应的各组件的标识均不同。因此,仅根据目标组件的标识,就可以确定出唯一的目标组件。
100.示例性地,目标组件的标识由相关技术人员输入至计算机设备中。计算机设备获取到相关技术人员输入的目标组件的标识后,输出该目标组件在目标悬置工况下对应的检查结果。
101.在该实施方式中,相关技术人员可直接根据子悬置模型对应的组件的标识,获取组件在目标悬置工况下的检查结果,节省了相关技术人员的检查结果处理时间。
102.在又一些实施方式中,悬置指示信息包括目标子悬置模型的标识。基于悬置指示信息,输出检查结果,包括:输出目标子悬置模型的多个组件在目标悬置工况下的检查结果。
103.示例性地,目标子悬置模型的标识由相关技术人员输入至计算机设备中。计算机
设备获取到相关技术人员输入的目标子悬置模型的标识后,输出该目标子悬置模型的多个组件在目标悬置工况下的检查结果。
104.在该实施方式中,相关技术人员可直接根据子悬置模型的标识,获取该子悬置模型的多个组件在目标悬置工况下的检查结果,节省了相关技术人员的检查结果处理时间。
105.可选地,本公开实施例中,计算机设备中安装有用于向悬置模型加载目标载荷(步骤201至步骤205)的第一软件、用于计算目标载荷对应的子悬置模型的多个组件的应力结果的第二软件以及用于对应力结果进行处理,输出检查结果的第三软件。第一软件、第二软件和第三软件可以是同一个软件或者不同的软件。示例性地,第一软件为hyperworks(有限元建模/仿真套件)中的hypermesh(前处理),第二软件为abaqus(有限元分析软件),第三软件为hyperworks中的hyperview(后处理)。
106.本公开实施例中,在对悬置的强度进行检查过程中,仅需要输入工况指示信息,就可以根据悬置工况与载荷之间的对应关系以及工况指示信息确定出的目标悬置工况,确定出目标载荷,进而完成悬置的强度检查。一方面,该过程不需要人工输入每个子悬置模型在目标悬置工况下的多个载荷,提高了悬置的强度检查效率。另一方面,可以减少人为输入载荷错误、遗漏等,提高悬置的强度检查的准确性。
107.图3是本公开实施例提供的一种悬置的强度检查装置300的结构框图。如图3所示,该装置包括:获取模块301、确定模块302、载荷加载模块303和输出模块304。
108.获取模块301,用于获得工况指示信息,所述工况指示信息用于指示目标悬置工况。确定模块302,用于根据悬置工况与载荷之间的对应关系,确定所述目标悬置工况对应的目标载荷,所述对应关系中,每个所述悬置工况均包括第一方向、第二方向和第三方向上的载荷,所述第一方向、所述第二方向和所述第三方向两两垂直。载荷加载模块303,用于向悬置模型的多个子悬置模型加载所述目标载荷,以得到检查结果,所述检查结果用于指示所述目标悬置工况下,所述悬置模型的强度的合格性。输出模块304,用于输出所述检查结果。
109.可选地,所述获取模块301,用于采用以下方式中的任一种获得所述工况指示信息:接收输入的所述目标悬置工况的标识;根据基于悬置工况列表输入的选择指令,得到所述工况指示信息;接收输入的子悬置模型的标识,基于预设的子悬置模型与悬置工况之间的对应关系和所述子悬置模型的标识,得到所述工况指示信息。
110.可选地,所述载荷加载模块303用于,确定所述子悬置模型的弹性中心点坐标;在所述弹性中心点坐标对应的位置,依次加载所述目标悬置工况对应的在所述第一方向、所述第二方向和所述第三方向上的载荷。
111.可选地,每个所述子悬置模型均包括多个组件,所述输出模块304用于,接收悬置指示信息,所述悬置指示信息用于指示目标子悬置模型和/或目标组件,所述目标子悬置模型为所述多个子悬置模型中的至少一个,所述目标组件为所述目标子悬置模型的多个组件中的至少一个;基于所述悬置指示信息,输出所述检查结果。
112.可选地,所述悬置指示信息包括所述目标子悬置模型的标识和所述目标组件的标识,或者,所述悬置指示信息包括所述目标组件的标识;所述输出模块304用于,输出所述目标组件在所述目标悬置工况下的检查结果;或者,所述悬置指示信息包括所述目标子悬置模型的标识;所述输出模块304用于,输出所述目标子悬置模型的多个组件在所述目标悬置
工况下的检查结果。
113.需要说明的是:上述实施例提供的悬置的强度检查装置在对悬置的强度进行检查时,仅以上述各功能模块的划分进行举例说明,实际应用中,可以根据需要而将上述功能分配由不同的功能模块完成,即将设备的内部结构划分成不同的功能模块,以完成以上描述的全部或者部分功能。另外,上述实施例提供的悬置的强度检查装置与悬置的强度检查方法实施例属于同一构思,其具体实现过程详见方法实施例,这里不再赘述。
114.图4是本公开实施例提供的计算机设备的结构框图。该计算机设备400包括:处理器401和存储器402。
115.处理器401可以包括一个或多个处理核心,比如4核心处理器、8核心处理器等。处理器401可以采用dsp(digital signal processing,数字信号处理)、fpga(field-programmable gate array,现场可编程门阵列)、pla(programmable logic array,可编程逻辑阵列)中的至少一种硬件形式来实现。处理器401也可以包括主处理器和协处理器,主处理器是用于对在唤醒状态下的数据进行处理的处理器,也称cpu(central processing unit,中央处理器);协处理器是用于对在待机状态下的数据进行处理的低功耗处理器。在一些实施例中,处理器401可以在集成有gpu(graphics processing unit,图像处理器),gpu用于负责显示屏所需要显示的内容的渲染和绘制。一些实施例中,处理器401还可以包括ai(artificial intelligence,人工智能)处理器,该ai处理器用于处理有关机器学习的计算操作。
116.存储器402可以包括一个或多个计算机可读存储介质,该计算机可读存储介质可以是非暂态的。存储器402还可包括高速随机存取存储器,以及非易失性存储器,比如一个或多个磁盘存储设备、闪存存储设备。在一些实施例中,存储器402中的非暂态的计算机可读存储介质用于存储至少一个指令,该至少一个指令用于被处理器401所执行以实现本公开实施例中提供的悬置的强度检查方法。
117.本领域技术人员可以理解,图4中示出的结构并不构成对计算机设备400的限定,可以包括比图示更多或更少的组件,或者组合某些组件,或者采用不同的组件布置。
118.本发明实施例还提供了一种非临时性计算机可读存储介质,当所述存储介质中的指令由计算机设备400的处理器执行时,使得计算机设备400能够执行本公开实施例中提供的悬置的强度检查方法。
119.本公开实施例还提供了一种计算机程序产品,包括计算机程序/指令,所述计算机程序/指令被处理器执行时实现本公开实施例中提供的悬置的强度检查方法。
120.以上所述仅为本公开的可选实施例,并不用以限制本公开,凡在本公开的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本公开的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。