1.本技术实施方式涉及卫星导航跟踪技术领域,尤其涉及信号跟踪方法和信号跟踪装置。
背景技术:
2.随着人们对定位精度的要求越来越高,全球导航卫星系统(global navigation satellite system,简称gnss)不断更新换代。由于相比于二进制相移键控(binary phase shift keying,简称bpsk)信号,副载波调制的信号具备频域分离特性、更宽的均方根带宽以及更高的测距精度,因此目前gnss信号通常采用副载波调制的信号例如altboc信号或ace-boc宽带复合信号。
3.altboc信号和ace-boc宽带复合信号均为双频恒包络复合信号,大多数情况下两者均有四个信号分量,其中两个信号分量位于下边带,另外两个信号分量位于上边带。altboc信号的四个信号分量的功率相等,而ace-boc宽带复合信号的四个信号分量的功率是可以被调配的,也就是说,ace-boc宽带复合信号的四个信号分量的功率可以不相等。与altboc信号相比,ace-boc宽带复合信号的信号分量的功率分配具有更高的灵活性,可以满足gnss的不同设计和应用需求。
4.虽然一般情况下ace-boc宽带复合信号具有四个信号分量,但是在特殊情况下例如为了满足特定应用需求某一个信号分量的功率可能被调制为零时,ace-boc宽带复合信号的信号分量的数量小于4。不过,无论ace-boc宽带复合信号是否具有四个信号分量,其各个信号分量的载波相位和副载波相位是严重耦合的。
5.针对gnss信号采用的跟踪技术一般为dbt技术或asym-dbt技术中。其中,dbt技术仅适用于信号分量功率相等的gnss信号例如altboc信号,无法解决载波相位和副载波相位耦合的问题。虽然,asym-dbt技术可以适用于信号分量功率不相等的gnss信号,但是asym-dbt技术针对的是信号分量的幅度域,也就是说,asym-dbt技术是通过对各个信号分量功率也即幅度进行估计和归一化来实现信号跟踪,也就是说,asym-dbt技术先将非等功率的信号分量等效转换为等功率的信号分量后再采用dbt技术,而信号分量功率的估计会受到很多因素干扰、准确性非常低,进而导致归一化后的信号功率仍然不相等,致使后续无法采用的dbt技术。由上可知,现有的跟踪技术无法解决载波相位和副载波相位耦合的问题,不适用于ace-boc宽带复合信号。
技术实现要素:
6.根据本技术第一方面提供的信号跟踪方法,包括:
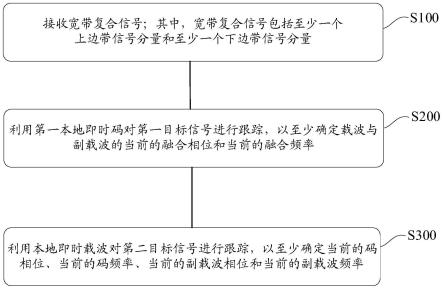
7.接收宽带复合信号;其中,所述宽带复合信号包括至少一个上边带信号分量和至少一个下边带信号分量;
8.利用第一本地即时码对第一目标信号进行跟踪,以至少确定载波与副载波的当前的融合相位和当前的融合频率;以及
9.利用本地即时载波对第二目标信号进行跟踪,以至少确定当前的码相位、当前的码频率、当前的副载波相位和当前的副载波频率;
10.其中,所述第一目标信号和所述第二目标信号中的其中一个为所述上边带信号分量,另外一个为所述下边带信号分量;所述第一本地即时码基于先前的所述码相位和先前的码频率确定,所述本地即时载波基于先前的所述融合相位和先前的所述融合频率确定。
11.根据本技术第二方面提供的信号跟踪装置,包括:
12.接收模块,接收宽带复合信号;其中,所述宽带复合信号包括至少一个上边带信号分量和至少一个下边带信号分量
13.载波环路,利用第一本地即时码对第一目标信号进行跟踪,以至少确定载波与副载波的当前的融合相位和当前的融合频率;以及
14.码环路和副载波环路,利用本地即时载波对第二目标信号进行跟踪,以至少确定当前的码相位、当前的码频率、当前的副载波相位和当前的副载波频率;
15.其中,所述第一目标信号和所述第二目标信号中的其中一个为所述上边带信号分量,另外一个为所述下边带信号分量;所述第一本地即时码基于先前的所述码相位和先前的码频率确定,所述本地即时载波基于先前的所述融合相位和先前的所述融合频率确定。
16.本技术实施例提供的信号跟踪方法和信号跟踪装置,分别跟踪两个不同的信号分量即上边带信号分量和下边带信号分量,将通过跟踪其中一个信号分量确定的载波与副载波的融合相位和融合频率共享给另外一个信号分量,由此在跟踪被共享融合相位和融合频率的信号分量时只需确定码相位、码频率、副载波相位和副载波频率,进而便可解决载波相位和副载波相位耦合的问题。可见,本技术利用相位交叉辅助的方式通过对上边带信号分量和下边信号分量进行联合处理跟踪,不仅解决了载波相位和副载波相位耦合的问题,能够适用于ace-boc宽带复合信号,而且本技术针对的是信号分量的相位域而并未对信号分量的功率进行估计,而asym-dbt技术针对信号分量的幅度域也即对信号分量的功率进行估计,相比于功率的估计,相位跟踪的准确率更高。
17.应当理解,本部分所描述的内容并非旨在标识本技术的实施例的关键或重要特征,也不用于限制本技术的范围。本技术的其它特征将通过以下的说明书而变得容易理解。
附图说明
18.通过阅读参照以下附图所作的对非限制性实施例所作的详细描述,本技术的其它特征、目的和优点将会变得更明显。附图用于更好地理解本方案,不构成对本技术的限定。在附图中:
19.图1是根据本技术的信号跟踪方法的流程图;
20.图2是根据本技术的信号跟踪方法的其中一种接收宽带复合信号的示意图;
21.图3是根据本技术的信号跟踪方法的另一种接收宽带复合信号的示意图;
22.图4是根据本技术的其中一种信号跟踪装置的局部示意图;
23.图5是根据本技术的另外一种信号跟踪装置的局部示意图;
