1.本发明涉及医疗信息采集检测和临床医学技术领域,尤其涉及一种基于图像技术的显微扫描载物台与物镜垂直度的调整方法。
背景技术:
2.近年来,经济的蓬勃发展带来了人们对美好生活的向往,人们愈发注重自身的生活水平,也对自己的身体健康愈发关注,更多的人开始有定期体检的习惯。在体检中不乏有血液检查、尿液检查等一些镜检检查,不单如此,在大多数的癌症确诊、肿瘤筛查中,都需要显微镜镜检。
3.而传统的显微镜镜检已经不再适用于待检玻片数量大、镜检结果得出时间紧的情况,人工长时间镜检操作导致的视觉疲劳等情况影响了镜检结果,发生有镜检遗漏、镜检错误等情况,加之人工镜检的重复聚焦操作导致耗时耗力、效率低下,从而诞生了一种自动显微扫描仪。在数字图像技术和计算机技术的协同下,自动显微扫描仪能够自动聚焦,使镜检更高效、更准确,大大降低了使用成本,缩短了镜检结果时间。
4.自动显微扫描仪受到其自身安装精度的影响,安装精度的高低对扫描仪的工作性能、效率、准确性等起到关键作用,加之成像原理要求显微镜物镜轴线与扫描平台平面具有较高的垂直度要求,对安装调试要求较高。然而目前没有测量安装垂直度的专用仪器和方法,紧靠水平仪粗略调平安装,进而安装完成后对各组件平面度调整。即便如此,也很难保障物镜镜头轴线与扫描平台垂直度的精度要求,同时要求安装人员具备较高的技术水平。
技术实现要素:
5.本发明针对上述技术问题,提出一种基于图像技术的显微扫描载物台与物镜垂直度的调整方法,能够帮助仪器装配人员方便、直观、定量地完成载物台与物镜垂直度的调整安装,使得物镜镜头轴线基本垂直于载物台所在平面,即对物镜镜头视为一个质点时所在平面和载物台平面基本平行,从而在后续镜检时仅需进行三五次聚焦甚至单次聚焦就能得到整个玻片任意位置的清晰成像,以此可以克服以往镜头每观测同一玻片的不同视野进行重新聚焦的问题,能够有效避免重复聚焦操作,减少在聚焦过程中所耗费的时间,提高镜检效率。
6.为了实现上述目的,本发明提供如下技术方案:
7.本发明提供了一种基于图像技术的显微扫描载物台与物镜垂直度的调整方法,包括以下步骤:
8.s1:将镜头看作一个质点,取玻片长边为x方向,玻片短边为y方向,竖直方向为z方向,建立空间直角坐标系;
9.s2:在玻片上选取一个标志点,该点向坐标原点靠近并在视野区域,而后对该标志点进行聚焦操作,得到玻片在该点处的大致焦平面所在;
10.s3:调整载物台使该点成像最清晰,从而使载物台上的玻片所在平面和玻片焦平
面在该点相交,此时得到玻片所在平面到镜头的距离,即对焦距离;
11.s4:保持镜头到玻片距离即对焦距离不变,向x方向平移一定距离得到新的一个标记点,该点在x方向上远离步骤二中的点且在视野区域内;同时利用图像评价函数调整载物台,直到得到最为清晰的图像为止,此时玻片焦平面在该点上与玻片所在平面相交;
12.s5:保持镜头对焦距离不变,向y方向平移一定距离,或者先回到步骤s2的标志点再向y方向平移一定距离,得到又一新的标志点,该点在y方向上远离平移前的点且在视野区域内,向玻片短边方向平移一定距离,同理利用图像评价函数调整载物台,直到得到最为清晰的图像为止,从而得到玻片焦平面在该点上与玻片所在平面相交。
13.进一步地,步骤s2采用往复聚焦法完成标志点的聚焦操作。
14.进一步地,往复聚焦法具体为:自上而下完成一次操作,由此可以得到首次玻片焦平面所在;再进行自下而上第二次聚焦操作,通过对比前后两次焦平面位置,即镜头到玻片的竖直距离,若前后差值小于镜头的景深则取平均值,若前后差值大于镜头的景深,则进行第三次聚焦操作;完成第三次操作后,同理采用对比取均值的方式确定焦平面大致位置。
15.进一步地,步骤s2针对每个标记点进行往复聚焦时,采用抽帧评价聚焦法。
16.进一步地,抽帧评价聚焦法具体为:针对一个待聚焦的视野点时,对该点进行步进拍摄同步帧速保存视频文件,对视频文件进行视频抽帧解析出每一帧图像,应用评价函数计算每一帧图像的函数值,求出函数的峰值对应的图像即为最清晰的那一帧图像,峰值对应的索引对应步进拍摄的位置即焦平面的位置。
17.与现有技术相比,本发明的有益效果为:
18.本发明提出一种基于图像技术的显微扫描载物台与物镜垂直度的调整方法,是一种针对医学病理玻片显微自动扫描仪载物台安装过程的镜头轴线和载物台所在平面的垂直度的调整方法,避免了垂直度不达标导致扫描平台无法准确完成自动聚焦的问题,可有效提高自动扫描过程效率,降低自动聚焦的控制实现难度,为显微自动扫描仪的载物台装置合理安装调整提供了新的思路,在医疗病理类玻片显微视觉自动检测行业有着广泛的应用前景。其主要优点如下:
19.(1)降低技术人员的工作难度与强度的同时保证了效率和精度;
20.(2)镜头轴线和载物台所在平面的垂直度经过合适调整后再结合“焦平面方程”控制载物台垂直移动快速实现物镜视野定位聚焦,避免“同一玻片多视野重复聚焦”,仅需在原有对焦距离基础上依据区域焦平面方程模型重新计算出焦平面位置调整
△
z距离就能在镜头观察到清晰的玻片图像,提高了工作效率。
附图说明
21.为了更清楚地说明本技术实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明中记载的一些实施例,对于本领域普通技术人员来讲,还可以根据这些附图获得其他的附图。
22.图1为本发明实施例提供的基于图像技术的显微扫描载物台与物镜垂直度的调整方法流程图。
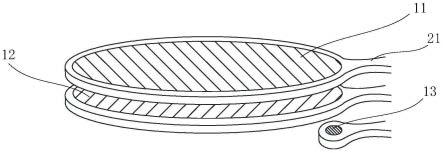
23.图2为本发明实施例提供的待调整的载物台与镜头结构关系图。
24.图3为本发明实施例提供的基于图像方法的扫描平台调整示例图解。
25.图4为本发明实施例提供的镜头轴线与载物台平面的垂直度表示图。
26.图5为本发明实施例提供的往复聚焦方案中应用的抽帧评价聚焦流程示意图。
具体实施方式
27.下面结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。本发明中的实施例,本领域技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
28.本发明提出一种基于图像技术的显微扫描载物台与物镜垂直度的调整方法,流程如图1所示,包括以下步骤:
29.步骤一:将镜头看作一个质点,取玻片长边为x方向,玻片短边为y方向,竖直方向为z方向,建立空间直角坐标系。
30.步骤二:在玻片上选取一个标志点,该点应尽可能向坐标原点靠近并在视野区域,而后对该点采用往复聚焦法完成聚焦操作,得到玻片在该点处的大致焦平面所在。
31.步骤三:调整载物台使该点成像最清晰,从而使载物台上的玻片所在平面和玻片焦平面在该点相交,此时得到玻片所在平面到镜头的距离,即对焦距离。
32.步骤四:保持镜头到玻片距离即对焦距离不变,向x方向平移一定距离得到新的一个标记点,该点应尽可能在x方向上远离步骤二中的点且在视野区域内。同时利用图像评价函数调整载物台,直到得到最为清晰的图像为止,此时玻片焦平面在该点上与玻片所在平面相交。
33.步骤五:保持镜头对焦距离不变,向y方向平移一定距离,亦可先回到步骤二的标志点再向y方向平移一定距离,得到又一新的标志点,该点应尽可能在y方向上远离平移前的点且在视野区域内。向玻片短边方向平移一定距离,同理利用图像评价函数调整载物台,直到得到最为清晰的图像为止,从而得到玻片焦平面在该点上与玻片所在平面相交。
34.经过上述步骤,玻片所在平面中有三个点且在这三个点上均使玻片的焦平面和玻片所在平面重合。根据不共线的三点确定一个平面可得到,此时玻片的焦平面和玻片所在平面大致基本重合,即在视野中观察玻片上的任意区域均能看到最为清晰的图像。以此定量得到镜头轴线和载物台所在平面的垂直度,公差为镜头的景深大小。
35.本发明利用上述方法对玻片进行三次聚焦,然后可以调整玻片所在平面与焦平面近似重合,方便后续不在重复聚焦就可采集到清晰的图像,具体操作如下:
36.对镜头处理成一个质点,取玻片的一角点为原点,以玻片长边为x方向,玻片短边为y方向,竖直方向为z方向,建立空间直角坐标系,待调整的载物台与镜头相对位置如图2所示。
37.首先在玻片上选取一个点并记为点o,镜头当前位置记为o
′
,然后对点o进行聚焦操作,根据图像的评价函数得到点o的焦平面,此时镜头距离玻片所在平面的垂直距离oo
′
即为镜头的对焦距离。由于自动显微扫描仪在同一次扫描过程中不会更换镜头,则对焦距离oo