24.图6是分别采用本技术的信号跟踪方法与采用现有bpsk-like技术跟踪ace-boc信号的载噪比随时间变化的示意图;
25.图7是采用本技术的信号跟踪方法跟踪ace-boc信号过程中两个下边带信号分量
的自相关函数曲线图;
26.图8是在不同环路滤波下分别采用本技术的信号跟踪方法与采用现有bpsk-like技术跟踪ace-boc信号的跟踪误差变化示意图;
27.图9是分别采用本技术的信号跟踪方法与采用现有bpsk-like技术跟踪ace-boc信号的码减载波随时间变化的示意图。
28.附图标记:
29.100、上边带信号分量的功率主瓣;
30.200、下边带信号分量的功率主瓣;300、单信号通道;
31.310、第一信号通道;320、第二信号通道;
32.400、载波数字控制振荡器;410、第一相关器;
33.421、第一乘积相关器;422、第一积分相关器;430、第一鉴相器;
34.500、副载波数字控制振荡器;510、第三相关器;
35.521、第二乘积相关器;522、第三乘积相关器;
36.530、第二积分相关器;540、第二鉴相器;
37.600、码数字控制振荡器;610、第三鉴相器。
具体实施方式
38.在本技术实施例的描述中,术语“第一”、“第二”、“第三”仅用于描述目的,而不能理解为指示或暗示相对重要性。
39.以下结合附图对本技术的示范性实施例做出说明,其中包括本技术实施例的各种细节以助于理解,应当将它们认为仅仅是示范性的。因此,本领域普通技术人员应当认识到,可以对这里描述的实施例做出各种改变和修改,而不会背离本技术的范围和精神。同样,为了清楚和简明,以下的描述中省略了对公知功能和结构的描述。
40.需要说明的是,在不冲突的情况下,本技术中的实施例及实施例中的特征可以相互组合。下面将参考附图并结合实施例来详细说明本技术。
41.相关技术中,gnss信号通常采用副载波调制的信号例如ace-boc宽带复合信号。一般情况下ace-boc宽带复合信号具有四个信号分量,四个信号分量中其中两个为上边带信号分量,另外两个为下边带信号分量。ace-boc宽带复合信号的四个信号分量的功率分配具有更高的灵活性,可以满足gnss的不同设计和应用需求。
42.ace-boc宽带复合信号可以表示为s(t):
[0043][0044]
其中,p
li
和p
lq
分别为两个下边带信号分量的功率,p
ui
和p
uq
分别为两个上边带信号分量的功率;s
li
(t)和s
lq
(t)分别为两个下边带信号分量的基带扩频信号,s
ui
(t)和s
uq
(t)分别为两个上边带信号分量的基带扩频信号;sc
l
(t)为下边带信号分量的副载波信号,scu(t)为上边带信号分量的副载波信号;ts=1/fs,fs为副载波频率;i
im
(t)为交调项,f0为载波频率。
[0045]
其中,公式(1.1)中的基带扩频信号用于维持对应信号分量的恒包络性质,上边带信号分量或下边带信号分量的基带扩频信号可以表示为:
[0046][0047]
其中,l∈{l,u},x∈{i,q};s
li
(t)和s
lq
(t)分别为两个下边带信号分量的基带扩频信号,s
ui
(t)和s
uq
(t)分别为两个上边带信号分量的基带扩频信号;d
li
(t)和d
lq
(t)分别为两个下边带信号分量携带的导航电文比特,d
ui
(t)和d
uq
(t)分别为两个上边带信号分量携带的导航电文比特;c
li
(t)和c
lq
(t)分别为两个下边带信号分量的扩频码信号,c
ui
(t)和c
uq
(t)分别为两个上边带信号分量的扩频码信号;(t)分别为两个上边带信号分量的扩频码信号;和分别为两个下边带信号分量采用的扩频码序列,和分别为两个上边带信号分量采用的扩频码序列;分别为两个上边带信号分量采用的扩频码序列;和分别为两个下边带信号分量的码率,和分别为两个上边带信号分量的码率;p(t)表示矩形脉冲,在区间t的取值为1,在其余区间t的取值为0。
[0048]
鉴于ace-boc宽带复合信号的功率主瓣很宽,而相关技术中接收模块的射频前端的带宽等于或略大于ace-boc宽带复合信号的功率主瓣,也就是说,接收模块的射频前端的带宽只能包含ace-boc宽带复合信号的功率主瓣,因此ace-boc宽带复合信号的副载波信号可以被简化为正弦信号,由此简化后的ace-boc宽带复合信号可以表示为r(t):
[0049][0050]
其中,p
li
和p
lq
分别为两个下边带信号分量的功率,p
ui
和p
uq
分别为两个上边带信号分量的功率;s
li
(t)和s
lq
(t)分别为两个下边带信号分量的基带扩频信号,s
ui
(t)和s
uq
(t)分别为两个上边带信号分量的基带扩频信号;τ为信号的传播延迟;fs为副载波频率;fd为多普勒频移;为初始载波相位。
[0051]
上述公式(1.3)经过整理可以表示为:
[0052]
r(t)=r
li
(t)-r
lq
(t) r
ui
(t)-r
uq
(t);
ꢀꢀꢀ
(1.4)
[0053]
其中,
[0054][0055][0056][0057][0058]
θ=2πfsτ;
[0059]
其中,r
li
(t)和r
lq
(t)分别为两个下边带信号分量,r
ui
(t)和r
uq
(t)分别为两个上边带信号分量;p
li
和p
lq
分别为两个下边带信号分量的功率,p
ui
和p
uq
分别为两个上边带信号分量的功率;s
li
(t)和s
lq
(t)分别为两个下边带信号分量的基带扩频信号,s
ui
(t)和s
uq
(t)分别
为两个上边带信号分量的基带扩频信号;τ为信号传播延迟;f0为载波频率;fd为多普勒频移;fs为副载波频率;φ为载波相位,θ为副载波相位。
[0060]
由此,根据公式(1.4)可知,ace-boc宽带复合信号的各个信号分量即上边带信号分量或下边带信号分量的载波相位和副载波相位被包含在同一个正弦函数或余弦函数中,也就是说,各个信号分量的载波相位和副载波相位是严重耦合的。而现有的跟踪技术例如dbt技术或asym-dbt技术无法解决载波相位和副载波相位耦合的问题,不适用于ace-boc宽带复合信号。
[0061]
此外,根据上述公式(1.4)还可知,下边带信号分量即r
li
(t)或r
lq
(t)的信号传播延迟τ、载波频率f0、多普勒频移fd和载波相位φ分别与上边带信号分量即r
ui
(t)或r
uq
(t)的信号传播延迟τ、载波频率f0、多普勒频移fd和载波相位φ取值相同,而下边带信号分量即r
li
(t)或r
lq
(t)的副载波频率fs和副载波相位θ分别与上边带信号分量即r
ui
(t)或r
uq
(t)的副载波频率fs和副载波相位θ取值相反。可见,下边带信号分量的载波相位φ和副载波相位θ与上边带信号分量的载波相位φ和副载波相位θ关联性很强。
[0062]
基于此,为了解决上述问题,如图1所示,本技术实施例提供了一种信号跟踪方法,该方法包括:
[0063]
s100、接收宽带复合信号;其中,宽带复合信号包括至少一个上边带信号分量和至少一个下边带信号分量;
[0064]
s200、利用第一本地即时码对第一目标信号进行跟踪,以至少确定载波与副载波的当前的融合相位和当前的融合频率;
[0065]
s300、利用本地即时载波对第二目标信号进行跟踪,以至少确定当前的码相位、当前的码频率、当前的副载波相位和当前的副载波频率;
[0066]
其中,第一目标信号和第二目标信号中的其中一个为上边带信号分量,另外一个为下边带信号分量;第一本地即时码基于先前的码相位和先前的码频率确定,本地即时载波基于先前的融合相位和先前的融合频率确定。
[0067]
本技术分别跟踪两个不同的信号分量即上边带信号分量和下边带信号分量,将通过跟踪其中一个信号分量确定的载波与副载波的融合相位和融合频率共享给另外一个信号分量,由此在跟踪被共享融合相位和融合频率的信号分量时只需确定码相位、码频率、副载波相位和副载波频率,进而便可解决载波相位和副载波相位耦合的问题。可见,本技术利用相位交叉辅助的方式通过对上边带信号分量和下边信号分量进行联合处理跟踪,不仅解决了载波相位和副载波相位耦合的问题,能够适用于ace-boc宽带复合信号,而且本技术针对的是信号分量的相位域而并未对信号分量的功率进行估计,而asym-dbt技术针对信号分量的幅度域也即对信号分量的功率进行估计,相比于功率的估计,相位跟踪的准确率更高。
[0068]
下面对本技术实施例中信号跟踪方法的各个步骤进行具体介绍。
[0069]
步骤s100
[0070]
宽带复合信号可以采用多种方式进行接收,例如:
[0071]
方式一、单通道宽带接收方式,如图2所示,步骤s100包括:
[0072]
s110、采用单信号通道300同时接收上边带信号分量和下边带信号分量;具体地,将接收模块的射频前端的中心频点放在上边带信号分量与下边带信号分量之间的中心频点处,接收模块的滤波器为低通滤波器,该低通滤波器的带宽也即单信号通道300的接收带
宽覆盖上边带信号分量的功率主瓣100与下边带信号分量的功率主瓣200。
[0073]
方式二、双通道窄带接收方式,如图3所示,步骤s100包括:
[0074]
s110、采用第一信号通道310接收上边带信号分量;
[0075]
s120、采用与第一信号通道310相互独立且并行设置的第二信号通道320接收下边带信号分量;
[0076]
具体地,如图3所示,将接收模块的射频前端的中心频点放在上边带信号分量与下边带信号分量之间的中心频点处,接收模块的第一滤波器为带通滤波器,第一滤波器的带宽也即第一信号通道310的接收带宽覆盖上边带信号分量的功率主瓣100,接收模块的第二滤波器也为带通滤波器,第二滤波器的带宽也即第二信号通道320的接收带宽覆盖下边带信号分量的功率主瓣200。
[0077]
由上可知,方式一中单信号通道300的接收带宽很宽,而方式二中第一信号通道310的接收带宽和第二信号通道320的接收带宽均较窄。在接收模块的射频前端的滤波资源足够的情况下,可采用方式一或方式二来接收宽带复合信号。但是,在接收模块的射频前端的滤波资源不足的情况下,例如在单信号通道300的接收带宽无法覆盖上边带信号分量的功率主瓣100与下边带信号分量的功率主瓣200的情况下,只能采用方式二来接收宽带复合信号。
[0078]
此外,需要说明的是,由于方式一仅采用了一个信号通道,上边带信号分量和下边带信号分量被同步接收,两者相位自然保持一直,而方式二采用第一信号通道310和第二信号通道320分别接收上边带信号分量和下边带信号分量,因此相比于方式一来说,为了保证方式二中上边带信号分量的相位与下边带信号分量的相位保持一致性,方式二中步骤s110和步骤s120需同步进行,也就是说,第一信号通道310接收上边带信号分量的时刻与第二信号通道320接收下边带信号分量的时刻相同。
[0079]
下面仍以ace-boc宽带复合信号为例,ace-boc宽带复合信号包括两个上边带信号分量即r
ui
(t)和r
uq
(t)以及两个下边带信号分量即r
li