′
是固定不变的,记为zo。
38.在该过程中的聚焦操作采用“往复聚焦”方案,根据聚焦方法在自上而下完成一次操作,由此可以得到首次玻片焦平面所在。但由于聚焦操作仅一次,对玻片焦平面的确定具
有较大误差,即在调整载物台的过程中依旧会出现载物台上的玻片与其焦平面不重合的情况出现,导致平面度误差范围大。因此,首次完成聚焦操作后,再进行第二次聚焦操作,但方向由自上而下改为自下而上,以更好地确定焦平面位置。通过对比前后两次焦平面位置,即镜头到玻片的竖直距离,若两个距离数值接近[前后差值小于镜头的景深]则取平均值,即焦平面到镜头的距离必在该平均值左右;若两个距离数值相差较大[前后差值大于镜头的景深],则进行第三次聚焦操作。完成第三次操作后,同理采用对比取均值的方式确定焦平面大致位置。确定了焦平面大致位置后,将载物台进行调整,使点o成像最为清晰,此时玻片所在平面和其焦平面相交于点o。
[0039]
之后,以点o为起始点,分别向x、y两个方向对载物台进行平移一定距离得到点c和点d,镜头所处位置分别为点a
′
和点b
′
。得到点c的平移距离即点o到点c的距离,用
△
x表示;得到点d的平移距离即点o到点d的距离,用
△
y表示。
[0040]
固定镜头焦距不变,分别在点c、点d处进行调整载物台操作。利用图像的评价函数可以得到当载物台调整到合适位置时,点c的焦平面即为点a所在平面,此时对应载物台的调整位置为点c和点a重合。又距离aa
′
和距离oo
′
相等均为zo,所以点c仅需调整距离
△
zx即可达到和点a重合。同理,对于点d固定镜头焦距不变,即距离bb
′
和距离oo
′
相等均为zo,调整载物台操作使和点d的焦平面上包含点b,即调整距离
△
zy,点d和点b重合。
[0041]
由于在安装调整过程中,镜头焦距保持不变,即|oo
′
|=|aa
′
|=|bb
′
|=zo不变,调整载物台后,玻片上点c、点d分别与点a、点b重合。根据不共线三点确定一个平面,即可得到当玻片所在平面上包含点o、点a、点b时,玻片所在平面和自身焦平面大致重合,亦大致平行于镜头所在平面。如图3所示。
[0042]
由此可以得到镜头的轴线和玻片大致垂直,根据垂直度定义,将镜头轴线视为基准直线,载物台平面为被测平面,由于镜头的景深引起在焦平面附近区域也是成像清晰的,则镜头轴线与载物台平面的垂直度可以用镜头的景深大小来表示。如图4所示。
[0043]
针对每个mark点往复聚焦时,采用抽帧评价聚焦法,此评价聚焦是应用图像评价函数在对玻片样本图像步骤拍摄时快速高帧率保存视频并对视频进行抽帧评价找出评价函数极值的聚焦过程,该方法的核心思想是针对一个待聚焦的视野点时,对该点进行步进拍摄同步帧速保存视频文件,对视频文件进行视频抽帧解析出每一帧图像,应用评价函数计算每一帧图像的函数值,求出函数的峰值对应的图像即为最清晰的那一帧图像,峰值对应的索引对应步进拍摄的位置即焦平面的位置,流程大致如图5所示。
[0044]
经上述如此安装调整后,在不更换镜头并且不调整载物台,且保证所扫描的玻片厚度一致的条件下,后续扫描过程中可以不再进行重复聚焦操作。
[0045]
结果表明:该基于图像技术的显微扫描载物台与物镜垂直度的调整方法,为后续实际应用玻片自动聚焦需求时创造了硬件安装基础,图像聚焦难度得到简化,速率更为高效,可满足医学病理玻片样本显微视觉检测的快速聚焦采图需求,可以满足多数医学病理玻片载物台的安装调整使用场景。
[0046]
以上所述实施例,仅为本技术的具体实施方式,用以说明本技术的技术方案,而非对其限制,本技术的保护范围并不局限于此,尽管参照前述实施例对本技术进行了详细的说明,本领域的普通技术人员应当理解:任何熟悉本技术领域的技术人员在本技术揭露的技术范围内,其依然可以对前述实施例所记载的技术方案进行修改或可轻易想到变化,或
者对其中部分技术特殊进行等同替换;而这些修改、变化或者替换,并不使相应技术方案的本质脱离本技术实施例技术方案的精神和范围。都应涵盖在本技术的保护范围之内。因此,本技术的保护范围应所述以权利要求的保护范围为准。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。