(t)和r
lq
(t)。
[0080]
以方式一作为示例,接收模块同步接收的上边带信号分量和下边带信号分量分别为r
ui
(t)和r
li
(t),也即待跟踪的信号ri(t)为r
ui
(t) r
li
(t)。根据上文中公式(1.4)可知,(t)。根据上文中公式(1.4)可知,若以上边带信号分量r
ui
(t)的相位作为基准相位,则上边带信号分量r
ui
(t)可表示为(t)可表示为其中,φ
ui
(t)=2πf
ui
γ,f
ui
=f0 fd fs,γ=φ-θ。基于此,下边带信号分量r
li
(t)则可表示为为其中,θ
l
(t)=-2πf
s,l
t μ,f
s,l
=2fs,μ=2θ。可见,θ
l
(t)只与副载波相关而与载波无关,跟踪θ
l
(t)不会受到载波相位的影响。由此,
[0081]
当然,在接收模块同步接收的上边带信号分量和下边带信号分量分别为r
ui
(t)和r
li
(t)的情况下,也可以将下边带信号分量r
li
(t)的相位作为基准相位,也即下边带信号分量r
li
(t)可表示为(t)可表示为其中,φ
li
(t)=2π(f0 f
d-fs)t φ θ。那么,上边带信号分量r
ui
(t)则可表示为
[0082]
由此,采用方式一的情况下,待跟踪的信号有8种类型:
[0083]
第一种、以上边带信号分量r
ui
(t)的相位作为基准相位,待跟踪的信号ri(t)为r
ui
(t) r
li
(t);
[0084]
第二种、以下边带信号分量r
li
(t)的相位作为基准相位,待跟踪的信号ri(t)为r
ui
(t) r
li
(t);
[0085]
第三种、以上边带信号分量r
uq
(t)的相位作为基准相位,待跟踪的信号r
iq
(t)为r
uq
(t) r
li
(t);
[0086]
第四种、以下边带信号分量r
li
(t)的相位作为基准相位,待跟踪的信号r
iq
(t)为r
uq
(t) r
li
(t);
[0087]
第五种、以上边带信号分量r
ui
(t)的相位作为基准相位,待跟踪的信号ri(t)为r
ui
(t) r
lq
(t);
[0088]
第六种、以下边带信号分量r
lq
(t)的相位作为基准相位,待跟踪的信号ri(t)为r
ui
(t) r
lq
(t);
[0089]
第七种、以上边带信号分量r
uq
(t)的相位作为基准相位,待跟踪的信号ri(t)为r
uq
(t) r
lq
(t);
[0090]
第八种、以下边带信号分量r
lq
(t)的相位作为基准相位,待跟踪的信号ri(t)为r
uq
(t) r
lq
(t)。
[0091]
同理,采用方式二的情况下,待跟踪的信号也有8种类型。对于方式一与方式二来说待跟踪的信号一共有16种类型,可见相比于现有技术,本技术灵活性更高,能够满足不同的应用需求。
[0092]
步骤s200
[0093]
为了确定载波与副载波的当前的融合相位,步骤s200包括:
[0094]
s210、基于先前的融合相位和先前的融合频率对宽带复合信号进行载波剥离,以获得第一目标信号的基带信号;
[0095]
s220、根据第一目标信号的基带信号和第一本地即时码确定与第一目标信号对应的目标相关值;
[0096]
s230、根据目标相关值进行鉴相,以确定融合相位误差和当前的融合频率;
[0097]
s240、根据融合相位误差更新先前的融合相位,以获得当前的融合相位。
[0098]
结合图4和图5所示,下面以上文中提及的第一种待跟踪信号为例,也即,以待跟踪的信号ri(t)为r
ui
(t) r
li
(t),基准相位为上边带信号分量r
ui
(t)的相位φ
ui
(t)为例,对获取当前的融合相位的具体步骤进行说明:
[0099]
s210、基于先前的融合相位和先前的融合频率f
ui
对宽带复合信号进行载波剥离,也即对待跟踪的信号ri(t)进行载波剥离。具体地,利用载波数字控制振荡器400根据先前的融合相位和先前的融合频率f
ui
生成本地即时载波其中,f
ui
=f0 fd fs,f0为载波频率;fd为多普勒频移;fs为副载波频率。计算宽带复合信号与本地即时载波的乘积,也即计算ri(t)与的乘积以获得第一目标信号的基带信号s
ui
(t-τ)。
[0100]
s220、根据第一目标信号的基带信号s
ui
(t-τ)和第一本地即时码确定与第一目标信号对应的目标相关值。作为示例,目标相关值包括第一相关值i
ui,p
和第二相关值q
ui,p
。具体地,在第一积分区间[0,t]内对第一目标信号的基带信号s
ui
(t-τ)和第一本地即时码的乘积进行积分,以获取第一相关值i
ui,p
和第二相关值q
ui,p
:
[0101][0102]
其中,r∈{i,q},ri(t)为待跟踪的信号,为本地即时载波,为第一本地即时码,t为相干积分时间,为先前的码相位;
[0103]
由此通过计算公式(1.5)便可得到的第一相关值i
ui,p
和第二相关值q
ui,p
:
[0104][0105][0106]
其中,d
ui
为上边带信号分量r
ui
(t)携带的导航电文比特,p
ui
为上边带信号分量r
ui
(t)的功率,为基带信号s
ui
(t)的自相关函数,t为相干积分时间,为先前的码相位,sinc(δf
ui
t)=sin(πδf
ui
t)/(πδf
ui
t),δf
ui
为上边带信号分量r
ui
(t)的融合频率误差,δγ为上边带信号分量r
ui
(t)的相位误差。
[0107]
由于在实现稳定跟踪的情况下,δf
ui
≈0,因此上述公式(1.6)和公式(1.7)可被整理为:
[0108][0109][0110]
s230、根据目标相关值也即第一相关值i
ui,p
和第二相关值q
ui,p
进行鉴相,以确定融合相位误差δγ和当前的融合频率;具体地,基于公式(1.8)和公式(1.9),可采用如下公式计算融合相位误差δγ:
[0111][0112]
s240、根据融合相位误差δγ更新先前的融合相位以获得当前的融合相位。
[0113]
需要说明的是,在执行步骤s230时可采用本领域任意一种能够实现步骤s230的鉴相器来确定融合相位误差和当前的融合频率。例如该鉴相器可以但不限于是载波跟踪环路鉴相器。
[0114]
步骤s300
[0115]
为了确定当前的码相位和当前的副载波相位,步骤s300包括:
[0116]
s310、基于本地即时载波对宽带复合信号进行载波剥离,以获得第二目标信号的基带信号;
[0117]
s320、根据第二目标信号的基带信号、先前的码相位、先前的码频率、先前的副载波相位和先前的副载波频率确定与第二目标信号对应的提前相关值、即时相关值和延迟相关值
[0118]
s330、根据提前相关值和延迟相关值进行鉴相,以确定码相位误差和当前的码频
率;
[0119]
s340、根据码相位误差更新先前的码相位,以获得当前的码相位;
[0120]
s350、根据目标相关值和即时相关值进行鉴相,以确定副载波相位误差和当前的副载波频率;
[0121]
s360、根据副载波相位误差更新先前的副载波相位,以获得当前的副载波相位。
[0122]
下面仍第一种待跟踪信号为例,对获取当前的码相位和当前的副载波相位的具体步骤进行说明:
[0123]
s310、接收本地即时载波并基于本地即时载波对宽带复合信号进行载波剥离,具体地,计算宽带复合信号与本地即时载波的乘积,也即计算ri(t)与的乘积以获得第二目标信号的基带信号s
li
(t-τ)。
[0124]
s320、根据第二目标信号的基带信号s
li
(t-τ)、先前的码相位先前的码频率、先前的副载波相位和先前的副载波频率确定与第二目标信号对应的提前相关值、即时相关值和延迟相关值。作为示例,提前相关值包括第一提前相关值i
li,e
和第二提前相关值q
li,e
,即时相关值包括第一即时相关值i
li,p
和第二即时相关值q
li,p
,延迟相关值包括第一延迟相关值i
li,l
和第二延迟相关值q
li,l
。具体地:s321、利用码数字控制振荡器600根据先前的码相位和先前的码频率生成第一本地即时码本地提前码第二本地即时码和本地延迟码s322、利用副载波数字控制振荡器500根据先前的副载波相位和先前的副载波频率生成本地即时副载波sc
li
(t);其中,中,s323、根据第二目标信号的基带信号s
li
(t-τ)、本地即时副载波sc
li
(t)、本地提前码第二本地即时码和本地延迟码确定第一提前相关值i
li,e
、第二提前相关值q
li,e
、第一即时相关值i
li,p
、第二即时相关值q
li,p
、第一延迟相关值i
li,l
和第二延迟相关值q
li,l
。
[0125]
s330、根据第一提前相关值i
li,e
、第二提前相关值q
li,e
、第一延迟相关值i
li,l
和第二延迟相关值q
li,l
进行鉴相,以确定码相位误差和当前的码频率;具体地,可采用如下公式计算码相位误差:
[0126][0127]
s340、根据码相位误差更新先前的码相位以获得当前的码相位;
[0128]
s350、根据第一相关值i
ui,p
、第二相关值q
ui,p
、第一即时相关值i
li,p
、第二即时相关值q
li,p
进行鉴相,以确定副载波相位误差δμ和当前的副载波频率。具体地,可采用如下公式计算副载波相位误差δμ:
[0129][0130]
s360、根据副载波相位误差δμ更新先前的副载波相位以获得当前的副载波相
位。
[0131]
需要说明的是,在执行步骤s330时可采用本领域任意一种能够实现步骤s330的鉴相器来确定码相位误差和码频率。例如该鉴相器可以但不限于是码跟踪环路鉴相器。同理,在执行步骤s350时可采用本领域任意一种能够实现步骤s350的鉴相器来确定副载波相位误差和副载波频率。例如该鉴相器可以但不限于是副载波跟踪环路鉴相器。
[0132]
其中,上述步骤s323可包括:
[0133]
①
例如采用如下公式(2.1),在第二积分区间对第二目标信号的基带信号s
li
(t-τ)、本地即时副载波sc
li
(t)和本地提前码的乘积进行积分,以获得第一提前相关值i
li,e
和第二提前相关值q
li,e
:
[0134][0135]
其中,r∈{i,q},ri(t)为待跟踪的信号,为本地即时载波,sc
li
(t)为本地即时副载波,为本地提前码,t为相干积分时间,为先前的码相位,δe为生成本地提前码的延迟量。
[0136]
由此通过计算公式(2.1)便可得到第一提前相关值和第二提前相关值:
[0137][0138][0139]
其中,d
li
为下边带信号分量r
li
(t)携带的导航电文比特,p
ui
为下边带信号分量r
li
(t)的功率,为基带信号s
li
(t)的自相关函数,δe为生成本地提前码的延迟量,t为相干积分时间,为先前的码相位,sinc((δf
ui-δf
s,l
)t)=sin(π(δf
ul-δf
s,l
)t)/(π(δf
ul-δf
s,l
)t),δf
ul
为下边带信号分量r
li
(t)的载波频率误差,δf
s,l
为下边带信号分量r
li
(t)的副载波频率误差,δγ为下边带信号分量r
li
(t)的融合相位误差,δμ为下边带信号分量r
li
(t)的副载波相位误差。
[0140]
由于在实现稳定跟踪的情况下,δf
ul
≈0,δf
s,l
≈0,因此上述公式(2.2)和公式(2.3)可被整理为:
[0141][0142][0143]
②
采用如下公式,在第二积分区间对第二目标信号的基带信号s
li
(t-τ)、本地即时副载波sc
li
(t)和第二本地即时码的乘积进行积分,以获得第一即时相关值i
li,p
和第二即时相关值q
li,p
。
[0144][0145]
与上述步骤
①
计算原理相同,通过公式上述可得到第一即时相关值i
li,p
和第二即
时相关值q
li,p
:
[0146][0147][0148]
其中,d
li
为下边带信号分量r
li
(t)携带的导航电文比特,p
ui
为下边带信号分量r
li
(t)的功率,为基带信号s
li
(t)的自相关函数,δe为生成第二本地即时码的延迟量,t为相干积分时间,为先前的码相位,δγ为下边带信号分量r
li
(t)的融合相位误差,δμ为下边带信号分量r
li
(t)的副载波相位误差。
[0149]
③
采用如下公式在第二积分区间对第二目标信号的基带信号s
li
(t-τ)、本地即时副载波sc
li
(t)和本地延迟码的乘积进行积分,以获得第一延迟相关值i
li,l
和第二延迟相关值q
li,l
。
[0150][0151]
与上述步骤
①
计算原理相同,通过公式上述可得到第一即时相关值i
li,l
和第二即时相关值q
li,l
:
[0152][0153][0154]
其中,d
li
为下边带信号分量r
li
(t)携带的导航电文比特,p
ui
为下边带信号分量r
li
(t)的功率,为基带信号s
li
(t)的自相关函数,δ
l
为生成本地延迟码的延迟量,t为相干积分时间,为先前的码相位,δγ为下边带信号分量r
li
(t)的融合相位误差,δμ为下边带信号分量r
li
(t)的副载波相位误差。
[0155]
另外,在执行步骤s300之后,本技术实施例的信号跟踪方法还包括:
[0156]
s400、根据当前的码相位当前的副载波相位和当前的副载波频率fs确定当前的信号传播延迟其中,步骤s400可采用如下公式(3.1)来实现:
[0157][0158]
其中,ts=1/f
s,l
,f
s,l
=2fs。
[0159]
由上可知,本技术实施例中步骤s200和步骤s300采用了二维无模糊跟踪技术对信号分量的相位域而并未对信号分量的功率进行估计。相比于asym-dbt技术针对信号分量的幅度域也即对信号分量的功率进行估计,本技术实施例中相位跟踪的准确率更高。此外,现有dbt技术和asym-dbt技术跟踪的副载波频率为fs,而本技术的信号跟踪方法跟踪的是两倍的副载波频率即2fs。由于跟踪的副载波频率越高,最终通过鉴相获得的副载波相位的精度则越高,因此通过本技术的信号跟踪方法获得的副载波相位的精度高于采用dbt技术和asym-dbt技术获得的副载波相位,进而后续基于宽带复合信号进行测距的精度也更高。
[0160]
另外,如图4和图5所示,本技术实施例还提供了一种信号跟踪装置,该信号跟踪装置包括接收模块、载波环路、码环路和副载波环路。其中,接收模块接收宽带复合信号,宽带复合信号包括至少一个上边带信号分量和至少一个下边带信号分量。其中,载波环路利用
第一本地即时码对第一目标信号进行跟踪,以至少确定载波与副载波的当前的融合相位和当前的融合频率。其中,码环路和副载波环路利用本地即时载波对第二目标信号进行跟踪,以至少确定当前的码相位、当前的码频率、当前的副载波相位和当前的副载波频率。
[0161]
其中,第一目标信号和第二目标信号中的其中一个为上边带信号分量,另外一个为下边带信号分量;第一本地即时码基于先前的码相位和先前的码频率确定,本地即时载波基于先前的融合相位和先前的融合频率确定。
[0162]
如图2和图3所示,接收模块结构不同时接收宽带复合信号的方式不同,例如:
[0163]
在接收模块包括单信号通道300的情况下,接收模块利用该单信号通道300同步接收上边带信号分量和下边带信号分量。具体地,将接收模块的射频前端的中心频点放在上边带信号分量与下边带信号分量之间的中心频点处,接收模块的滤波器为低通滤波器,该低通滤波器的带宽也即单信号通道300的接收带宽覆盖上边带信号分量的功率主瓣100与下边带信号分量的功率主瓣200。
[0164]
在接收模块包括第一信号通道310和第二信号通道320的情况下,第一信号通道310与第二信号通道320相互独立且并行设置,接收模块利用第一信号通道310和第二信号通道320分别同步接收上边带信号分量和下边带信号分量。具体地,将接收模块的射频前端的中心频点放在上边带信号分量与下边带信号分量之间的中心频点处,接收模块的第一滤波器为带通滤波器,第一滤波器的带宽也即第一信号通道310的接收带宽覆盖上边带信号分量的功率主瓣100,接收模块的第二滤波器也为带通滤波器,第二滤波器的带宽也即第二信号通道320的接收带宽覆盖下边带信号分量的功率主瓣200。
[0165]
如图4和图5所示,载波环路包括载波数字控制振荡器400即载波nco、第一相关器410、第二相关器和第一鉴相器430。其中,载波数字控制振荡器400根据先前的融合相位和先前的融合频率生成本地即时载波以及根据融合相位误差更新先前的融合相位以获得当前的融合相位;第一相关器410计算宽带复合信号与本地即时载波的乘积,以获得第一目标信号的基带信号;第二相关器根据第一目标信号的基带信号和第一本地即时码确定与第一目标信号对应的目标相关值也即第一相关值和第二相关值;第一鉴相器430根据第一相关值和第二相关值确定融合相位误差和融合频率以及将融合相位误差和融合频率反馈至载波数字控制振荡器400。
[0166]
在一些实施例中,码环路和副载波环路包括副载波数字控制振荡器500即副载波nco、码数字控制振荡器600即码nco、第二鉴相器540、第三鉴相器610、第三相关器510和第四相关器。其中,第三相关器510基于本地即时载波对宽带复合信号进行载波剥离,以获得第二目标信号的基带信号。其中,副载波数字控制振荡器500根据先前的副载波相位和先前的副载波频率生成本地即时副载波以及根据副载波相位误差更新先前的副载波相位,以获得当前的副载波相位。其中,码数字控制振荡器600根据先前的码相位和先前的码频率生成第一本地即时码、本地提前码、第二本地即时码和本地延迟码以及根据码相位误差更新先前的码相位以获得当前的码相位。其中,第四相关器根据第二目标信号的基带信号、本地即时副载波、本地提前码、第二本地即时码和本地延迟码确定与第二目标信号对应的提前相关值、即时相关值和延迟相关值。作为示例,提前相关值包括第一提前相关值和第二提前相关值,即时相关值包括第一即时相关值和第二即时相关值,延迟相关值包括第一延迟相关值和第二延迟相关值。其中,第二鉴相器540根据提前相关值和延迟相关值确定码相位误差
和当前的码频率,并将码相位误差和当前的码频率反馈至码数字控制振荡器600。其中,第三鉴相器610根据目标相关值和即时相关值确定副载波相位误差和当前的副载波频率,并将副载波相位误差和当前的副载波频率反馈至副载波数字控制振荡器500。
[0167]
作为示例,第一鉴相器430可以但不限于是载波跟踪环路鉴相器,第二鉴相器540可以但不限于是码跟踪环路鉴相器,第三鉴相器610可以但不限于是副载波跟踪环路鉴相器。
[0168]
进一步地,第二相关器包括第一乘积相关器421和第一积分相关器422,第四相关器包括第二乘积相关器521、第三乘积相关器522和第二积分相关器530。
[0169]
其中,载波数字控制振荡器400、第一相关器410、第二相关器和第一鉴相器430首位依次连接;接收模块的输出端分别与第一相关器410和第三相关器510的输入端连接;第一乘积相关器421与码数字控制振荡器600的输出端连接,用于接收码数字控制振荡器600生成的第一本地即时码,以计算第一目标信号的基带信号和第一本地即时码的乘积;第一积分相关器422的输入端与第一乘积相关器421的输出端连接,用于在第一积分区间内对第一目标信号的基带信号和第一本地即时码的乘积进行积分,以获取第一相关值和第二相关值。第一积分相关器422的输出端分别与第一鉴相器430的输入端和第三鉴相器610的输入端连接,第一鉴相器430的输出端与载波数字控制振荡器400的输入端连接。载波数字控制振荡器400的输出端与第三相关器510的输入端连接,第三相关器510基于载波数字控制振荡器400生成的本地即时载波对宽带复合信号进行载波剥离,以获得第二目标信号的基带信号;第二乘积相关器521分别与副载波数字控制振荡器500的输出端和第三相关器510的输出端连接,用于接收副载波数字控制振荡器500生成的本地即时副载波,并计算本地即时副载波与第二目标信号的基带信号的乘积;第三乘积相关器522的输入端分别与第二乘积相关器521的输出端和码数字控制振荡器600的输出端连接,用于计算码数字控制振荡器600生成的本地提前码、第二本地即时码和本地延迟码分别与第二乘积相关器521输出值的乘积。第二积分相关器530的输入端与第三乘积相关器522的输入端连接,用于在第二积分区间对第二乘积相关器521的输出值进行积分,以获得第一提前相关值、第二提前相关值、第一即时相关值、第二即时相关值、第一延迟相关值和第二延迟相关值。第二积分相关器530的输出端分别与第二鉴相器540和第三鉴相器610的输入端连接,第二鉴相器540的输出端与码数字控制振荡器600的输入端连接,第三鉴相器610的输出端与副载波数字控制振荡器500的输入端连接。
[0170]
下面以上文中提及的第一种待跟踪信号为例,也即,以待跟踪的信号ri(t)为r
ui
(t) r
li
(t),基准相位为上边带信号分量r
ui
(t)的相位φ
ui
(t)为例,对载波环路的工作原理进行说明:
[0171]
如图4和图5所示,载波数字控制振荡器400根据先前的融合相位和先前的融合频率f
ui
生成本地即时载波第一相关器410根据接收模块输出的待跟踪的信号ri(t)以及载波数字控制振荡器400输出的本地即时载波计算得到第一目标信号的基带信号s
ui
(t-τ);第一乘积相关器421根据第一目标信号的基带信号s
ui
(t-τ)以及码数字控制振荡器600生成的第一本地即时码计算第一目标信号的基带信号s
ui
(t-τ)和第一本地即时码的乘积,第一积分相关器422在第一积分区间[0,t]内对第一目标信号
的基带信号s
ui
(t-τ)和第一本地即时码的乘积进行积分,以获取第一相关值i
ui,p
和第二相关值q
ui,p
;第一鉴相器430根据第一相关值i
ui,p
和第二相关值q
ui,p
进行鉴相并将通过鉴相获得融合相位误差δγ和当前的融合频率输出至载波数字控制振荡器400,载波数字控制振荡器400根据该融合相位误差更新先前的融合相位以获得当前的融合相位,该融合相位和融合频率又可以分别作为下一轮跟踪循环所需先前的融合相位和先前的融合频率。
[0172]
同理,载波数字控制振荡器400将生成的本地即时载波传输至第三相关器510,第三相关器510计算本地即时载波与待跟踪信号ri(t)的乘积以获得第二目标信号的基带信号s
li
(t-τ)。副载波数字控制振荡器500将根据先前的副载波相位和先前的副载波频率生成的本地即时副载波sc
li
(t)传输至第二乘积相关器521,第二乘积相关器521计算第二目标信号的基带信号s
li
(t-τ)与本地即时副载波sc
li
(t)的乘积。码数字控制振荡器600将根据先前的码相位和先前的码频率生成本地提前码第二本地即时码和本地延迟码传输至第三乘积相关器522,第三乘积相关器522计算本地提前码第二本地即时码和本地延迟码分别与第二乘积相关器521的输出值的乘积。第二积分相关器530在第二积分区间对第二乘积相关器521的输入值进行积分,以确定第一提前相关值i
li,e
、第二提前相关值q
li,e
、第一即时相关值i
li,p
、第二即时相关值q
li,p
、第一延迟相关值i
li,l
和第二延迟相关值q
li,l
。第二鉴相器540根据第一提前相关值i
li,e
、第二提前相关值q
li,e
、第一延迟相关值i
li,l
和第二延迟相关值q
li,l
进行鉴相,以确定码相位误差和当前的码频率,并将码相位误差和当前的码频率反馈至码数字控制振荡器600。码数字控制振荡器600根据码相位误差更新先前的码相位以获得当前的码相位,该码相位和码频率又可以分别作为下一轮跟踪循环所需先前的码相位和先前的码频率。第三鉴相器610根据第一相关值i
ui,p
、第二相关值q
ui,p
、第一即时相关值i
li,p
、第二即时相关值q
li,p
进行鉴相以确定副载波相位误差δμ和当前的副载波频率,并将副载波相位误差δμ和当前的副载波频率反馈至副载波数字控制振荡器500。副载波数字控制振荡器500根据副载波相位误差δμ更新先前的副载波相位以获得当前的副载波相位,该副载波相位和副载波频率又可以分别作为下一轮跟踪循环所需先前的副载波相位和先前的副载波频率。
[0173]
此外,该信号跟踪装置还包括延迟计算模块,延迟计算模块用于根据当前的码相位、当前的副载波相位和当前的副载波频率确定当前的信号传播延迟。
[0174]
下面采用本技术实施例中信号跟踪装置进行仿真试验:
[0175]
如表1所示,本次仿真试验针对的是叠加了不同功率白噪声的ace-boc宽带复合信号,待跟踪信号仍为ri(t),基准相位为上边带信号分量r
ui
(t)的相位φ
ui
(t)。
[0176]
表1 ace-boc宽带复合信号的参数表
[0177]
参数参数值卫星编号c19中频频率0mhz
数据格式i&q采样率60mhz载噪比40~50db-hz信号分量功率比(p
li
:p
lq
:p
ui
:p
uq
)1:1.2:0.5:1.4
[0178]
如表2所示,载波环路为锁相环(phase-locked loop,简称pll),码环路为数字延迟锁相环(delay lock loop,简称dll),副载波环路为副载波跟踪环路(subcarrier lock loop,简称sll)。
[0179]
表2载波环路、码环路和副载波环路的参数表
[0180]
参数参数值pll阶数2pll环路滤波带宽5hzdll阶数2dll环路滤波带宽1/2/5hzdll早迟间隔0.5chipssll阶数2sll环路滤波带宽1/2/5hz相干积分时间t1ms
[0181]
如图6所示,通过仿真试验发现采用本技术实施例中的信号跟踪方法产生的载噪比与采用现有bpsk-like跟踪技术产生的载噪比基本相同。由于现有bpsk-like跟踪技术是将上边带信号分量r
ui
(t)和下边带信号分量r
li
(t)分别作为单独的信号进行跟踪,而本技术是对上边带信号分量r
ui
(t)和下边带信号分量r
li
(t)同时进行联合跟踪,因此两者载噪比基本相同间接说明了本技术的信号跟踪方法稳定性强。
[0182]
此外,如图7所示,本技术的信号跟踪方法跟踪的是两倍的副载波频率即2fs,下边带信号分量r
li
(t)的自相关函数包络与bpsk信号的自相关函数包络一致,从而也说明了采用本技术的信号跟踪方法获得的副载波相位和码相位准确性高。
[0183]
另外,如图8所示,通过仿真试验发现在不同环路滤波带宽下,采用本技术实施例中的信号跟踪方法的热噪声性能优于采用现有bpsk-like跟踪技术产生的热噪声性能。相比于bpsk-like跟踪技术,本技术实施例中的信号跟踪方法的跟踪误差更小。此外,如图9所示,在环路带宽为5hz且载噪比为50db-hz情况下,相比于bpsk-like跟踪技术,本技术实施例中的信号跟踪方法的码减载波(code minus carrier,简称cmc)的波动更小,可见本技术实施例中的信号跟踪方法可提高测距的精度。
[0184]
应该理解,可以使用上面所示的各种形式的流程,重新排序、增加或删除步骤。例如,本发公开中记载的各步骤可以并行地执行也可以顺序地执行也可以不同的次序执行,只要能够实现本技术公开的技术方案所期望的结果,本文在此不进行限制。
[0185]
上述具体实施方式,并不构成对本技术保护范围的限制。本领域技术人员应该明白的是,根据设计要求平均其他因素,可以进行各种修改、组合、子组合和替代。任何在本技术的精神和原则之内所作的修改、等同替换和改进等,均应包含在本技术保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。